




LKMTECH MG4005E-i10-V3 প্ল্যানেটারি গিয়ার মোটর, ২৪ভি ১:১০ PG4210, RS485/CAN ডুয়াল এনকোডার
LKMTECH MG4005E-i10-V3 প্ল্যানেটারি গিয়ার মোটর, ২৪ভি ১:১০ PG4210, RS485/CAN ডুয়াল এনকোডার
LKMTECH
পিকআপের উপলভ্যতা লোড করা যায়নি
অভিধান
এটি LKMTECH MG4005E-i10-V3 মোটর একটি প্ল্যানেটারি গিয়ার মোটর যা রোবোটিক গতিবিধি এবং স্বয়ংক্রিয় জয়েন্টগুলির জন্য ডিজাইন করা হয়েছে যা কমপ্যাক্ট গিয়ারিং, বন্ধ-লুপ ফিডব্যাক এবং বাস যোগাযোগের প্রয়োজন। এটি একটি প্ল্যানেটারি গিয়ার রিডিউসার (PG4210, 1:10) এবং দুটি আবসোলিউট ম্যাগনেটিক এনকোডার (মোটর সাইড + রিডিউসার সাইড) সঠিক নিয়ন্ত্রণের জন্য একত্রিত করে।
মূল বৈশিষ্ট্য
- প্ল্যানেটারি গিয়ার মোটর: উচ্চ শক্তি, বড় টর্ক, এবং উচ্চ নির্ভুলতা
- ব্রাশলেস মোটর + উচ্চ নির্ভুল প্ল্যানেটারি গিয়ার রিডিউসার
- FOC নিয়ন্ত্রণ (ড্রাইভ/ড্রাইভার প্রয়োজন)
- ডুয়াল এনকোডার: ১৮-বিট একক-টার্ন আবসোলিউট ম্যাগনেটিক এনকোডার (মোটর পাশে) + ১৪-বিট একক-টার্ন আবসোলিউট ম্যাগনেটিক এনকোডার (রিডিউসার পাশে)
- রিডিউসার-পাশের এনকোডার একক টার্নের আউটপুট আবসোলিউট মান সমর্থন করে এবং পাওয়ার অফ করার পর শূন্য পয়েন্ট মনে রাখে
- RS485 অথবা CAN বাস যোগাযোগ
- PC সফটওয়্যার, পরীক্ষা, এবং ফার্মওয়্যার আপগ্রেডের মাধ্যমে প্যারামিটার সমন্বয় সমর্থন করে
- ওপেন সোর্স ডেভেলপমেন্ট প্ল্যাটফর্ম সমর্থন করে: PC, MCU, PLC, শিল্প কম্পিউটার, এবং রাস্পবেরি পাই
- একাধিক নিয়ন্ত্রণ মোড সমর্থিত: টর্ক মোড, স্পিড মোড, মাল্টি-টার্ন নিয়ন্ত্রণ মোড, সিঙ্গল-টার্ন পজিশন + দিক মোড, ইনক্রিমেন্টাল পজিশন মোড, মাল্টি-টার্ন নিয়ন্ত্রণ মোড (স্পিড লিমিট সহ), সিঙ্গল-টার্ন পজিশন + দিক মোড (স্পিড লিমিট সহ), ইনক্রিমেন্ট পজিশন মোড (স্পিড লিমিট সহ)
- ডুয়াল তাপমাত্রা সেন্সর ইন্টারফেসগুলি মোটর এবং ড্রাইভের তাপমাত্রা বাস্তব সময়ে পর্যবেক্ষণ করে
- সংরক্ষিত ব্রেক ফাংশন (ব্রেক / ব্রেক রিলিজ)
- বহু সুরক্ষা ফাংশন তালিকাবদ্ধ: ইউভিপি, ওভিপি, ডিটিপি, এমটিপি, ওসিপি, এসসিপি, এমএসপি, এলআইপি
একীকরণ সমর্থন এবং প্রি-সেল নিশ্চিতকরণের জন্য, যোগাযোগ করুন https://rcdrone.top/ অথবা ইমেইল করুন [email protected].
স্পেসিফিকেশন
| আইটেমের নাম | MG4005E-i10-V3 |
| রেটেড ভোল্টেজ | 24V |
| সর্বাধিক গতি | 320RPM |
| রেটেড টর্ক | 1 N.m |
| রেটেড গতি | 255RPM |
| রেটেড কারেন্ট | 1.8A |
| সর্বাধিক শক্তি | 65W |
| সর্বাধিক টর্ক | 2.5 N.m |
| গতি ধ্রুবক | 106.3rpm/V |
| টর্ক ধ্রুবক | 0.06 N.m/A |
| টার্ন | 28 |
| ওয়াইন্ডিং টাইপ | Y |
| ফেজ প্রতিরোধ | 1.4Ω |
| ফেজ ইন্ডাকট্যান্স | 0.5mH |
| মোটর পোল | 28 |
| রোটর জড়তা | 140gcm² |
| মোটর তাপমাত্রা | হ্যাঁ |
| রিডিউসার টাইপ | PG4210 |
| হ্রাস অনুপাত | 1:10 |
| ব্যাকল্যাশ | ≤10 আর্কমিন |
| বেয়ারিং রেটেড লোড | 1000N |
| মোটর ওজন | 183g |
| প্রস্তাবিত ড্রাইভ | DG40E |
| ড্রাইভ ইনপুট ভোল্টেজ | 7.৪-৩২ভি |
| যোগাযোগ | আরএস৪৮৫ অথবা কান |
| যোগাযোগ ফ্রিকোয়েন্সি | আরএস৪৮৫: ৫০০হেজ (১১৫২০০বিপিএস) / কান: ২কেজ (১এমবিপিএস) |
| এনকোডার | ১৮-বিট (মোটর) + ১৪-বিট (রিডিউসার) চৌম্বক এনকোডার |
| এনকোডার বাউডরেট (আরএস৪৮৫) | ৯৬০০, ১৯২০০, ৫৭৬০০, ১১৫২০০, ২৩৪০০, ৪০৬৮০০, ১এম, ২এমবিপিএস |
| ১০০কে, ১২৫কে, ২৫০কে, ৫০০কে, ১এম | |
| নিয়ন্ত্রণ মোড | টর্ক লুপ (২৪কেজ) / স্পিড লুপ (৮কেজ) / পজিশন লুপ (৪কেজ) |
| অ্যাক্সিলারেশন কার্ভ | ট্রাপিজয়েড অ্যাক্সিলারেশন |
ইন্টারফেস সংজ্ঞা
| ইন্টারফেস | নোট |
|---|---|
| এ/এইচ | আরএস৪৮৫-এ অথবা কান-এইচ |
| বি/এল | আরএস৪৮৫-বি অথবা কান-এল |
| V- | নেতিবাচক পাওয়ার সাপ্লাই |
| V+ | ইতিবাচক পাওয়ার সাপ্লাই |
| A/H | RS485-A অথবা CAN-H |
| B/L | RS485-B অথবা CAN-L |
| T | UART ট্রান্সমিটার |
| R | UART রিসিভার |
| G | সিগন্যাল GND |
অ্যাপ্লিকেশন
- মানবাকৃতির রোবট
- রোবটিক হাত
- এক্সোস্কেলেটন / পরিধানযোগ্য রোবট
- চতুর্ভুজ রোবট / রোবট কুকুর
- AGV যানবাহন / AGV গাড়ি
- ARU রোবট
ম্যানুয়াল / ফাইল
বিস্তারিত

MG4005E-i10-V3 একটি ব্রাশলেস মোটর এবং একটি প্ল্যানেটারি রিডিউসারকে একটি কমপ্যাক্ট আকারে রোবোটিক জয়েন্ট এবং অটোমেশন অক্ষের জন্য সংযুক্ত করে।

ডুয়াল সিঙ্গল-টার্ন অ্যাবসোলিউট ম্যাগনেটিক এনকোডারগুলি মোটর-সাইড এবং আউটপুট-সাইড ফিডব্যাক প্রদান করে, বাস সেটআপের জন্য একটি নিবেদিত আইডি সুইচ সহ।
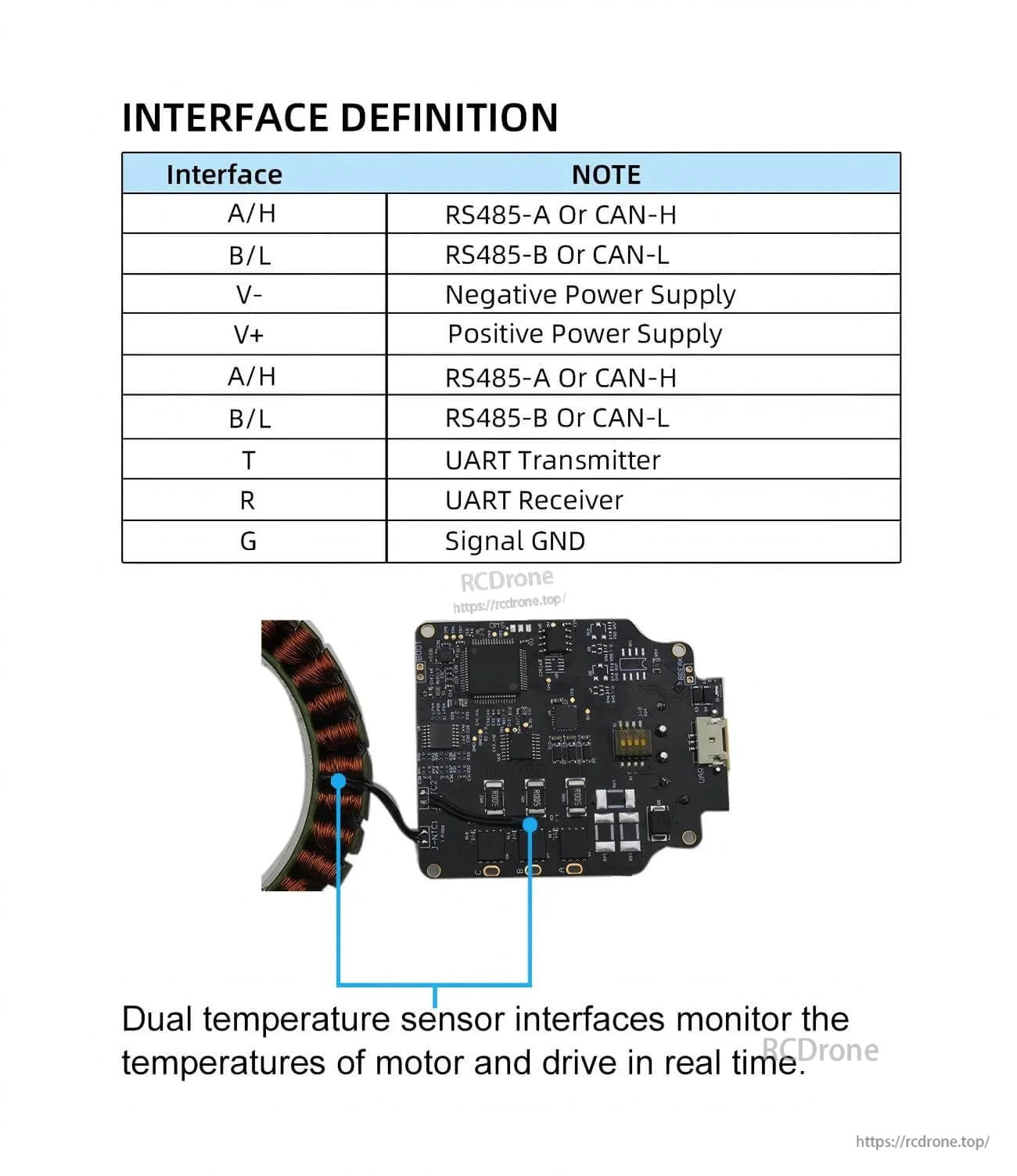
ওয়ায়ারিংটি পাওয়ার, RS485/CAN যোগাযোগ এবং UART সিগন্যাল সংযোগের জন্য স্পষ্টভাবে সংজ্ঞায়িত টার্মিনালগুলির সাথে সহজ করা হয়েছে।
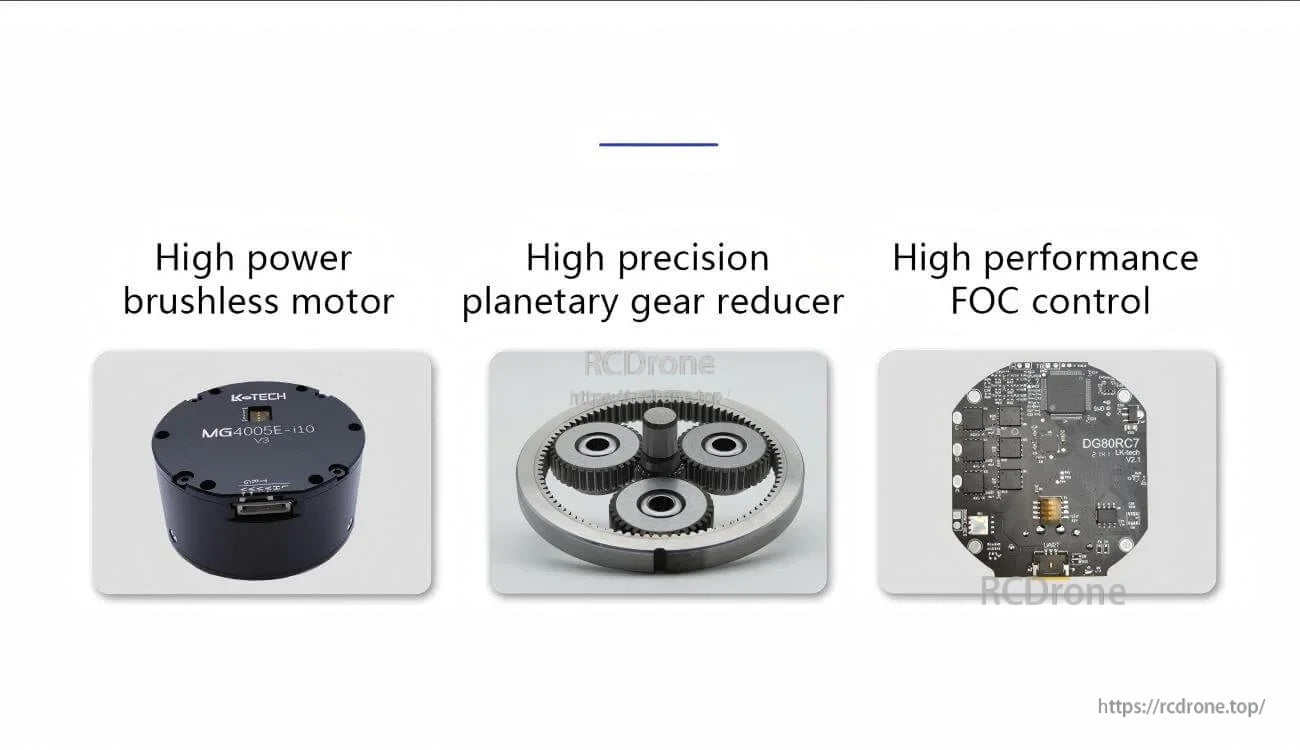
একটি ব্রাশলেস মোটর, সঠিক প্ল্যানেটারি গিয়ারিং, এবং FOC নিয়ন্ত্রণ মসৃণ টর্ক বিতরণ এবং সঠিক গতির নিয়ন্ত্রণ সমর্থন করে।

ড্রাইভটি RS485 বা CAN যোগাযোগ এবং নমনীয় ইন্টিগ্রেশনের জন্য একটি বিস্তৃত ইনপুট ভোল্টেজ পরিসীমা (7.4–32V) সমর্থন করে।
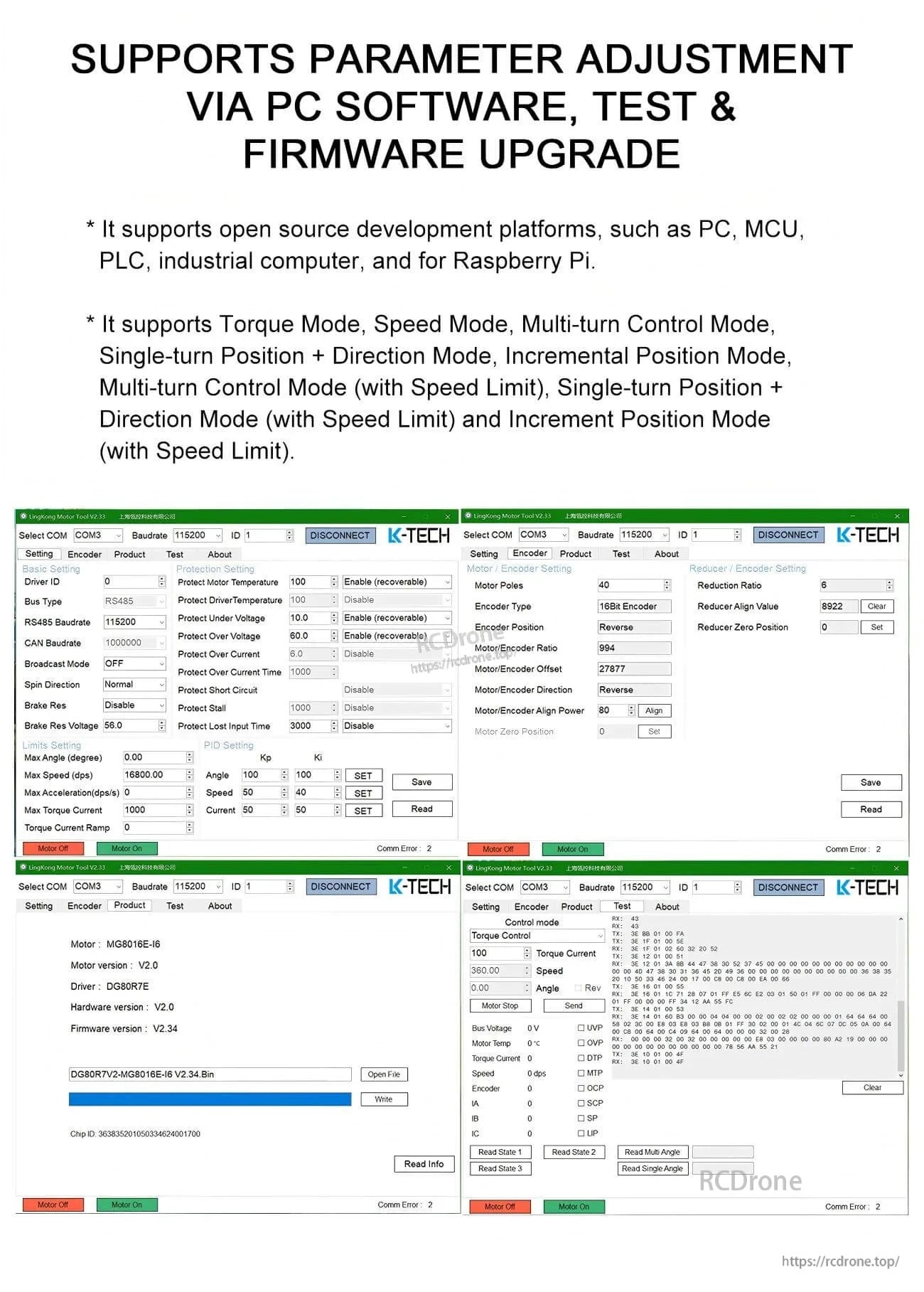
পিসি সফটওয়্যার প্যারামিটার টিউনিং, কার্যকরী পরীক্ষণ, এবং কমিশনিং এবং রক্ষণাবেক্ষণের সময় ফার্মওয়্যার আপগ্রেডের অনুমতি দেয়।
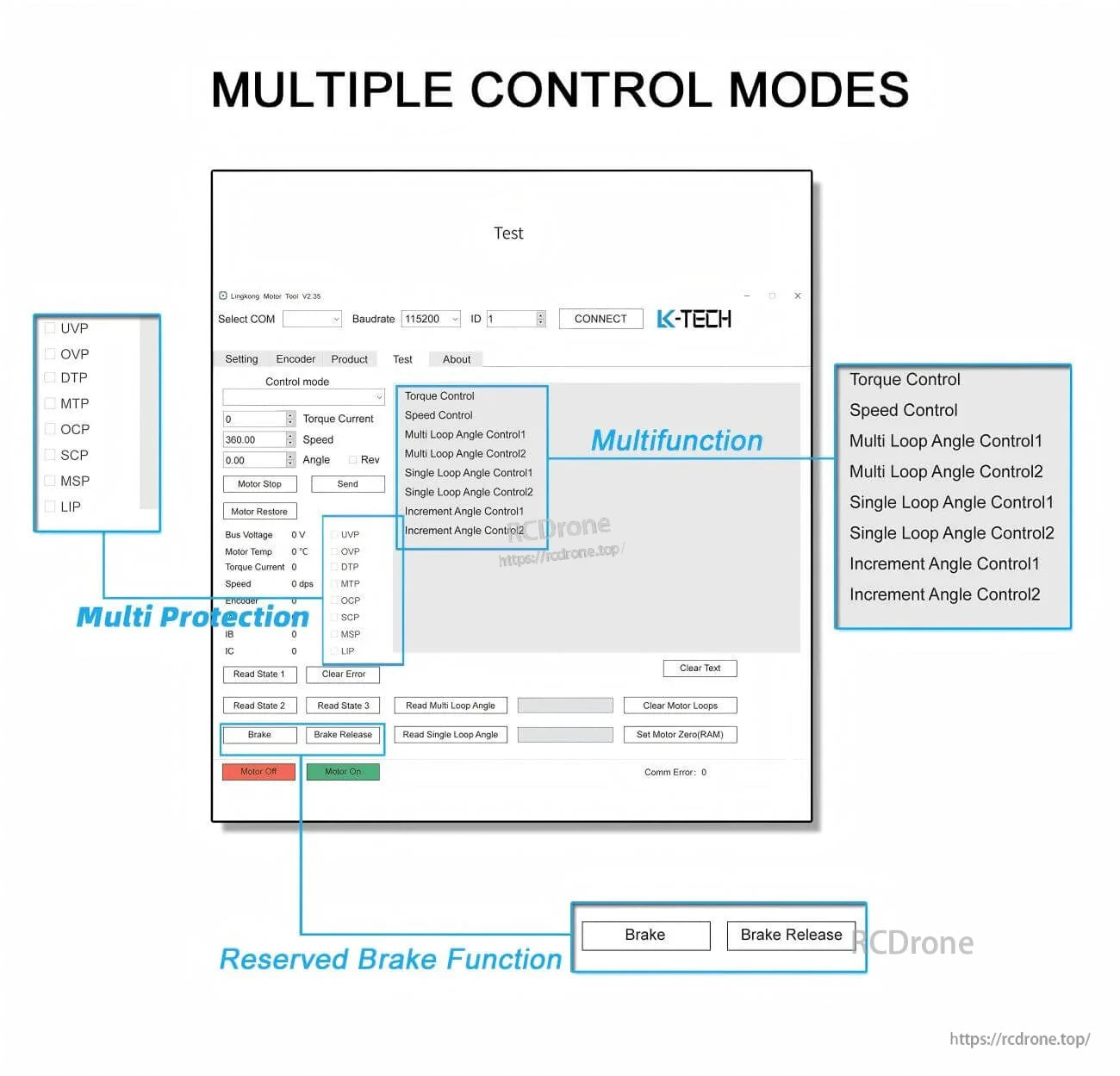
টর্ক, গতি, এবং অবস্থান নিয়ন্ত্রণের মতো একাধিক নিয়ন্ত্রণ মোড থেকে নির্বাচন করুন, বিল্ট-ইন সুরক্ষা স্থিতি পর্যবেক্ষণের সাথে।
মোবাইল রোবট, আর্টিকুলেটেড আর্ম, কোয়াড্রুপেড, এবং পরিধানযোগ্য রোবোটিক্সে কমপ্যাক্ট অ্যাকচুয়েশন জন্য ডিজাইন করা হয়েছে।
Related Collections




