




LKMTECH MG4010E-i10-V3 মোটর ২৪ভি ৩২০আরপিএম ২.৫এন.মি প্ল্যানেটারি গিয়ার রিডিউসার ১:১০ RS485/CAN এনকোডার
LKMTECH MG4010E-i10-V3 মোটর ২৪ভি ৩২০আরপিএম ২.৫এন.মি প্ল্যানেটারি গিয়ার রিডিউসার ১:১০ RS485/CAN এনকোডার
LKMTECH
পিকআপের উপলভ্যতা লোড করা যায়নি
অভিধান
LKMTECH MG4010E-i10-V3 মোটর একটি ব্রাশলেস মোটর যা একটি প্ল্যানেটারি গিয়ার রিডিউসার এবং আবসোলিউট ম্যাগনেটিক এনকোডার সহ ডিজাইন করা হয়েছে, রোবট এবং অটোমেশন অ্যাকচুয়েটরগুলির জন্য যা উচ্চ নির্ভুলতা, বড় টর্ক এবং স্থিতিশীল ক্লোজড-লুপ নিয়ন্ত্রণের প্রয়োজন। এটি RS485 বা CAN বাস যোগাযোগ সমর্থন করে এবং সুপারিশকৃত DG40E ড্রাইভের সাথে কাজ করে (ইনপুট ভোল্টেজ 7.4-32V)।
মূল বৈশিষ্ট্য
- উচ্চ মানের ডিজাইন; উচ্চ শক্তি, বৃহৎ টর্ক, উচ্চ নির্ভুলতা
- উচ্চ শক্তির ব্রাশলেস মোটর + উচ্চ নির্ভুলতার প্ল্যানেটারি গিয়ার রিডিউসার
- উচ্চ কার্যকারিতা FOC নিয়ন্ত্রণ (ড্রাইভ-সম্পর্কিত বৈশিষ্ট্য)
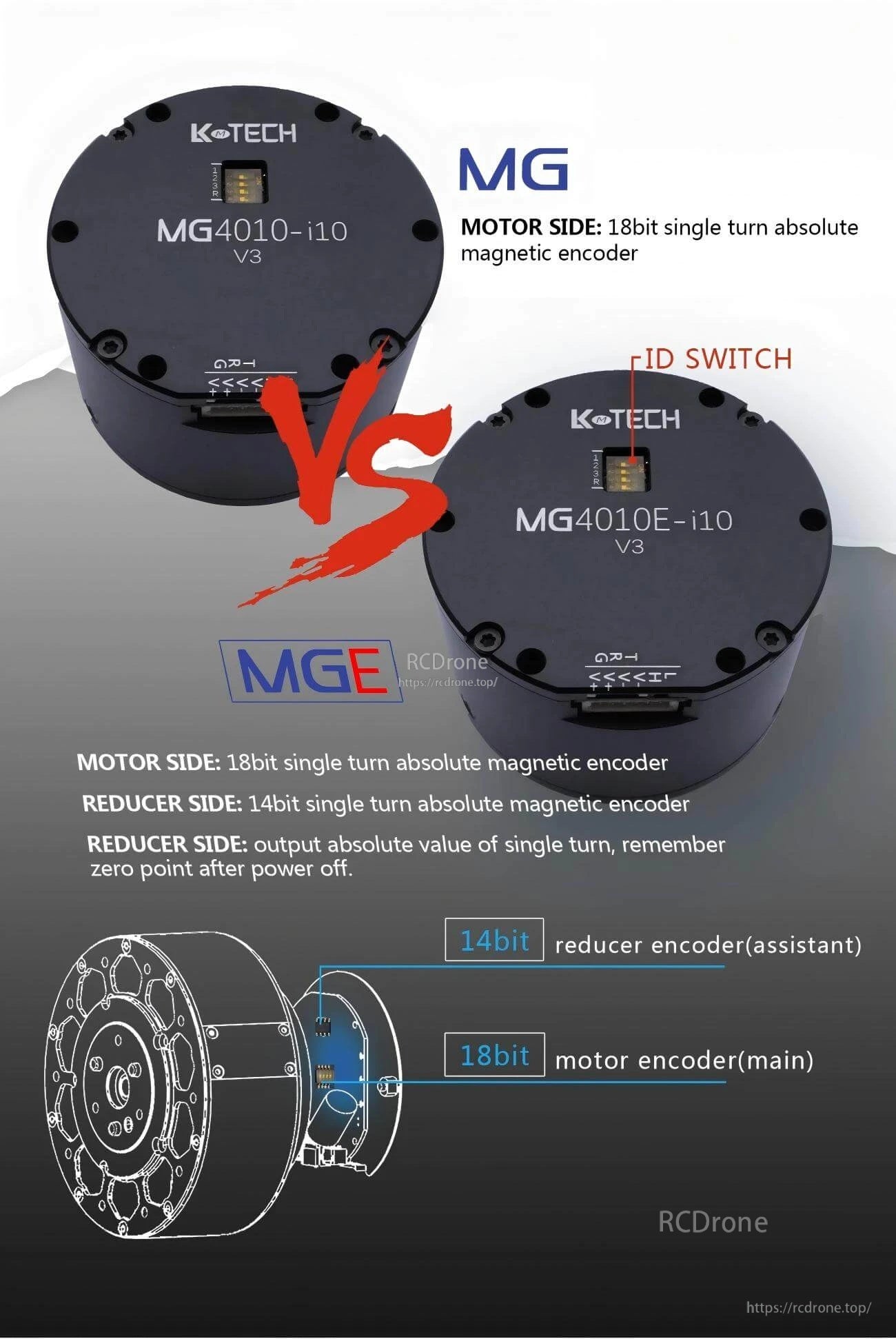
- ডুয়াল এনকোডার; পাওয়ার অফ করার পর শূন্য পয়েন্ট মনে রাখে (একক টার্নের জন্য আবসিক মান আউটপুট)
- মোটর সাইড এনকোডার: ১৮-বিট একক টার্ন আবসিক ম্যাগনেটিক এনকোডার
- রিডিউসার সাইড এনকোডার: ১৪-বিট একক টার্ন আবসিক ম্যাগনেটিক এনকোডার
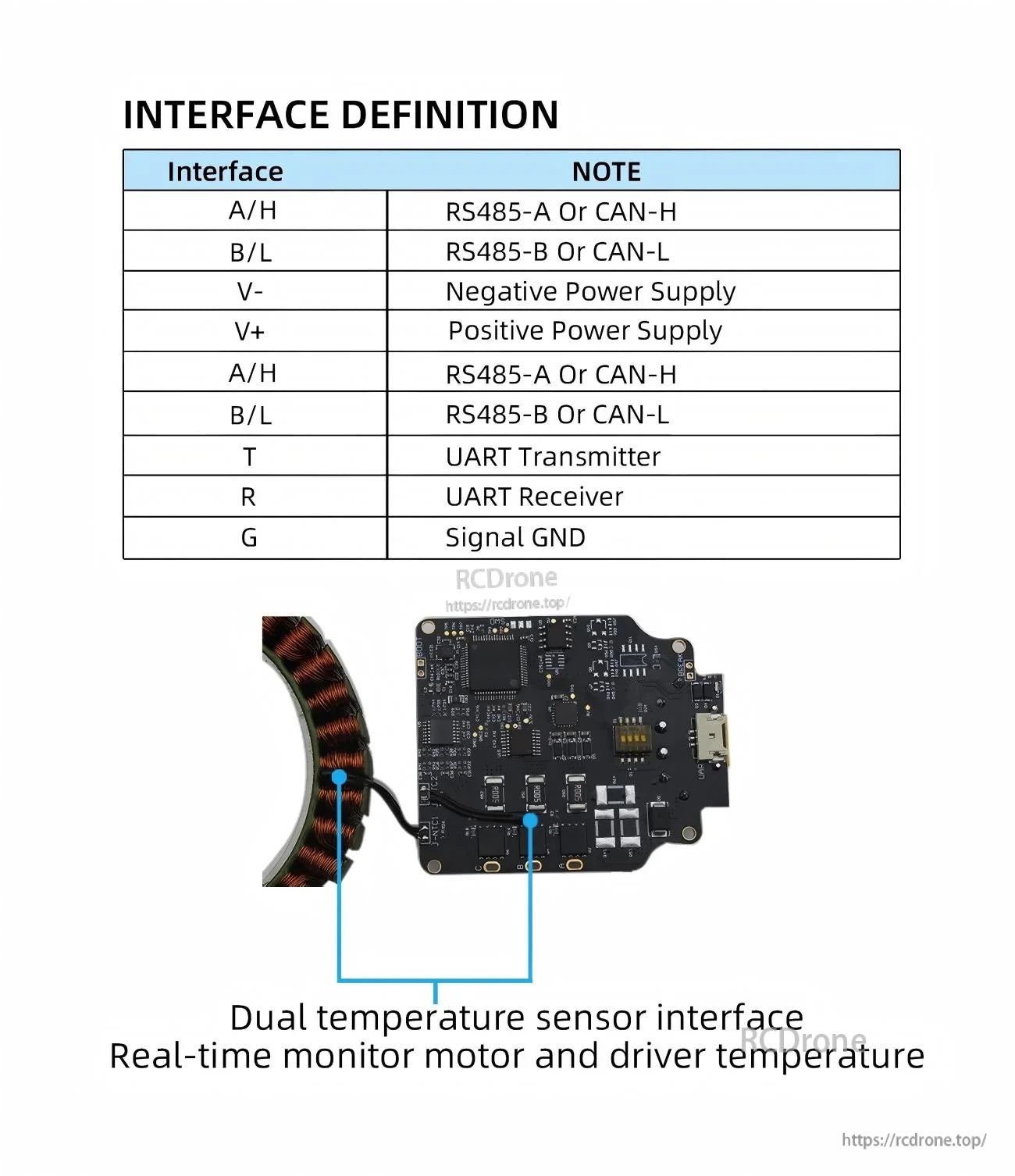
- মোটর এবং ড্রাইভারের তাপমাত্রার রিয়েল-টাইম মনিটরিংয়ের জন্য ডুয়াল তাপমাত্রা সেন্সর ইন্টারফেস (মোটর তাপমাত্রা: হ্যাঁ)
- ID সুইচ (মোটর হাউজিংয়ে প্রদর্শিত)
স্পেসিফিকেশন
| আইটেমের নাম | MG4010E-i10-V3 |
| রেটেড ভোল্টেজ | ২৪V |
| সর্বাধিক গতি | ৩২০RPM |
| রেটেড গতি | ২৬০RPM |
| রেটেড টর্ক | ২।5N.m |
| সর্বাধিক টর্ক | 4.5N.m |
| রেটেড কারেন্ট | 3.5A |
| সর্বাধিক শক্তি | 140W |
| গতি ধ্রুবক | 108.3rpm/V |
| টর্ক ধ্রুবক | 0.07N.m/A |
| ঘূর্ণন | 14 |
| বাঁধাই প্রকার | Y |
| ফেজ প্রতিরোধক | 0.604Ω |
| ফেজ ইন্ডাকট্যান্স | 0.28mH |
| মোটর পোলস | 28 |
| রোটর জড়তা | 202gcm² |
| মোটর তাপমাত্রা | হ্যাঁ |
| রিডিউসার টাইপ | PG4210 |
| হ্রাস অনুপাত | 1:10 |
| ব্যাকল্যাশ | ≤8 আর্কমিন (ছবির টেক্সটও বলে: গিয়ার ব্যাকল্যাশ 6 আর্কমিন) |
| বেয়ারিং রেটেড লোড | 1000N |
| মোটর ওজন | 250g |
| আকার | Φ53*41 |
| প্রস্তাবিত ড্রাইভ | DG40E |
| ড্রাইভ ইনপুট ভোল্টেজ | 7.৪-৩২ভি |
| যোগাযোগ | আরএস৪৮৫ অথবা কান |
| যোগাযোগ ফ্রিকোয়েন্সি | আরএস৪৮৫: 500Hz(115200bps)/কান: 2KHz(1Mbps) |
| এনকোডার | ১৮বিট(মোটর)+১৪বিট(রিডিউসার)ম্যাগনেটিক এনকোডার |
| এনকোডার বাউডরেট (আরএস৪৮৫) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| বাউডরেট (কান) | 100K, 125K, 250K, 500K, 1M |
| নিয়ন্ত্রণ মোড | টর্ক লুপ(24KHz)/স্পিড লুপ(8KHz)/পজিশন লুপ(4KHz) |
| অ্যাক্সেলেশন কার্ভ | ট্রাপিজয়েড অ্যাক্সেলেশন |
ইন্টারফেস সংজ্ঞা
| এ/এইচ | আরএস৪৮৫-এ অথবা কান-এইচ |
| বি/এল | আরএস৪৮৫-বি অথবা কান-এল |
| ভ- | নেগেটিভ পাওয়ার সাপ্লাই |
| ভ+ | পজিটিভ পাওয়ার সাপ্লাই |
| A/H | RS485-A অথবা CAN-H |
| B/L | RS485-B অথবা CAN-L |
| T | UART ট্রান্সমিটার |
| R | UART রিসিভার |
| G | সিগন্যাল GND |
অ্যাপ্লিকেশন দৃশ্যপট
- মানবাকৃতির রোবট
- রোবটিক আর্ম
- এক্সোস্কেলেটন
- চতুষ্পদ রোবট
- AGV যানবাহন / AGV গাড়ি
- ARU রোবট
- রোবট কুকুর
- পরিধানযোগ্য রোবট
ইন্টিগ্রেশন প্রশ্নের জন্য (RS485/CAN সেটিংস, এনকোডার বড রেট নির্বাচন, অথবা ড্রাইভ মেলানো), যোগাযোগ করুন [email protected] or পরিদর্শন করুন https://rcdrone.top/.
ম্যানুয়াল
বিস্তারিত

উচ্চ টর্ক, উচ্চ নির্ভুলতা এবং স্থিতিশীল ক্লোজড-লুপ নিয়ন্ত্রণের প্রয়োজনীয় রোবোটিক অ্যাকচুয়েটরগুলির জন্য নির্মিত।

RS485 বা CAN বাস যোগাযোগ সাধারণ রোবট কন্ট্রোলার এবং ড্রাইভের সাথে নমনীয় সংহতকরণের সমর্থন করে।
ডুয়াল অ্যাবসোলিউট এনকোডার (মোটর + রিডিউসার) পাওয়ার অফ করার পর শূন্য পয়েন্ট ধরে রাখতে সহায়তা করে পুনরাবৃত্তি অবস্থান নির্ধারণের জন্য।
পিন সংজ্ঞাগুলি পাওয়ার তারের সংযোগ এবং সংহতকরণের সময় RS485/CAN যোগাযোগ নির্বাচন করা সহজ করে।

1:10 প্ল্যানেটারি রিডিউসার সংকীর্ণ অ্যাকচুয়েটর স্থানগুলিতে কমপ্যাক্ট টর্ক আউটপুটের জন্য অপ্টিমাইজ করা হয়েছে।
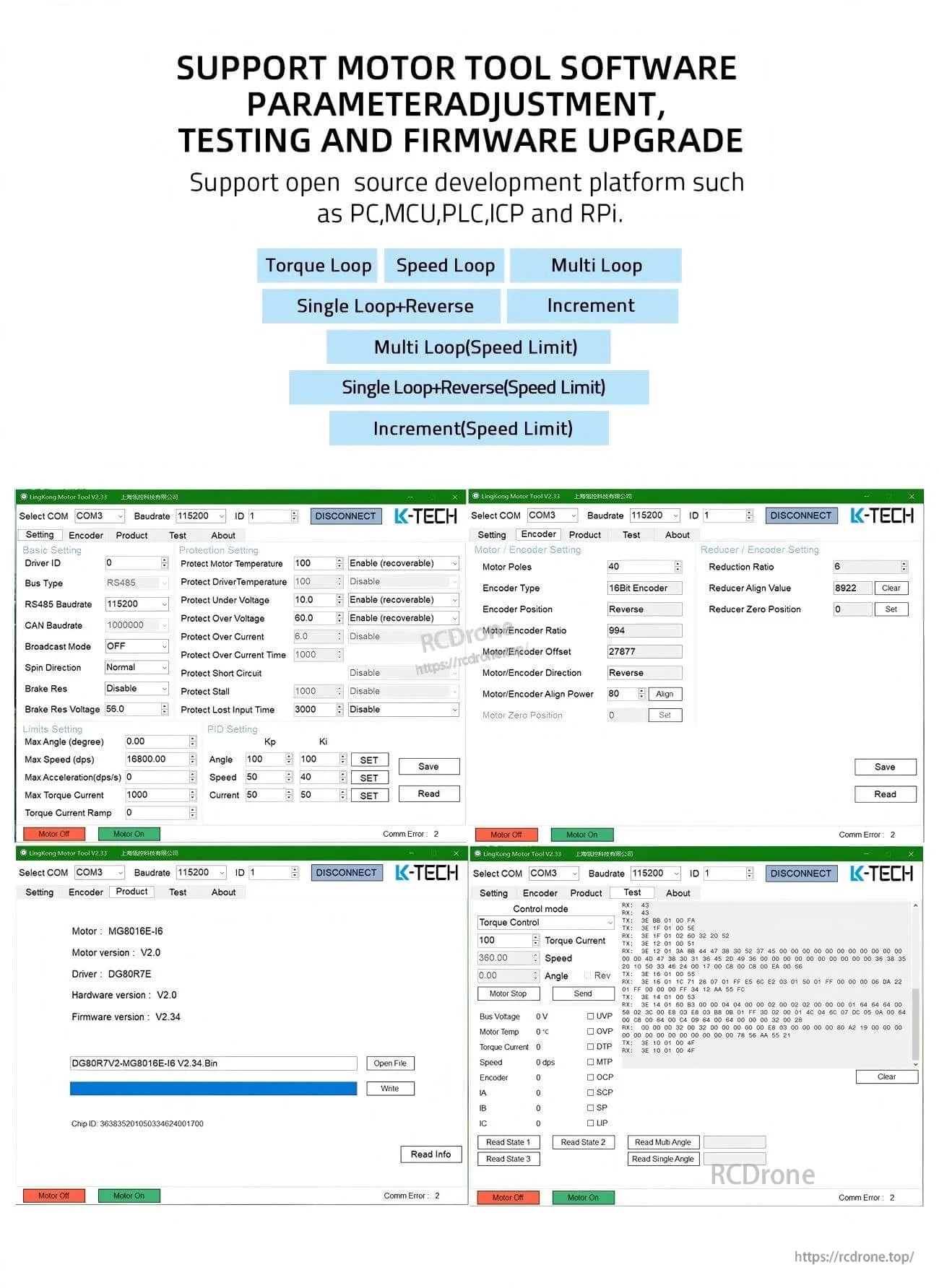
PC টুল সফটওয়্যার প্যারামিটার টিউনিং, কার্যকরী পরীক্ষণ এবং কমিশনিংয়ের সময় ফার্মওয়্যার আপগ্রেড সমর্থন করে।
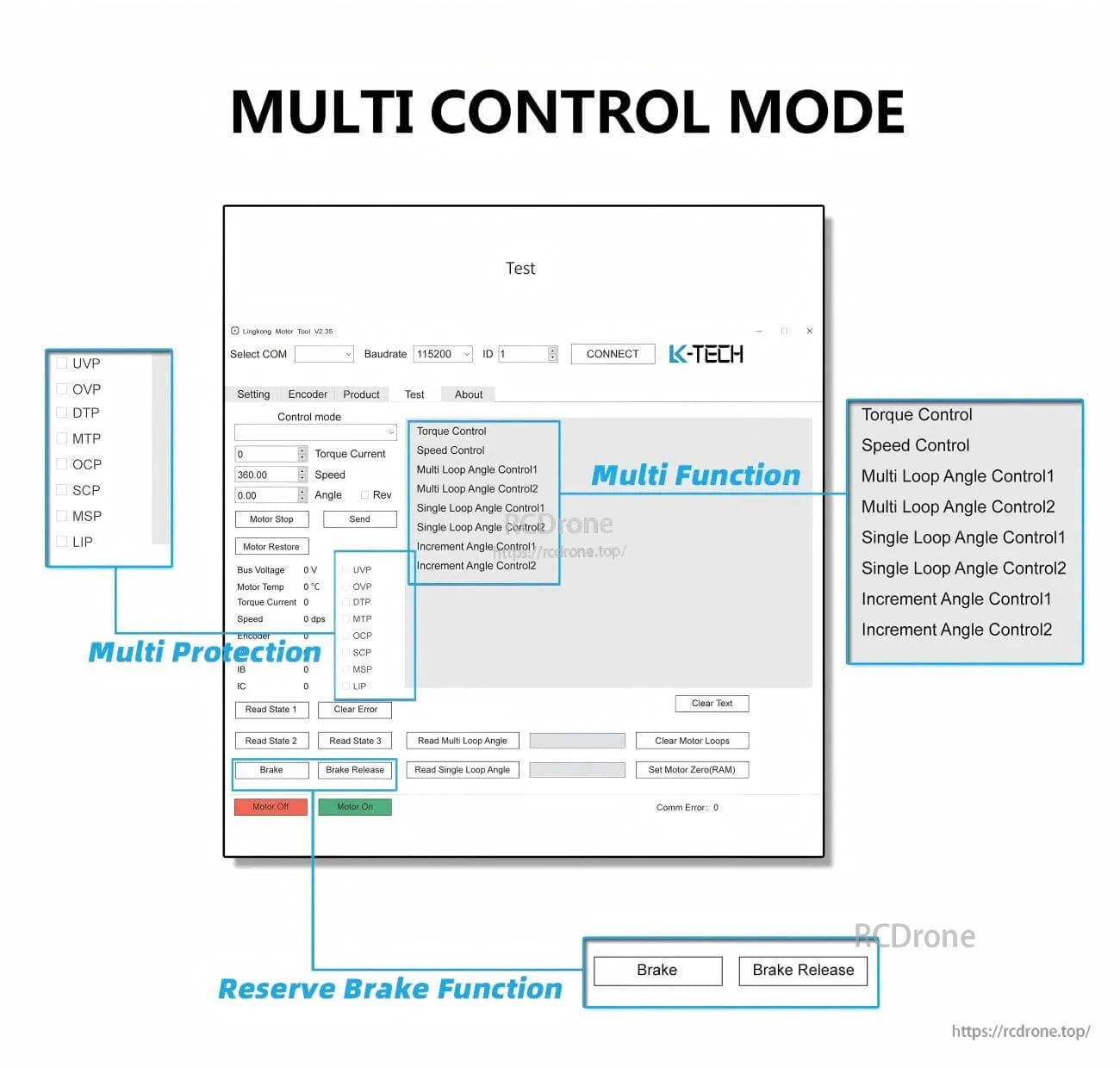
একাধিক নিয়ন্ত্রণ মোড এবং সুরক্ষা বিকল্প টর্ক, গতি এবং অবস্থান লুপ কাজের জন্য সমর্থন করে।
যেখানে সঠিক গিয়ারিং এবং প্রতিক্রিয়া প্রয়োজন, সেগুলির জন্য AGVs, রোবটিক আর্ম, চতুর্ভুজ এবং পরিধানযোগ্য রোবট জয়েন্টগুলির জন্য উপযুক্ত।
Related Collections




