




LKMTECH MG4010E-i36-V3 প্ল্যানেটারি গিয়ার মোটর ২৪ভি ১:৩৬ RS485/CAN ম্যাগনেটিক এনকোডার রোবোটিক্সের জন্য
LKMTECH MG4010E-i36-V3 প্ল্যানেটারি গিয়ার মোটর ২৪ভি ১:৩৬ RS485/CAN ম্যাগনেটিক এনকোডার রোবোটিক্সের জন্য
LKMTECH
পিকআপের উপলভ্যতা লোড করা যায়নি
Overview
এটি LKMTECH MG4010E-i36-V3 মোটর একটি প্ল্যানেটারি গিয়ার মোটর যা রোবোটিক্স এবং মোশন-কন্ট্রোল অ্যাকচুয়েটরের জন্য ডিজাইন করা হয়েছে। এটি একটি ব্রাশলেস মোটর, প্ল্যানেটারি রিডিউসার এবং ম্যাগনেটিক এনকোডারকে একত্রিত করে, যোগাযোগের বিকল্পগুলি RS485 বা CAN হিসাবে তালিকাবদ্ধ।
মূল বৈশিষ্ট্য
- প্ল্যানেটারি গিয়ার মোটর (MG4010E-i36, V3)।
- গিয়ার অনুপাত: 1:36 (এটি “গিয়ার অনুপাত 1:36” হিসাবেও দেখানো হয়েছে)।
- গিয়ার ব্যাকল্যাশ: 7 আর্কমিন (ছবির লেবেল) / 12 আর্কমিন (স্পেসিফিকেশন টেবিল)।
- এনকোডার: 18বিট একক টার্ন অ্যাবসলিউট ম্যাগনেটিক এনকোডার (ছবির টেক্সট); এটি 18বিট (মোটর) + 14বিট (রিডিউসার) ম্যাগনেটিক এনকোডার (স্পেসিফিকেশন টেবিল) হিসাবেও তালিকাবদ্ধ।
- যোগাযোগ: RS485 বা CAN।
- ড্রাইভ/FOC ড্রাইভার উল্লেখ করা হয়েছে (ছবির টেক্সট: “উচ্চ কর্মক্ষমতা FOC ড্রাইভার”)।
- নির্মিত ব্রেক (ছবির টেক্সট/UI লেবেল)।
- হোস্ট প্যারামিটার/পরীক্ষা/ফার্মওয়্যার আপগ্রেড সমর্থিত (ছবির টেক্সট)।
স্পেসিফিকেশন
| আইটেমের নাম | MG4010E-i36-V3 |
| রেটেড ভোল্টেজ | 24V |
| সর্বাধিক গতি | 90RPM |
| রেটেড গতি | 77RPM |
| রেটেড কারেন্ট | 2.4A |
| সর্বাধিক শক্তি | 132W |
| রেটেড টর্ক | 6 N.m (স্পেসিফিকেশন টেবিল) / 9 N.m (ছবির লেবেল) |
| সর্বাধিক টর্ক | 13 N.m (স্পেসিফিকেশন টেবিল) / 18 N.m (ছবির লেবেল) |
| গতি ধ্রুবক | 3 rpm/V |
| টর্ক ধ্রুবক | 2.58 N.m/A |
| টার্ন | 14 |
| ওয়াইন্ডিং টাইপ | Y |
| ফেজ প্রতিরোধক | 0.68 Ω |
| ফেজ ইন্ডাকট্যান্স | 0.২৫ mH |
| মোটর পোল | ২৮ |
| রোটর জড়তা | ১৫৮ gcm² |
| মোটর তাপমাত্রা | হ্যাঁ |
| রিডিউসার টাইপ | PG5336 |
| হ্রাস অনুপাত | ১:৩৬ |
| ব্যাকল্যাশ | ≤১২ আর্কমিন (স্পেসিফিকেশন টেবিল) / ৬ আর্কমিন (ছবির লেবেল) |
| বেয়ারিং রেটেড লোড | ১১২০ N |
| মোটর ওজন | ৩৭৮ g |
| প্রস্তাবিত ড্রাইভ | DG40E |
| ড্রাইভ ইনপুট ভোল্টেজ | ১২-২৪V (স্পেসিফিকেশন টেবিল) / ১২-৬০V (ছবির লেবেল) |
| যোগাযোগ | RS485 অথবা CAN |
| যোগাযোগ ফ্রিকোয়েন্সি | RS485: ৫০০ Hz (১১৫২০০ bps) / CAN: ২ KHz (১ Mbps) |
| এনকোডার | ১৮বিট (মোটর) + ১৪বিট (রিডিউসার) ম্যাগনেটিক এনকোডার |
| এনকোডার বডরেট (আরএস৪৮৫) | ৯৬০০, ১৯২০০, ৫৭৬০০, ১১৫২০০, ২৩০৪০০, ৪০৬৮০০, ১এম, ২ এমবিপিএস |
| বডরেট (ক্যান) | ১০০কে, ১২৫কে, ২৫০কে, ৫০০কে, ১এম |
| নিয়ন্ত্রণ মোড | টর্ক লুপ (২৪ কেজাহার্টজ) / স্পিড লুপ (৮ কেজাহার্টজ) / পজিশন লুপ (৪ কেজাহার্টজ) |
| অ্যাক্সেলেশন কার্ভ | ট্রাপিজয়েড অ্যাক্সেলেশন |
| মোটর সাইজ | Φ ৫৩*৫৪।5 (ছবির লেবেল) |
ইন্টারফেস সংজ্ঞা
- আইডি সুইচ (ছবির লেবেল: “আইডি সুইচ”)।
| পোর্ট | নির্দেশনা |
|---|---|
| এ/এইচ | আরএস485-এ অথবা কান-এইচ |
| বি/এল | আরএস485-বি অথবা কান-এল |
| ভি- | নেগেটিভ পাওয়ার সাপ্লাই |
| ভি+ | পজিটিভ পাওয়ার সাপ্লাই |
| টি | ইউএআরটি ট্রান্সমিটার |
| আর | ইউএআরটি রিসিভার |
| জি | সিগন্যাল জিএনডি |
অ্যাপ্লিকেশন দৃশ্যপট
- মানবাকৃতির রোবট
- রোবটিক আর্ম
- এক্সোস্কেলেটন
- চতুষ্পদ রোবট
- এজিভি যানবাহন / এজিভি গাড়ি
- এআরইউ রোবট
- মেকা কুকুর
- সার্ভিস রোবট
- হ্যান্ডহেল্ড লিডার
- পুনর্বাসন প্রশিক্ষণ রোবট
- পরিদর্শন রোবট
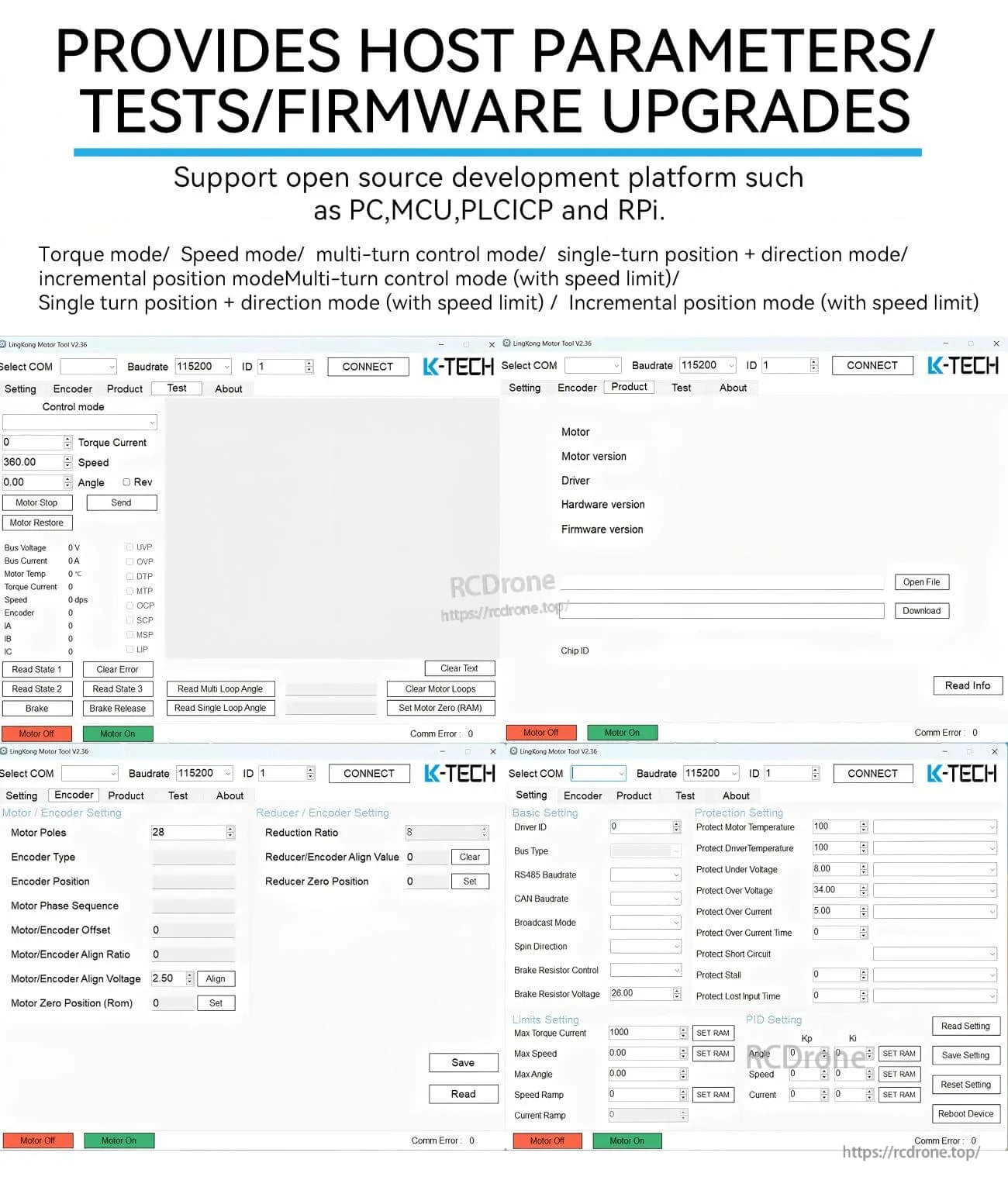
নিয়ন্ত্রণ & সফটওয়্যার নোট
- PC, MCU, PLC, ICP, এবং RPi এর মতো ওপেন সোর্স ডেভেলপমেন্ট প্ল্যাটফর্ম সমর্থন করে।
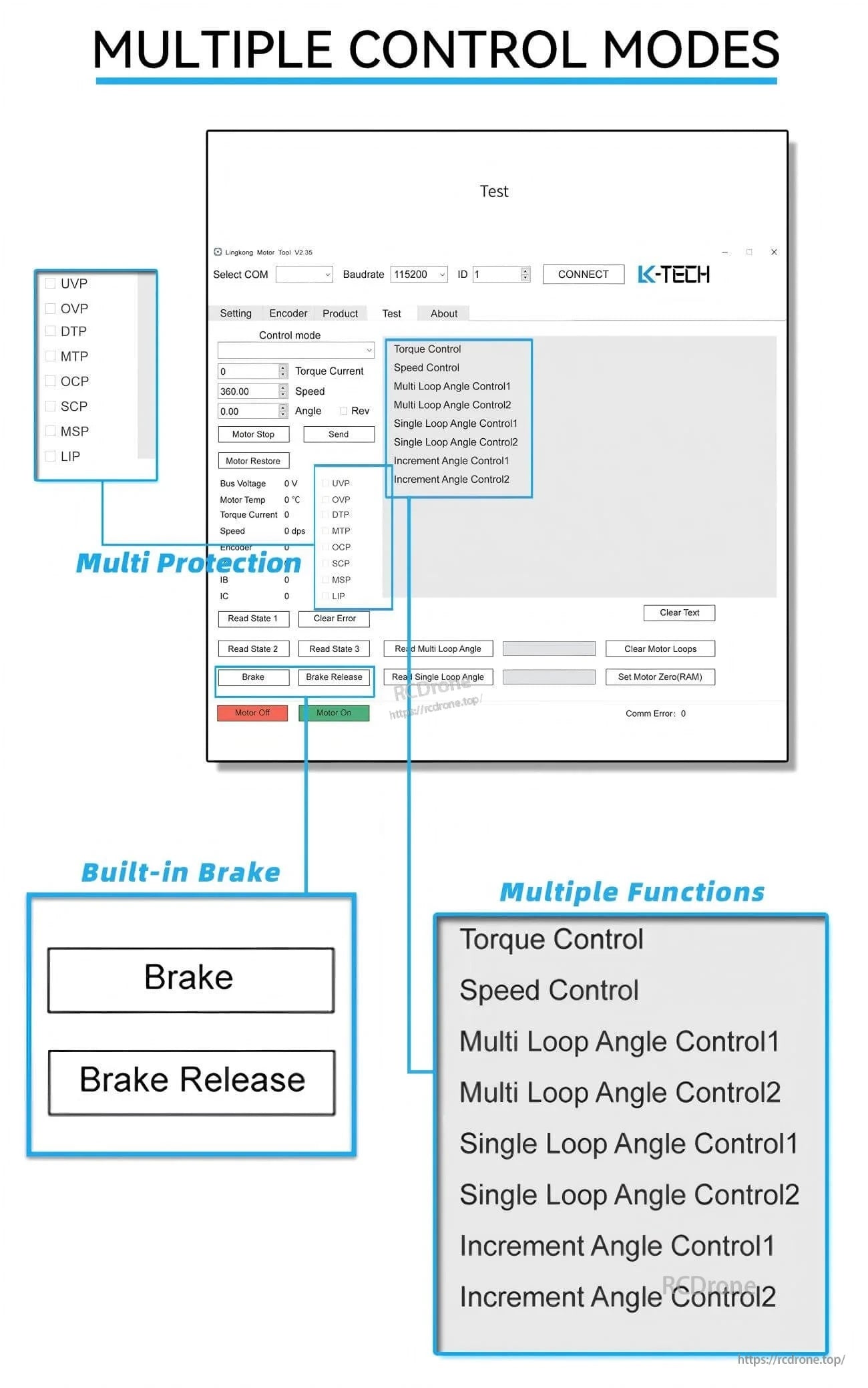
- মোড তালিকাভুক্ত (ছবির টেক্সট): টর্ক মোড, স্পিড মোড, মাল্টি-টার্ন কন্ট্রোল মোড, সিঙ্গল-টার্ন পজিশন + দিক মোড, ইনক্রিমেন্টাল পজিশন মোড; স্পিড লিমিট সহ সংস্করণও প্রদর্শিত হয়।
- UI তে প্রদর্শিত একাধিক কন্ট্রোল মোড: টর্ক কন্ট্রোল, স্পিড কন্ট্রোল, মাল্টি লুপ অ্যাঙ্গেল কন্ট্রোল1, মাল্টি লুপ অ্যাঙ্গেল কন্ট্রোল2, সিঙ্গল লুপ অ্যাঙ্গেল কন্ট্রোল1, সিঙ্গল লুপ অ্যাঙ্গেল কন্ট্রোল2, ইনক্রিমেন্ট অ্যাঙ্গেল কন্ট্রোল1, ইনক্রিমেন্ট অ্যাঙ্গেল কন্ট্রোল2।
- মাল্টি প্রোটেকশন লেবেল প্রদর্শিত: UVP, OVP, DTP, MTP, OCP, SCP, MSP, LIP।
- বিল্ট-ইন ব্রেক কন্ট্রোল প্রদর্শিত: ব্রেক, ব্রেক রিলিজ।
প্রি-সেলস সামঞ্জস্য পরীক্ষা (RS485/CAN ইন্টিগ্রেশন, বাউড রেট নির্বাচন) বা ফাইল অ্যাক্সেস সহায়তার জন্য, যোগাযোগ করুন [email protected] or পরিদর্শন করুন https://rcdrone.top/.
ম্যানুয়াল / ডকুমেন্টস
বিস্তারিত

এমজি4010ই-i36-V3 একটি ব্রাশলেস মোটর, প্ল্যানেটারি রিডিউসার এবং ম্যাগনেটিক এনকোডারকে সংযুক্ত করে কমপ্যাক্ট রোবোটিক অ্যাকচুয়েটরগুলির জন্য।
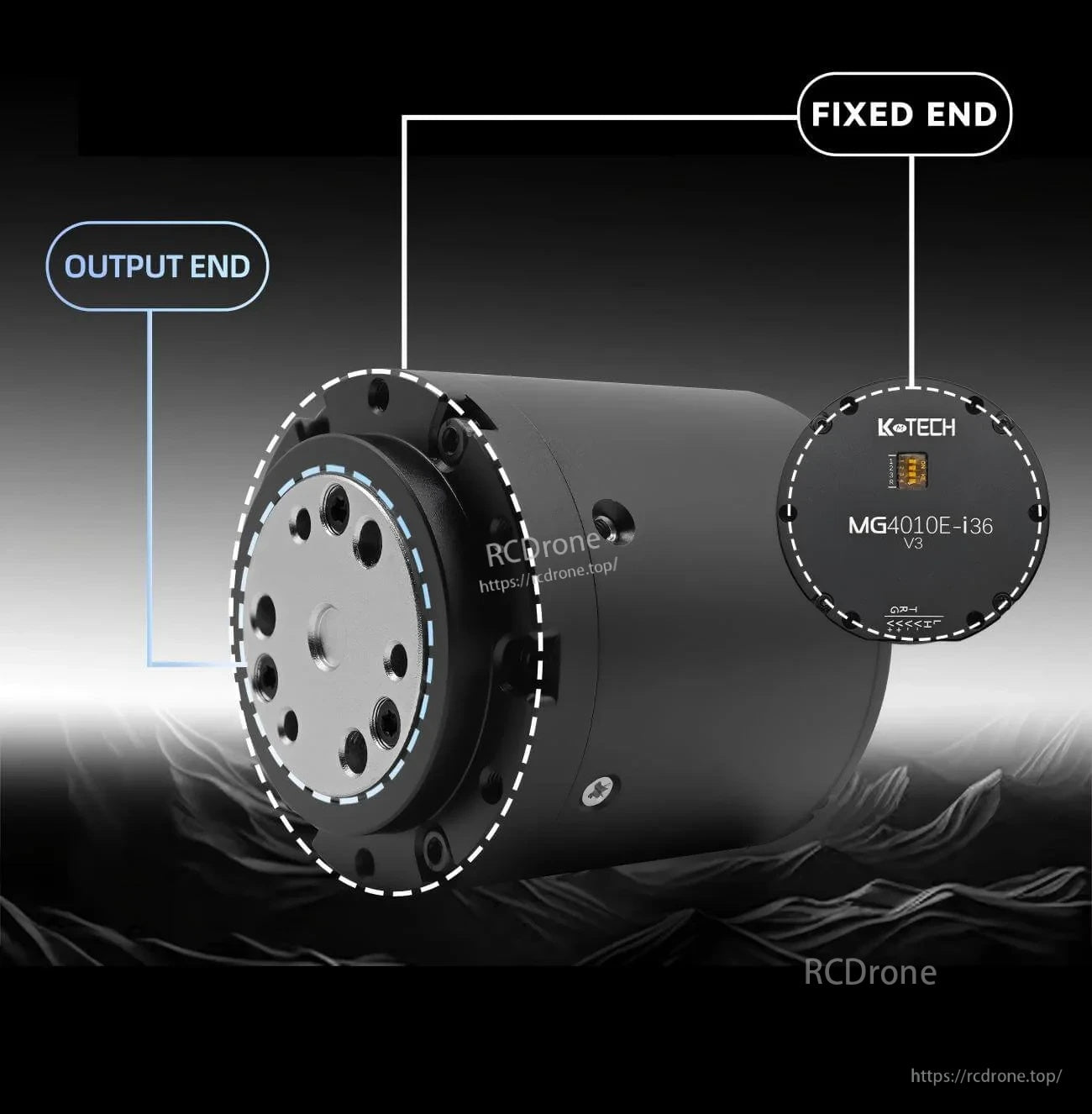
একটি ফ্ল্যাঞ্জ-স্টাইল আউটপুট শেষ এবং স্থির শেষ বিন্যাস বাহু, পা এবং অন্যান্য জয়েন্ট মডিউলে সংহতকরণকে সহজ করে তোলে।

আরএস485 বা কান যোগাযোগ একটি এফওসি ড্রাইভার এবং অ্যাবসোলিউট ম্যাগনেটিক এনকোডার ফিডব্যাকের সাথে যুক্ত হয় স্থিতিশীল টর্ক, গতি এবং অবস্থান নিয়ন্ত্রণের জন্য।
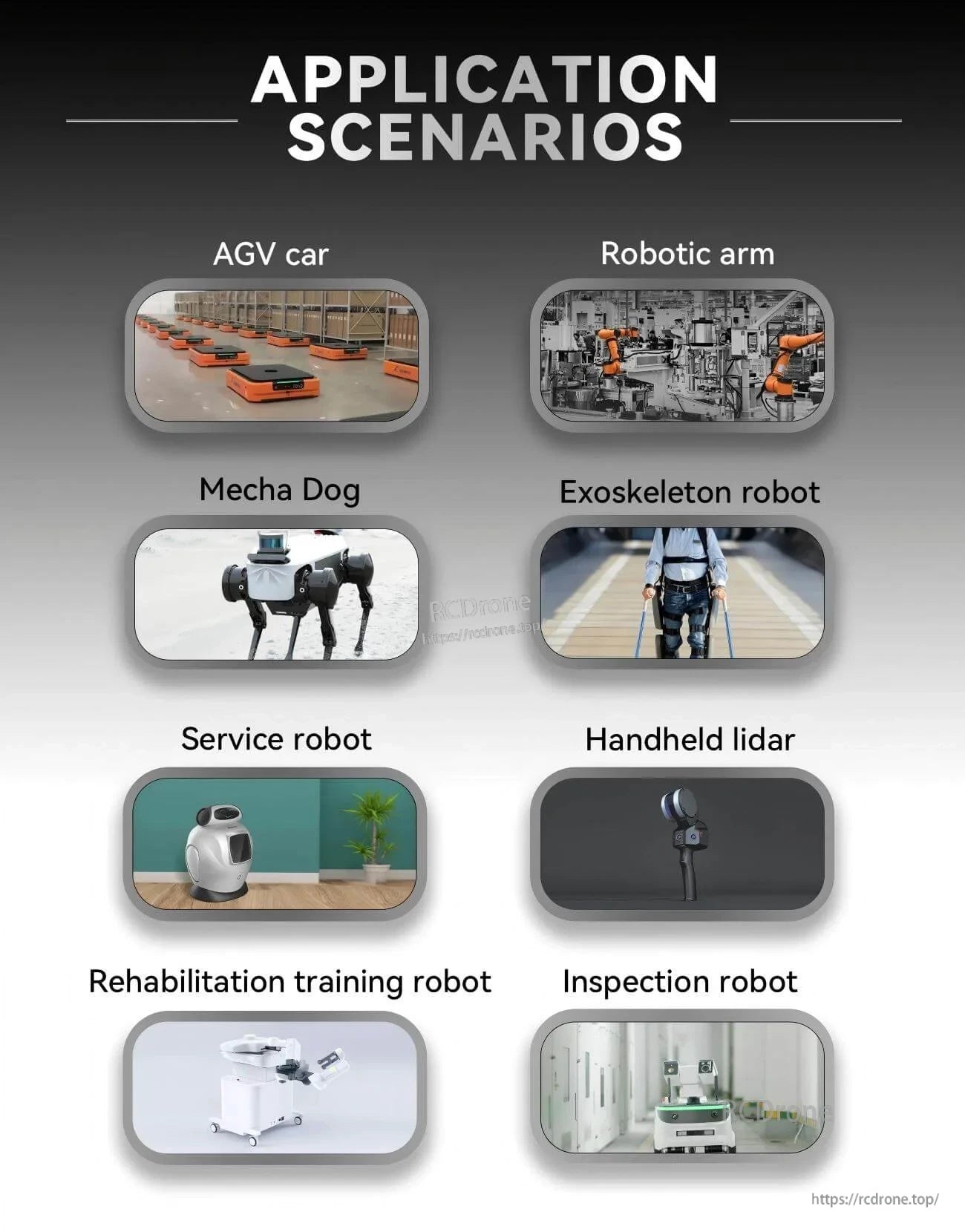
সাধারণ ব্যবহারের ক্ষেত্রে রয়েছে এজিভি, রোবোটিক হাত, চতুর্ভুজ প্ল্যাটফর্ম, এক্সোস্কেলেটন এবং পরিদর্শন বা পরিষেবা রোবট।
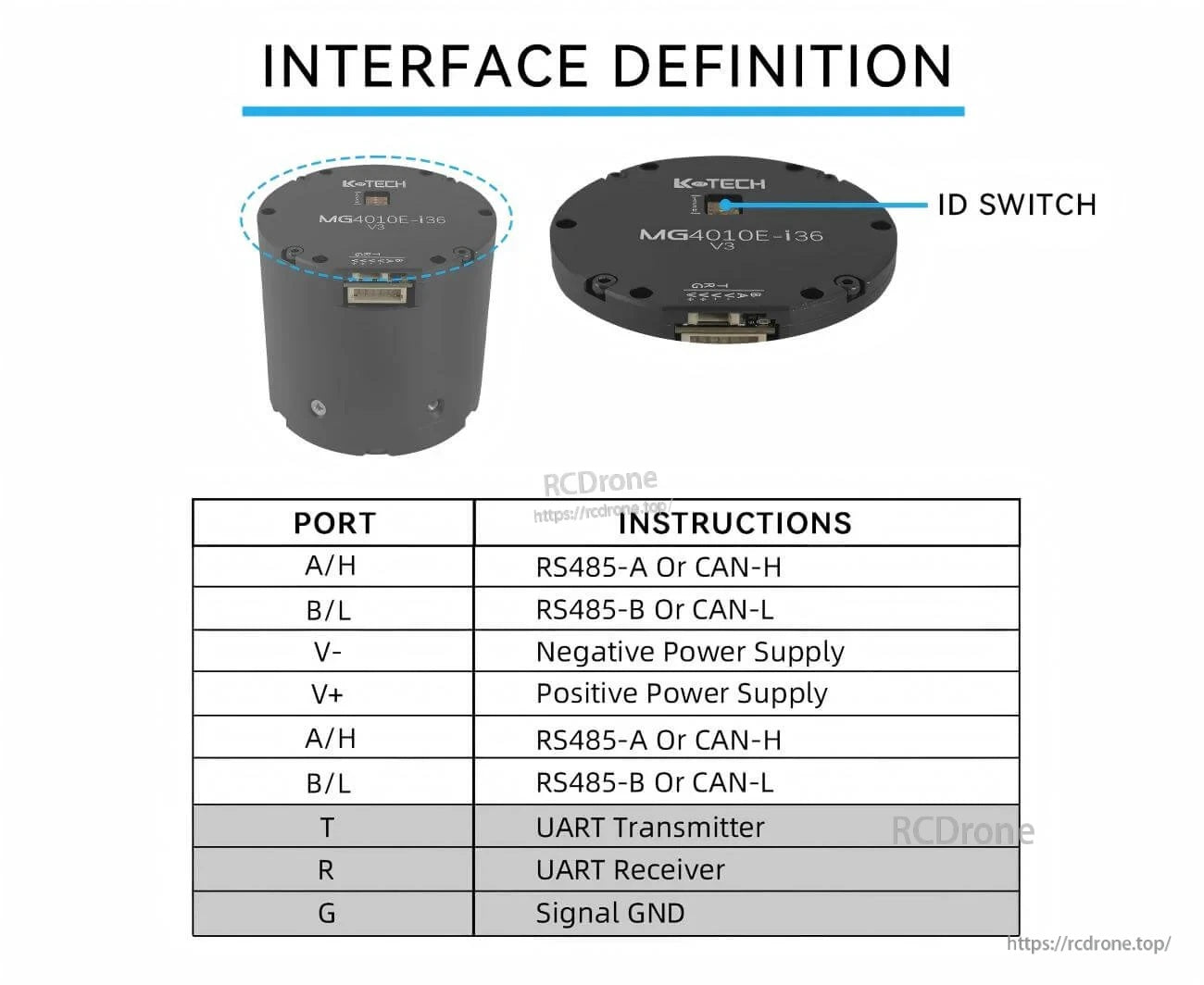
তারের সংযোগকে সহজতর করা হয়েছে লেবেলযুক্ত আরএস485/কান বাস পিন, পাওয়ার সংযোগ, ইউএআরটি Tx/Rx, সিগন্যাল গ্রাউন্ড এবং একটি অনবোর্ড আইডি সুইচ সহ।
নির্মিত ব্রেক নিয়ন্ত্রণ এবং বিভিন্ন অপারেটিং মোড বিভিন্ন গতিশীলতা নিয়ন্ত্রণ কাজ এবং নিরাপত্তা প্রয়োজনীয়তার জন্য আচরণকে সমন্বয় করতে সহায়তা করে।
Related Collections




