




LKMTECH MG6012-i36-V3 মোটর ২৪ভি/৪৮ভি ২৫এন.মি ১:৩৬ প্ল্যানেটারি রিডিউসার, RS485/CAN, ১৮বিট এনকোডার
LKMTECH MG6012-i36-V3 মোটর ২৪ভি/৪৮ভি ২৫এন.মি ১:৩৬ প্ল্যানেটারি রিডিউসার, RS485/CAN, ১৮বিট এনকোডার
LKMTECH
পিকআপের উপলভ্যতা লোড করা যায়নি
Overview
LKMTECH MG6012-i36-V3 মোটর একটি উচ্চ শক্তির ব্রাশলেস মোটর মডিউল যা একটি প্ল্যানেটারি রিডিউসার এবং এনকোডার/ড্রাইভ যোগাযোগ সমর্থন সহ রোবোটিকস মোশন সিস্টেমের জন্য। পণ্যের অবস্থান টেক্সটে অন্তর্ভুক্ত: “পণ্যের ডিজাইনের সর্বোচ্চ মান”, “উচ্চ আউটপুট শক্তি”, “বৃহৎ আউটপুট টর্ক”, এবং “উচ্চ নির্ভুলতা”।
অ্যাপ্লিকেশন দৃশ্যপট
- মানবাকৃতির রোবট
- রোবটিক হাত
- এক্সোস্কেলেটন
- চতুর্ভুজ রোবট
- এজিভি যানবাহন / এজিভি গাড়ি
- এআরইউ রোবট
- রোবট কুকুর
- পরিধানযোগ্য রোবট
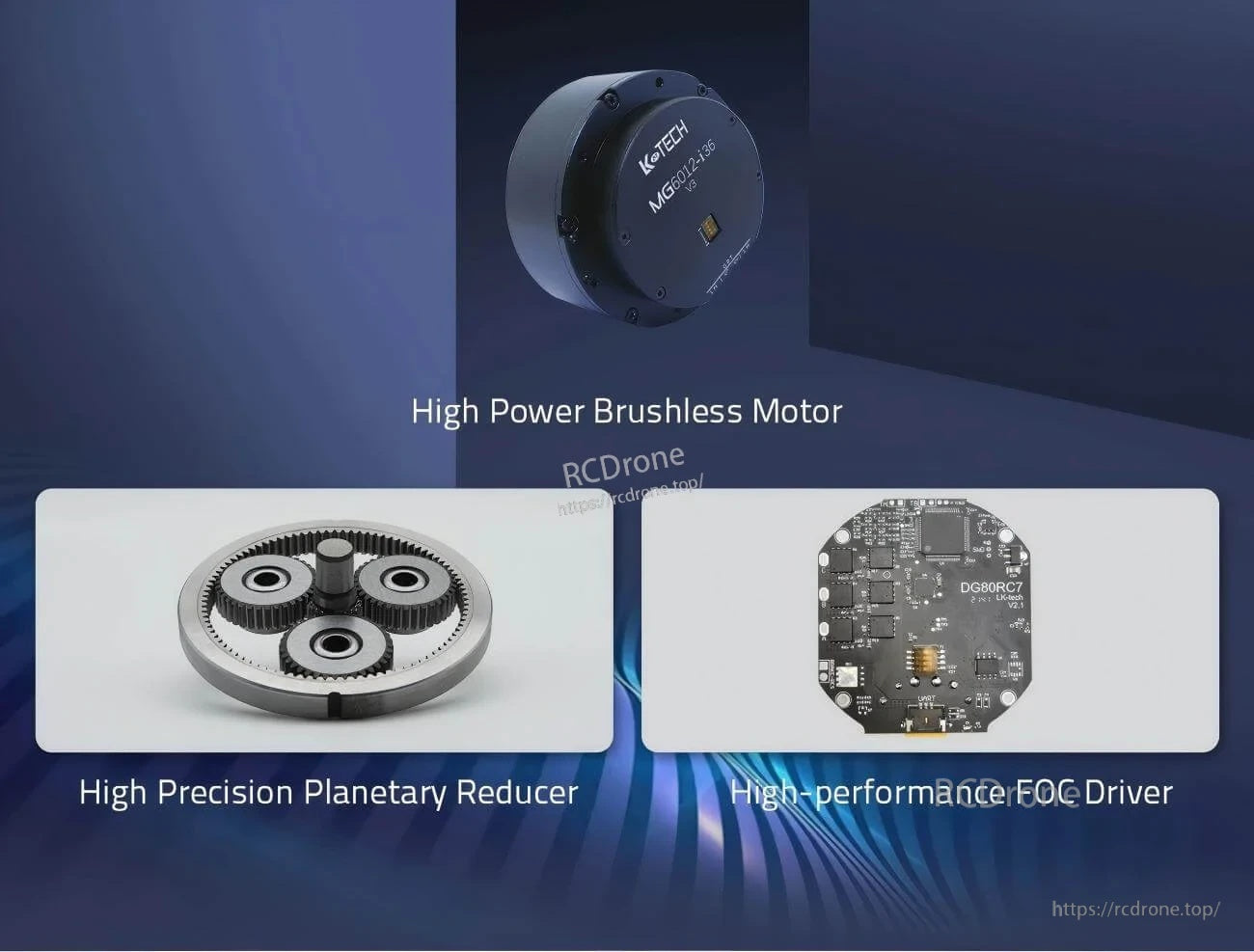
মূল বৈশিষ্ট্য
- উচ্চ শক্তির ব্রাশলেস মোটর
- উচ্চ নির্ভুলতা প্ল্যানেটারি রিডিউসার
- উচ্চ-কার্যকরী এফওসি ড্রাইভার (পাঠ রেফারেন্স)
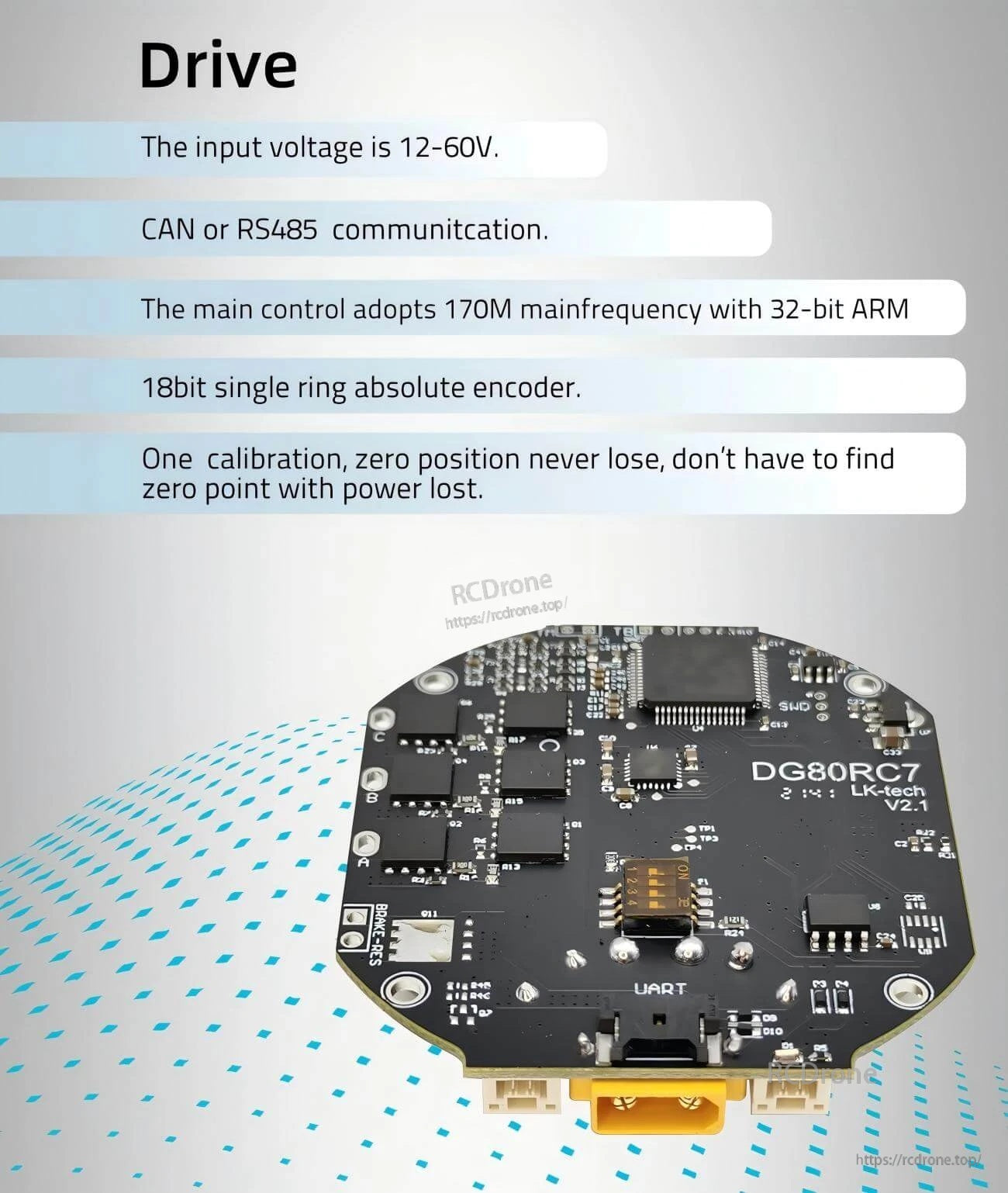
- ড্রাইভ ইনপুট ভোল্টেজ: 12-60V
- যোগাযোগ: CAN বা RS485
- মেইন কন্ট্রোল: 170M প্রধান ফ্রিকোয়েন্সি 32-বিট ARM সহ (পাঠ রেফারেন্স)
- এনকোডার: 18বিট একক রিং অ্যাবসলিউট এনকোডার / 18বিট চৌম্বক এনকোডার (দুইটি উল্লেখিত)
- “একটি ক্যালিব্রেশন, শূন্য অবস্থান কখনও হারায় না, পাওয়ার হারানোর সাথে শূন্য পয়েন্ট খুঁজে বের করার প্রয়োজন নেই।” (উল্লেখিত)
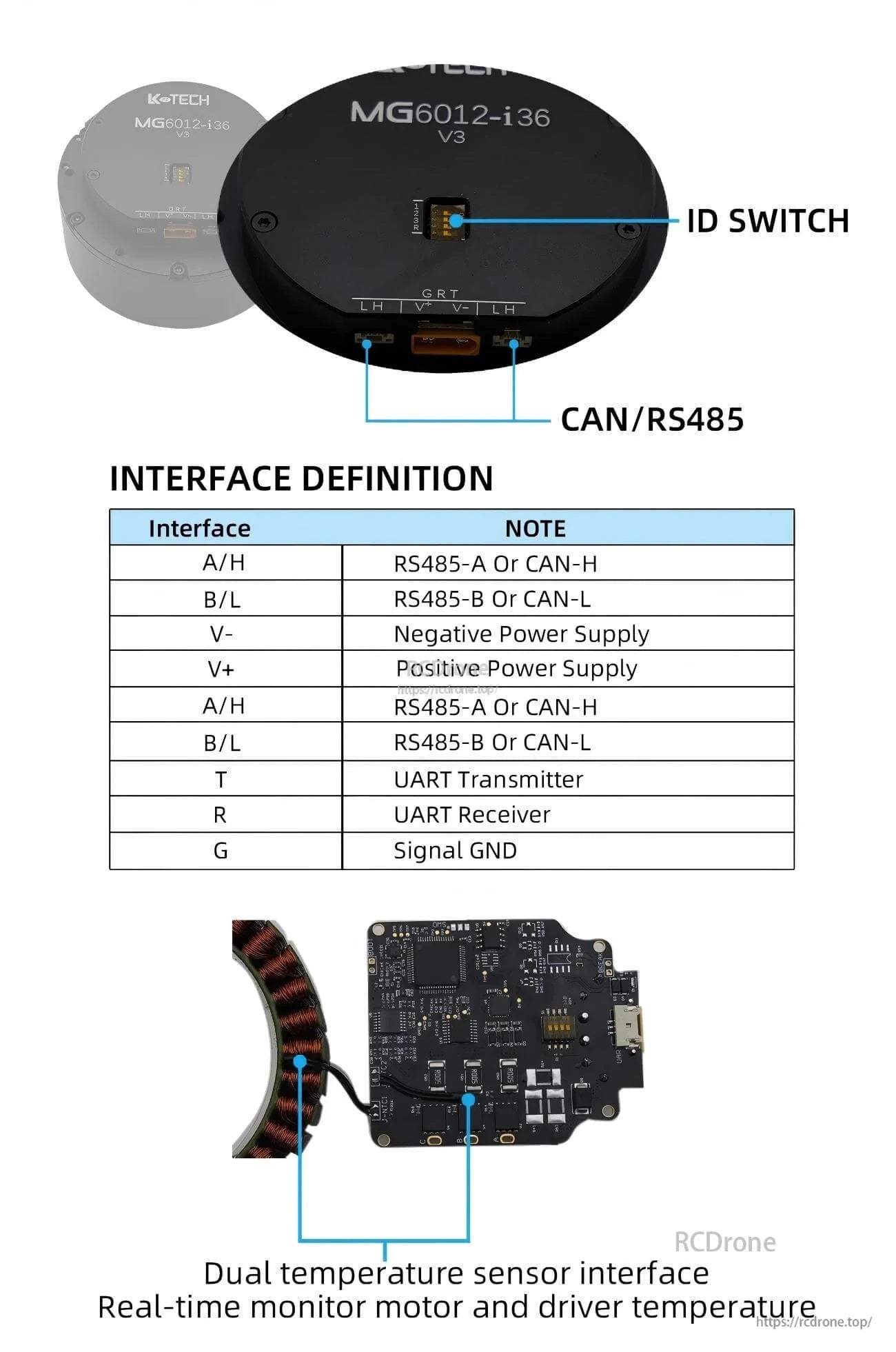
- আইডি সুইচ (উল্লেখিত)
- ডুয়াল তাপমাত্রা সেন্সর ইন্টারফেস; বাস্তব সময়ে মোটর এবং ড্রাইভারের তাপমাত্রা পর্যবেক্ষণ (উল্লেখিত)
বিশেষ উল্লেখ
| প্যারামিটার | 24V সংস্করণ | 48V সংস্করণ |
|---|---|---|
| আইটেমের নাম | MG6012-i36-V3 | MG6012-i36-V3 |
| রেটেড ভোল্টেজ | 24V | 48V |
| সর্বাধিক গতি | 45RPM | 88RPM |
| রেটেড টর্ক | 25N.m | 25N.m |
| রেটেড গতি | 45RPM | 74RPM |
| রেটেড কারেন্ট | 4A | 4.8A |
| সর্বাধিক শক্তি | 140W | 500W |
| সর্বাধিক টর্ক | 40N.m | 40N. |
| গতি ধ্রুবক | 67rpm/V | 67rpm/V |
| টর্ক ধ্রুবক | 0.175N.m/A | 0.146N.m/A |
| ঘূর্ণন | 15 | 15 |
| বাঁধাই প্রকার | Y | Y |
| ফেজ প্রতিরোধ | 0.63Ω | 0.63Ω |
| ফেজ ইন্ডাকট্যান্স | 0.28mH | 0.28mH |
| মোটর পোল | 28 | 28 |
| রোটর জড়তা | 930 | 908 |
| মোটর তাপমাত্রা | হ্যাঁ | হ্যাঁ |
| রিডিউসার টাইপ | PG4136 | PG4136 |
| হ্রাস অনুপাত | 1:36 | 1:36 |
| ব্যাকল্যাশ | ≤12 আর্কমিন | ≤12 আর্কমিন |
| বেয়ারিং রেটেড লোড | 1770N | 1770N |
| মোটর ওজন | 503g | 503g |
| প্রস্তাবিত ড্রাইভ | DG60 | DG60 |
| ড্রাইভ ইনপুট ভোল্টেজ | 12-60V | 12-60V |
| যোগাযোগ | RS485 অথবা CAN | RS485 অথবা CAN | যোগাযোগ ফ্রিকোয়েন্সি | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| এনকোডার | 18বিট ম্যাগনেটিক এনকোডার | 18বিট ম্যাগনেটিক এনকোডার |
| এনকোডার বডরেট (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| বডরেট (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| নিয়ন্ত্রণ মোড | টর্ক লুপ(32KHz)/স্পিড লুপ(8KHz)/পজিশন লুপ(4KHz) | টর্ক লুপ(32KHz)/স্পিড লুপ(8KHz)/পজিশন লুপ(4KHz) |
| অ্যাক্সেলেশন কার্ভ | ট্রাপিজয়েড অ্যাক্সেলেশন | ট্রাপিজয়েড অ্যাক্সেলেশন |
ইন্টারফেস সংজ্ঞা
CAN/RS485 এবং ID সুইচ প্রদান করা হয়েছে (উল্লেখিত)।Interface নোট:
| ইন্টারফেস | নোট |
|---|---|
| A/H | RS485-A অথবা CAN-H |
| B/L | RS485-B অথবা CAN-L |
| V- | নেগেটিভ পাওয়ার সাপ্লাই |
| V+ | পজিটিভ পাওয়ার সাপ্লাই |
| T | UART ট্রান্সমিটার |
| R | UART রিসিভার |
| G | সিগন্যাল GND |
ম্যানুয়াল / ডকুমেন্টস
ইন্টিগ্রেশন প্রশ্নের জন্য (CAN/RS485 সেটআপ, বাউড রেট নির্বাচন, অথবা কন্ট্রোলার জোড়া), যোগাযোগ করুন [email protected] or পরিদর্শন করুন https://rcdrone.top/.
বিস্তারিত

MG6012-i36-V3 একটি ব্রাশলেস মোটর, প্ল্যানেটারি রিডিউসার এবং রোবোটিক জয়েন্টের জন্য এনকোডার যোগাযোগ একত্রিত করে।
 একটি কমপ্যাক্ট ড্রাইভ সিস্টেম যা একটি উচ্চ-শক্তির মোটর কোর, সঠিক প্ল্যানেটারি রিডাকশন এবং একটি FOC ড্রাইভারের চারপাশে নির্মিত।
একটি কমপ্যাক্ট ড্রাইভ সিস্টেম যা একটি উচ্চ-শক্তির মোটর কোর, সঠিক প্ল্যানেটারি রিডাকশন এবং একটি FOC ড্রাইভারের চারপাশে নির্মিত।
কন্ট্রোলার ইলেকট্রনিক্স 12–60V ইনপুট সমর্থন করে CAN বা RS485 যোগাযোগের সাথে এবং একটি 18-বিট অ্যাবসোলিউট এনকোডার অপশন।
স্পষ্ট পিন সংজ্ঞা এবং একটি অনবোর্ড ID সুইচ তারের কাজ এবং মাল্টি-নোড CAN/RS485 সেটআপ সহজ করতে সহায়তা করে।

1:36 প্ল্যানেটারি রিডিউসারটি কম ব্যাকল্যাশ এবং উচ্চ টর্ক আউটপুটের জন্য ডিজাইন করা হয়েছে সঠিক গতির সমাবেশে।
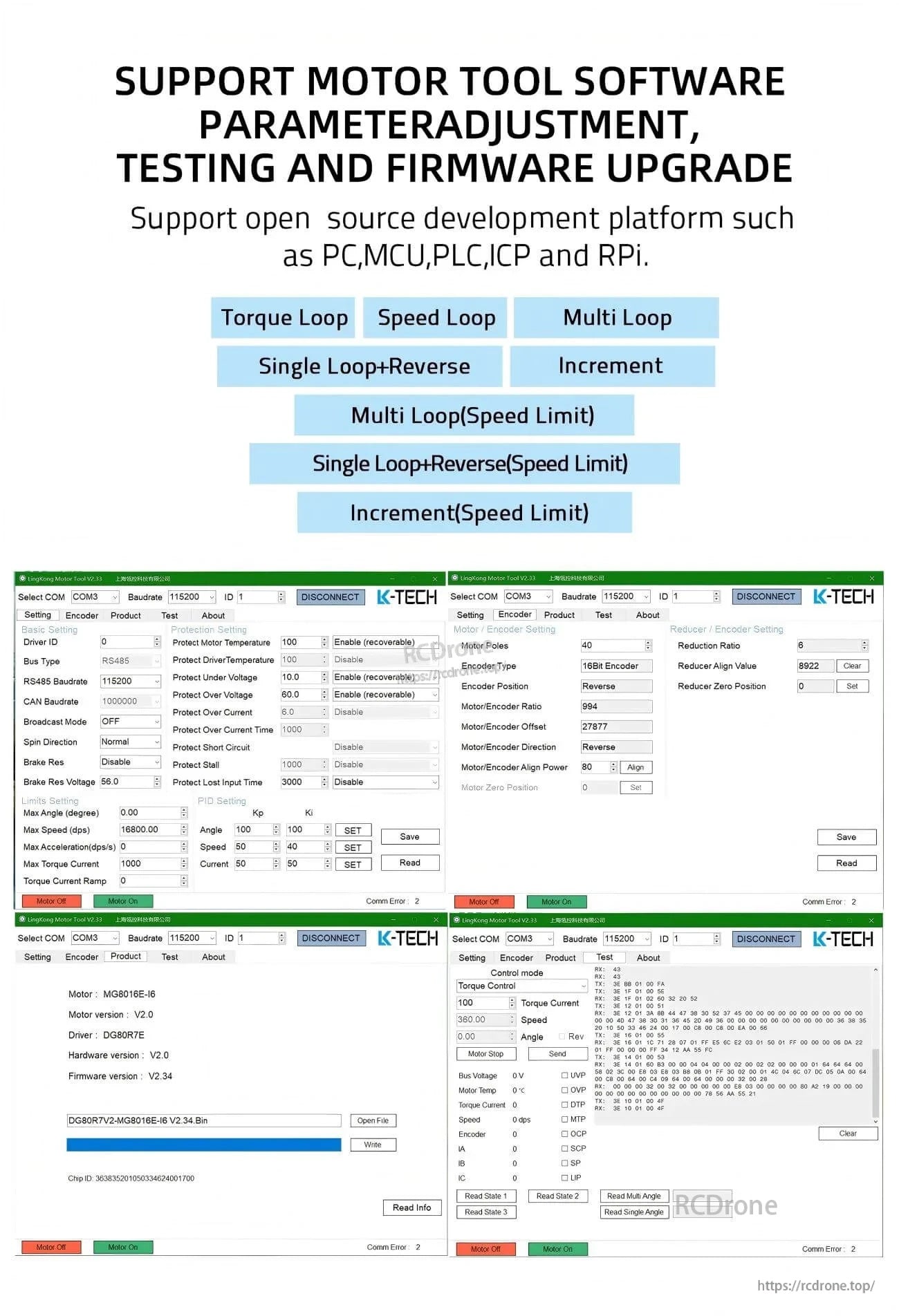
কনফিগারেশন সফটওয়্যার প্যারামিটার টিউনিং, লুপ মোড টেস্টিং এবং সাধারণ ডেভ প্ল্যাটফর্মে ফার্মওয়্যার আপগ্রেড সমর্থন করে।
রোবোটিক অ্যাপ্লিকেশন যেমন AGVs, রোবোটিক আর্ম, চতুর্ভুজ এবং পরিধানযোগ্য/এক্সোস্কেলেটন মেকানিজমের জন্য উপযুক্ত।
Related Collections




