




LKMTECH MG6012E-i8B-V3 মোটর ৪৮V প্ল্যানেটারি গিয়ার মোটর ১:৮ ব্রেক RS485/CAN ম্যাগনেটিক এনকোডার
LKMTECH MG6012E-i8B-V3 মোটর ৪৮V প্ল্যানেটারি গিয়ার মোটর ১:৮ ব্রেক RS485/CAN ম্যাগনেটিক এনকোডার
LKMTECH
পিকআপের উপলভ্যতা লোড করা যায়নি
অভিধান
এটি LKMTECH MG6012E-i8B-V3 মোটর একটি দুই-পর্যায়ের প্ল্যানেটারি গিয়ার মোটর যা ব্রেক সহ, রোবোটিক্স এবং অটোমেশন অ্যাকচুয়েটরগুলির জন্য ডিজাইন করা হয়েছে যা কমপ্যাক্ট আকার, উচ্চ টর্ক আউটপুট এবং ডিজিটাল যোগাযোগের প্রয়োজন।
মূল বৈশিষ্ট্য
- ব্রেক সহ দুই-স্তরের প্ল্যানেটারি গিয়ার মোটর
- গিয়ার অনুপাত: 1:8
- গিয়ার ব্যাকল্যাশ: আর্কমিন (ছবির টেক্সট); 6 আর্কমিন (স্পেসিফিকেশন)
- মোটরের আকার: 80*60
- 18-বিট একক-টার্ন অ্যাবসোলিউট ম্যাগনেটিক এনকোডার (ছবির টেক্সট)
- এনকোডার কনফিগারেশন: 18বিট (মোটর) + 14বিট (রিডিউসার) ম্যাগনেটিক এনকোডার
- যোগাযোগ: RS485 অথবা CAN
- প্রস্তাবিত ড্রাইভ: DG60Ev2; ড্রাইভ ইনপুট ভোল্টেজ: 12-60V
- ডুয়াল এনকোডার, পাওয়ার অফ করার পর জিরো পয়েন্ট মনে রাখে (ছবির টেক্সট)
- PC, MCU, PLC, ICP এবং RPi এর মতো ওপেন সোর্স ডেভেলপমেন্ট প্ল্যাটফর্ম সমর্থন করে (ছবির টেক্সট)
- নিয়ন্ত্রণ মোড (স্পেসিফিকেশন): টর্ক লুপ (32KHz) / স্পিড লুপ (8KHz) / পজিশন লুপ (4KHz)
- এক্সিলারেশন কার্ভ: ট্র্যাপিজয়েড এক্সিলারেশন
নির্বাচন নির্দেশিকা বা ইন্টিগ্রেশন সমর্থনের জন্য, যোগাযোগ করুন [email protected] or পরিদর্শন করুন https://rcdrone.top/.
স্পেসিফিকেশন
| আইটেমের নাম | MG6012E-i8B-V3 |
| রেটেড ভোল্টেজ | 48V |
| সর্বাধিক গতি | 310RPM |
| রেটেড গতি | 256RPM |
| রেটেড টর্ক | 6N.m |
| সর্বাধিক টর্ক | 16N.m |
| রেটেড কারেন্ট | 3.5A |
| সর্বাধিক পাওয়ার | 294W |
| গতি ধ্রুবক | 42.7rpm/V |
| টর্ক ধ্রুবক | 1.09N.m/A |
| টার্নস | 20 |
| ওয়াইন্ডিং টাইপ | Y |
| ফেজ রেজিস্ট্যান্স | 1.3 |
| ফেজ ইন্ডাকট্যান্স | 0.55mH |
| মোটর পোল | 28 |
| রোটর জড়তা | 930gcm2 |
| মোটর তাপমাত্রা | হ্যাঁ |
| রিডিউসার টাইপ | PG4108 |
| হ্রাস অনুপাত | 1:8 |
| ব্যাকল্যাশ | 6 আর্কমিন |
| বেয়ারিং রেটেড লোড | 1800N |
| মোটর ওজন | 718g |
| ব্রেক টাইপ | MT15 |
| ব্রেক টর্ক | 1.5N.m |
| স্টার্টআপ ভোল্টেজ | 24V |
| স্টার্টআপ পাওয়ার | 17.5W |
| স্থায়ী ভোল্টেজ | 7V |
| স্থায়ী পাওয়ার | 1.5W |
| প্রস্তাবিত ড্রাইভ | DG60Ev2 |
| ড্রাইভ ইনপুট ভোল্টেজ | 12-60V |
| যোগাযোগ | RS485 অথবা CAN |
| যোগাযোগ ফ্রিকোয়েন্সি | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| এনকোডার | 18বিট(মোটর)+14বিট(রিডিউসার)ম্যাগনেটিক এনকোডার |
| এনকোডার বাউডরেট (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| বাউডরেট (CAN) | 100K, 125K, 250K, 500K, 1M |
| নিয়ন্ত্রণ মোড | টর্ক লুপ(32KHz)/স্পিড লুপ(8KHz)/পজিশন লুপ(4KHz) |
| অ্যাক্সিলারেশন কার্ভ | ট্রাপিজয়েড অ্যাক্সিলারেশন |
ইন্টারফেস সংজ্ঞা (ছবি টেক্সট)
- ID সুইচ
- নেগেটিভ পাওয়ার সাপ্লাই
- পজিটিভ পাওয়ার সাপ্লাই
- CAN / RS485 (LH) (AB)
| পোর্ট | নির্দেশনা |
|---|---|
| A/H | RS485-A অথবা CAN-H |
| B/L | RS485-B অথবা CAN-L |
| V- | নেগেটিভ পাওয়ার সাপ্লাই |
| V+ | পজিটিভ পাওয়ার সাপ্লাই |
| A/H | RS485-A অথবা CAN-H |
| B/L | RS485-B অথবা CAN-L |
| T | UART ট্রান্সমিটার |
| R | UART রিসিভার |
| G | সিগন্যাল GND |
অ্যাপ্লিকেশন
- মানবাকৃতির রোবট
- রোবোটিক হাত
- এক্সোস্কেলেটন
- চতুর্ভুজ রোবট
- AGV যানবাহন / AGV গাড়ি
- ARU রোবট
- মেকা ডগ
- সার্ভিস রোবট
- হ্যান্ডহেল্ড লিডার
- পুনর্বাসন প্রশিক্ষণ রোবট
- পরিদর্শন রোবট
ম্যানুয়াল
বিস্তারিত

একটি কমপ্যাক্ট দুই-পর্যায়ের প্ল্যানেটারি গিয়ার মোটর যা রোবোটিক্স অ্যাকচুয়েটরের জন্য ব্রেক সহ, যেখানে উচ্চ টর্ক এবং ছোট আকার গুরুত্বপূর্ণ।
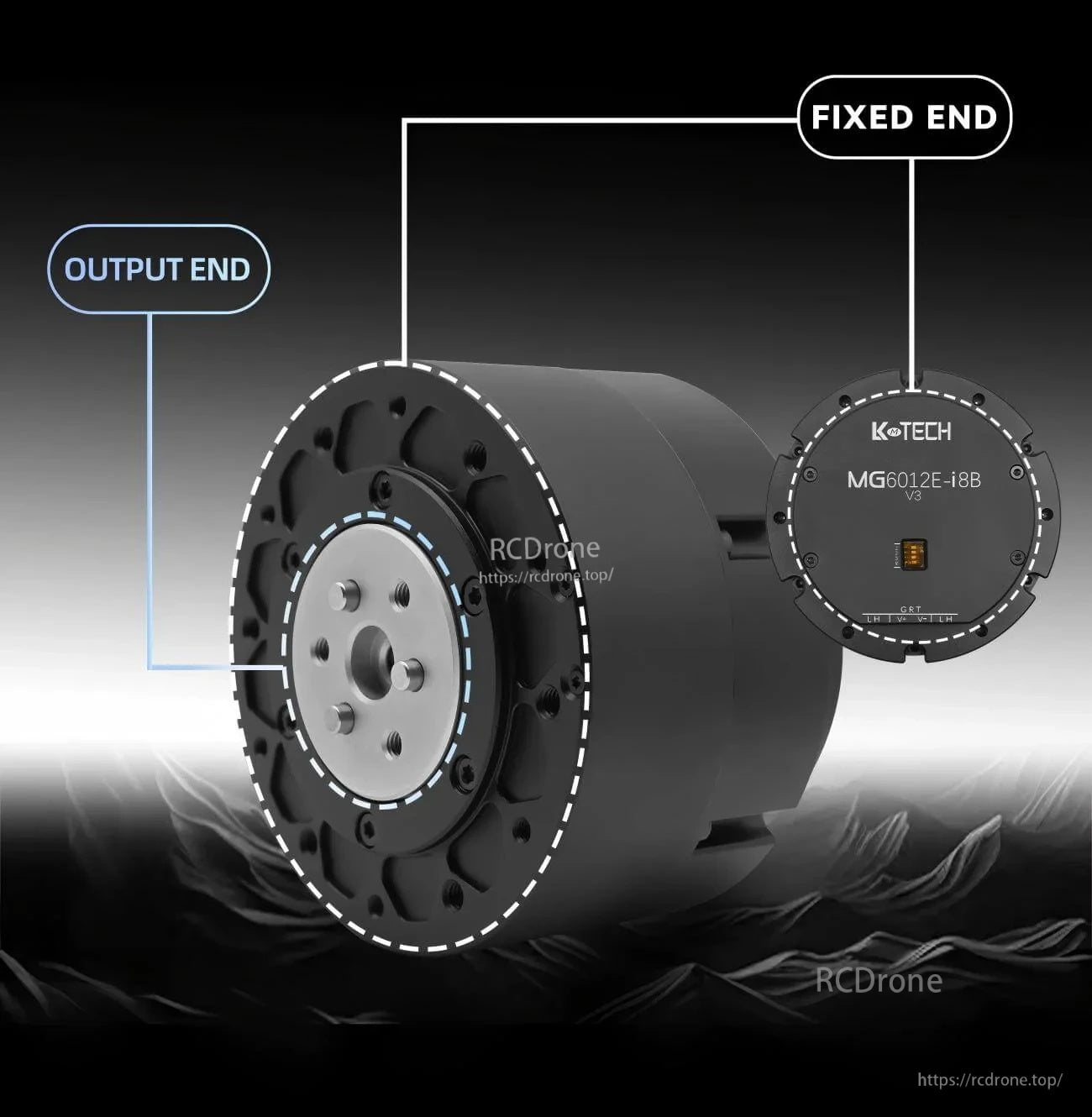
আউটপুট প্রান্ত এবং স্থির প্রান্ত উভয়ই জয়েন্ট, আর্ম এবং অন্যান্য অ্যাকচুয়েটর অ্যাসেম্বলিতে সহজে মাউন্ট করার জন্য ডিজাইন করা হয়েছে।

একটি ১৮-বিট একক-টার্ন অ্যাবসোলিউট ম্যাগনেটিক এনকোডার এবং একীভূত ব্রেক সঠিক নিয়ন্ত্রণ এবং লোডের অধীনে স্থিতিশীল ধারণ সমর্থন করে।
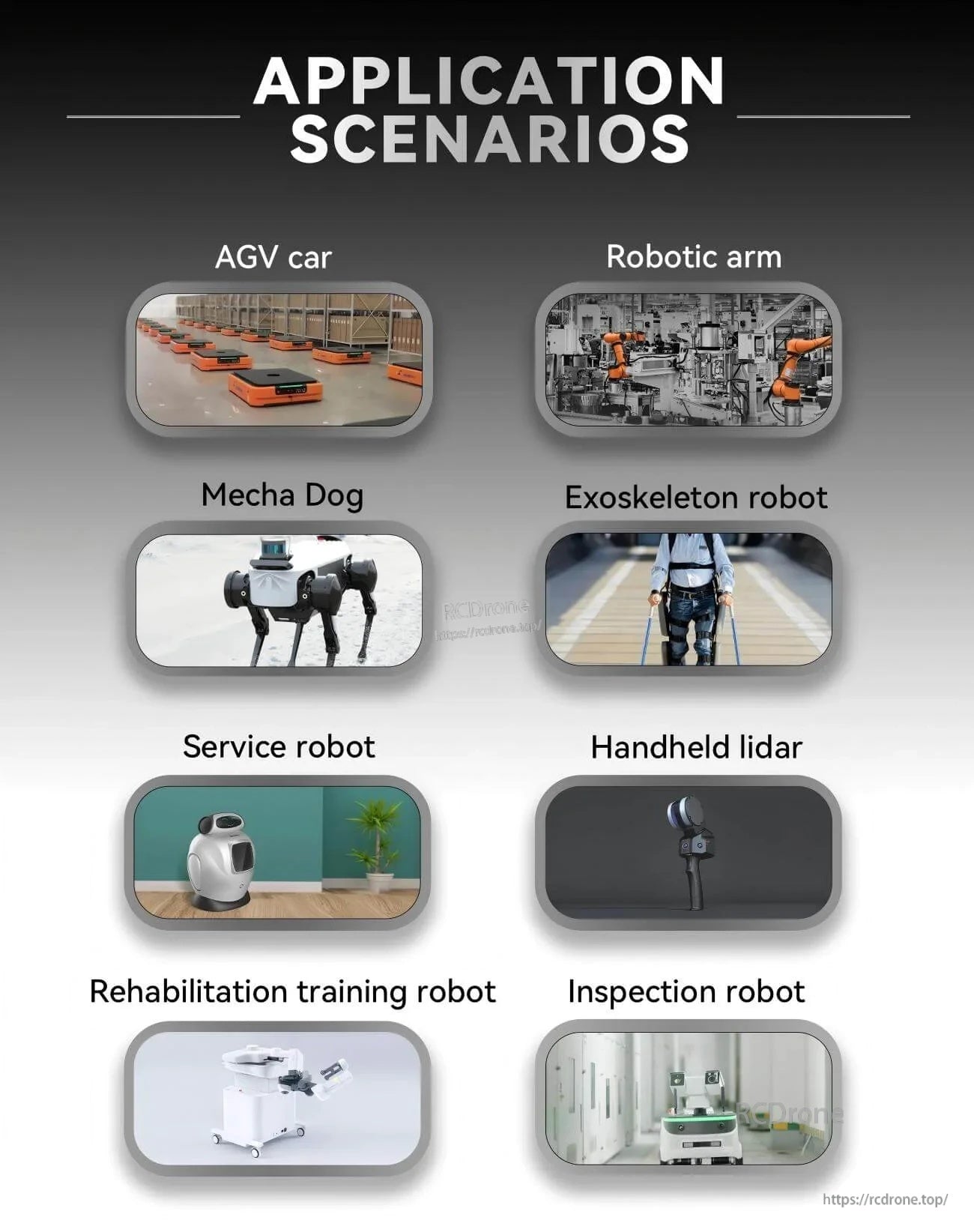
এটি অটোমেশন প্রকল্পের জন্য উপযুক্ত যেমন AGV ড্রাইভ মডিউল, রোবোটিক আর্ম, চতুর্ভুজ, এক্সোস্কেলেটন এবং পরিদর্শন রোবট।
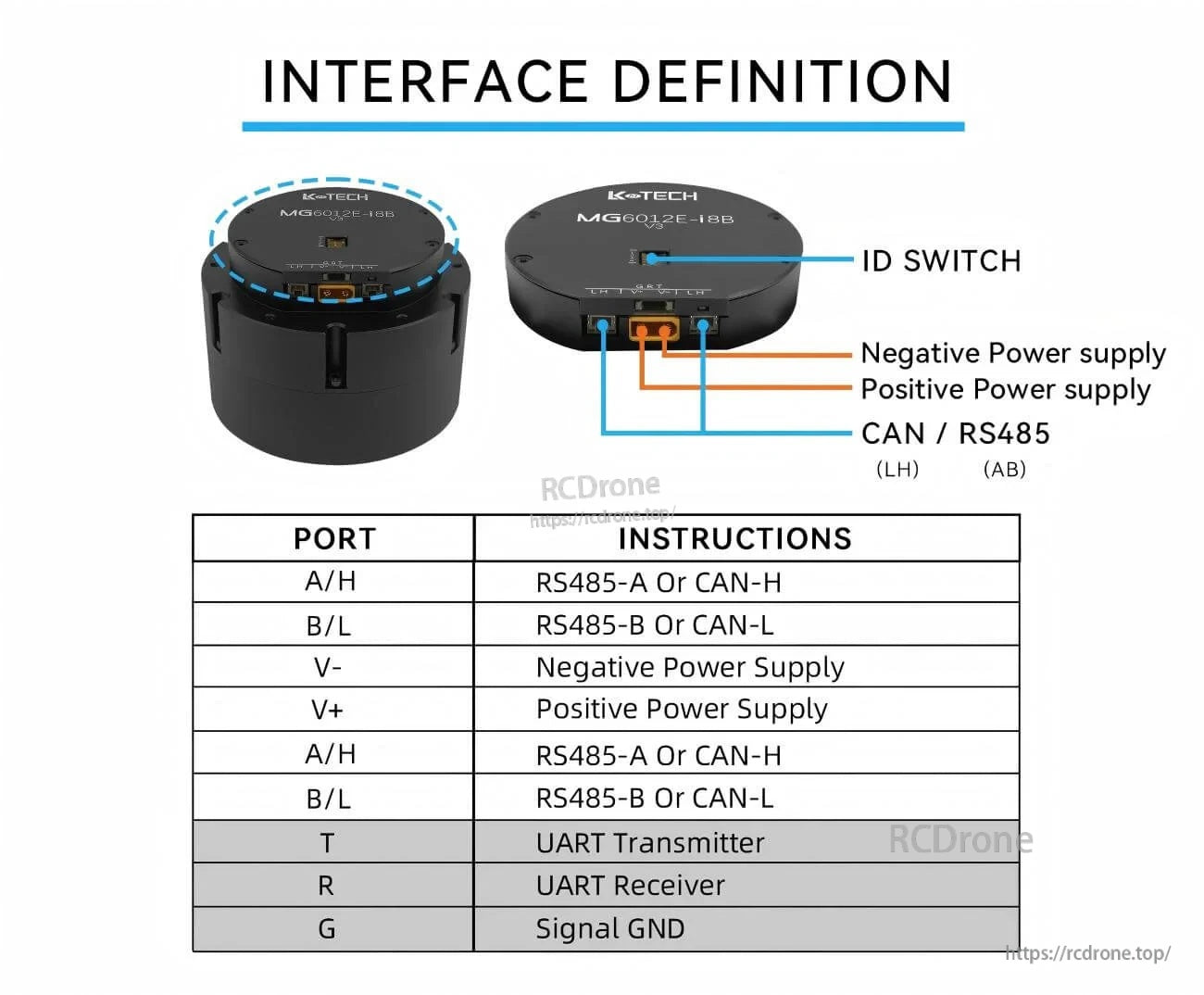
স্পষ্ট পোর্ট লেবেলিং পাওয়ার, আইডি কনফিগারেশন এবং RS485/CAN যোগাযোগের জন্য তারের কাজ দ্রুত করতে সহায়তা করে।
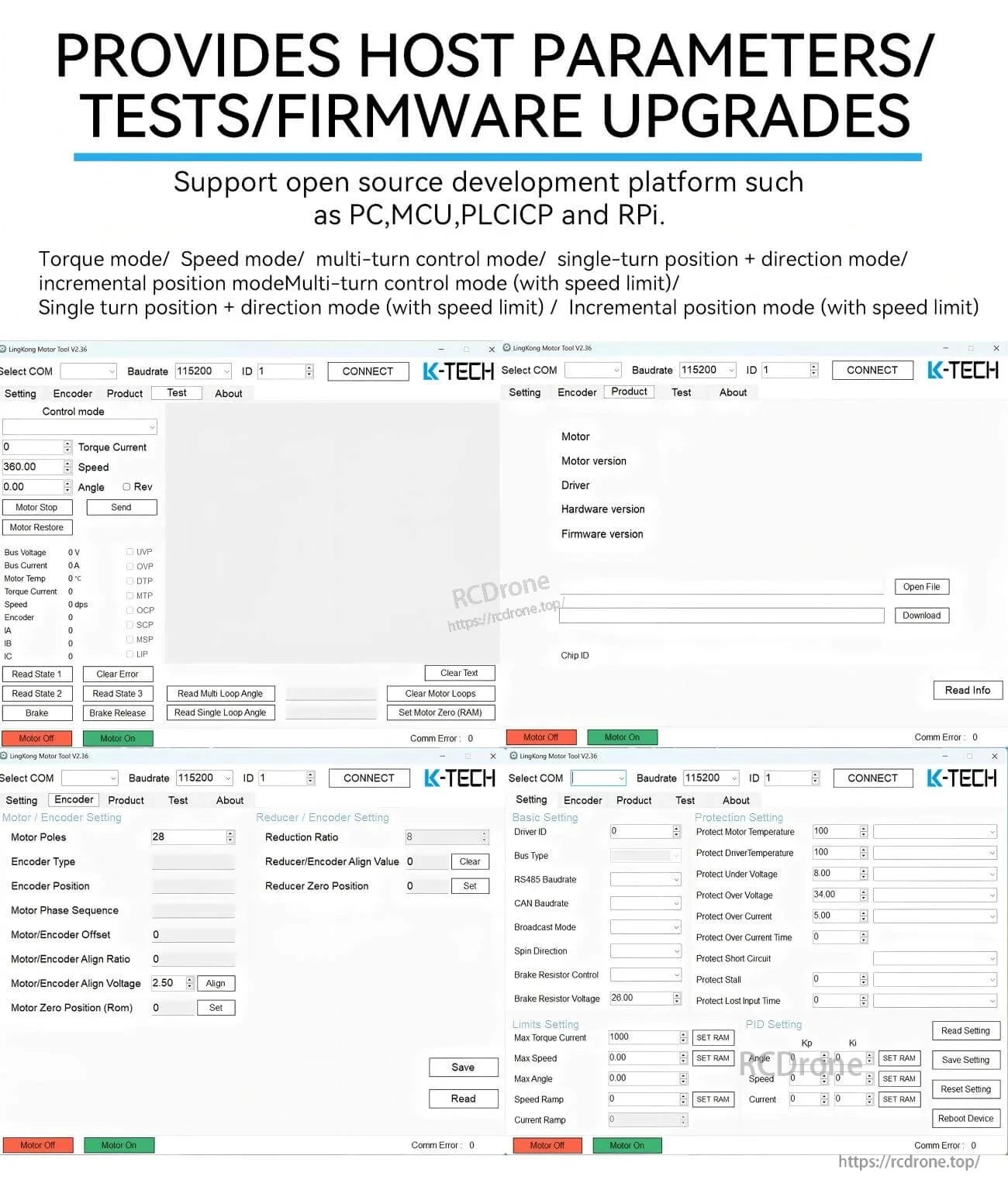
হোস্ট টুলগুলি সাধারণ উন্নয়ন প্ল্যাটফর্ম জুড়ে প্যারামিটার কনফিগারেশন, পরীক্ষণ এবং ফার্মওয়্যার আপডেট প্রদান করে।
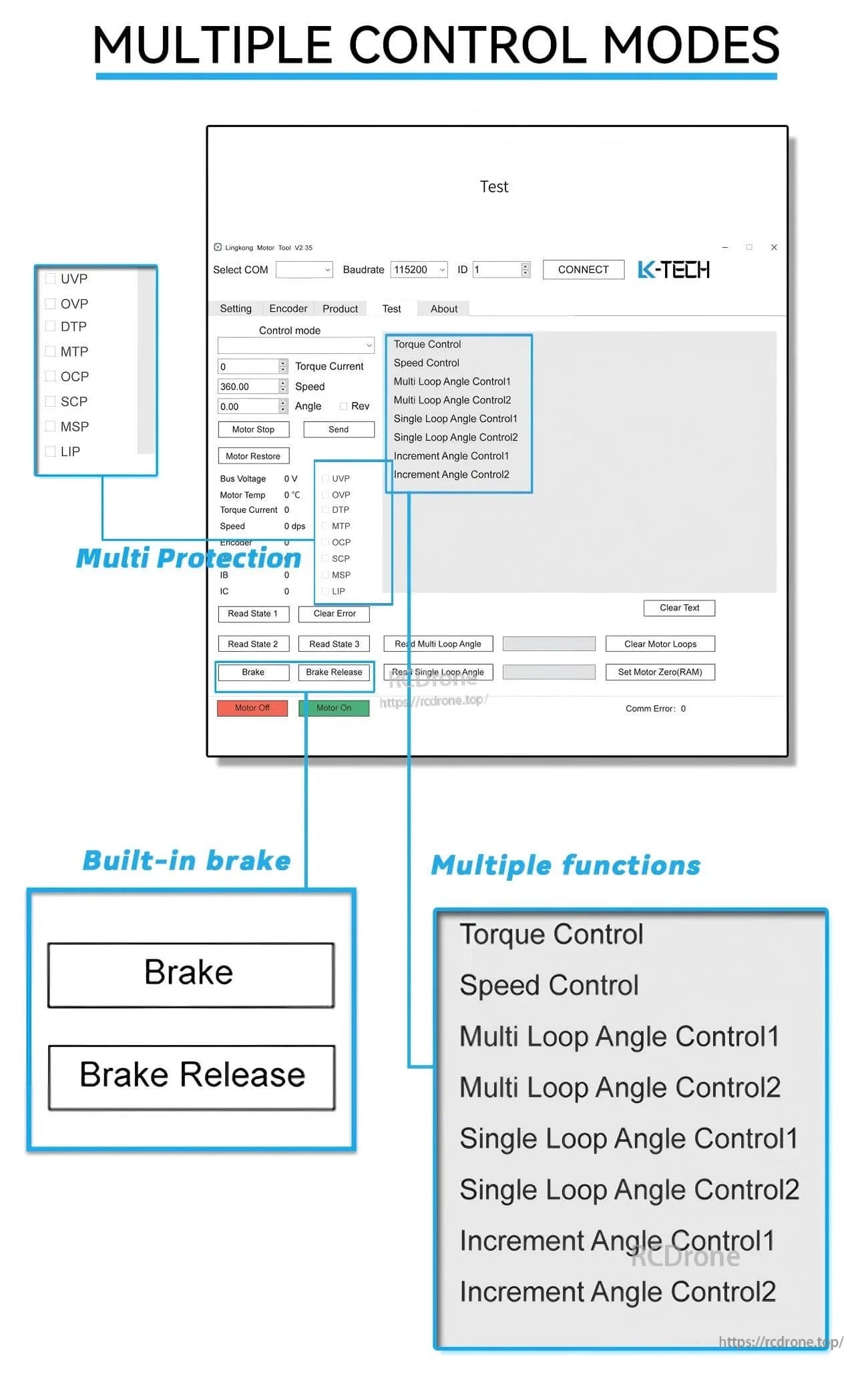
টর্ক, গতি এবং অবস্থান নিয়ন্ত্রণ মোডগুলি বিভিন্ন অ্যাকচুয়েটর এবং মোশন-কন্ট্রোল প্রয়োজনীয়তার সাথে মেলানোর জন্য নির্বাচিত করা যেতে পারে।

Related Collections




