




LKMTECH MG8016E-i6-V2 মোটর ৪৮ভি ৬৭০ওয়াট ১২এন.মি রেটেড টর্ক প্ল্যানেটারি রিডিউসার ১:৬ RS485/CAN
LKMTECH MG8016E-i6-V2 মোটর ৪৮ভি ৬৭০ওয়াট ১২এন.মি রেটেড টর্ক প্ল্যানেটারি রিডিউসার ১:৬ RS485/CAN
LKMTECH
নিয়মিত দাম
$495.00 USD
নিয়মিত দাম
বিক্রয় মূল্য
$495.00 USD
একক দাম
per
Taxes included.
শিপিং চেকআউটের সময় গণনা করা হয়।
পিকআপের উপলভ্যতা লোড করা যায়নি
অভিধান
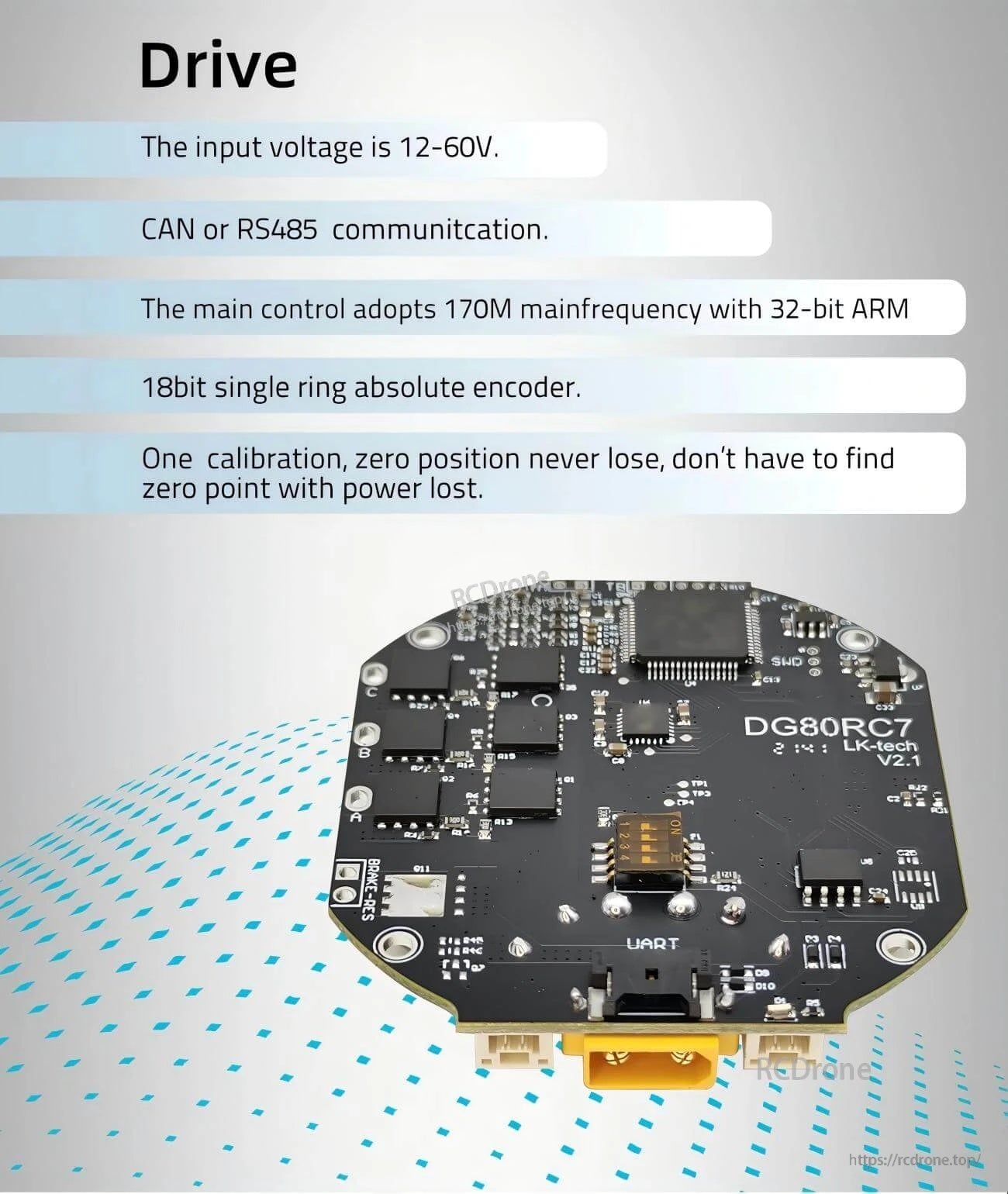
LKMTECH MG8016E-i6-V2 মোটর একটি ব্রাশলেস মোটর যা রোবোটিক অ্যাকচুয়েশন এবং মোশন কন্ট্রোল অ্যাপ্লিকেশনের জন্য একীভূত প্ল্যানেটারি রিডিউসার এবং চৌম্বক এনকোডার সহ। এটি 48V অপারেশনের জন্য নির্দিষ্ট এবং একটি সামঞ্জস্যপূর্ণ ড্রাইভের সাথে ব্যবহৃত হলে RS485 বা CAN এর মাধ্যমে নিয়ন্ত্রণ এবং যোগাযোগ সমর্থন করে।
মূল বৈশিষ্ট্য
- উচ্চ আউটপুট শক্তি, বৃহৎ আউটপুট টর্ক, উচ্চ নির্ভুলতা
- উচ্চ শক্তির ব্রাশলেস মোটর
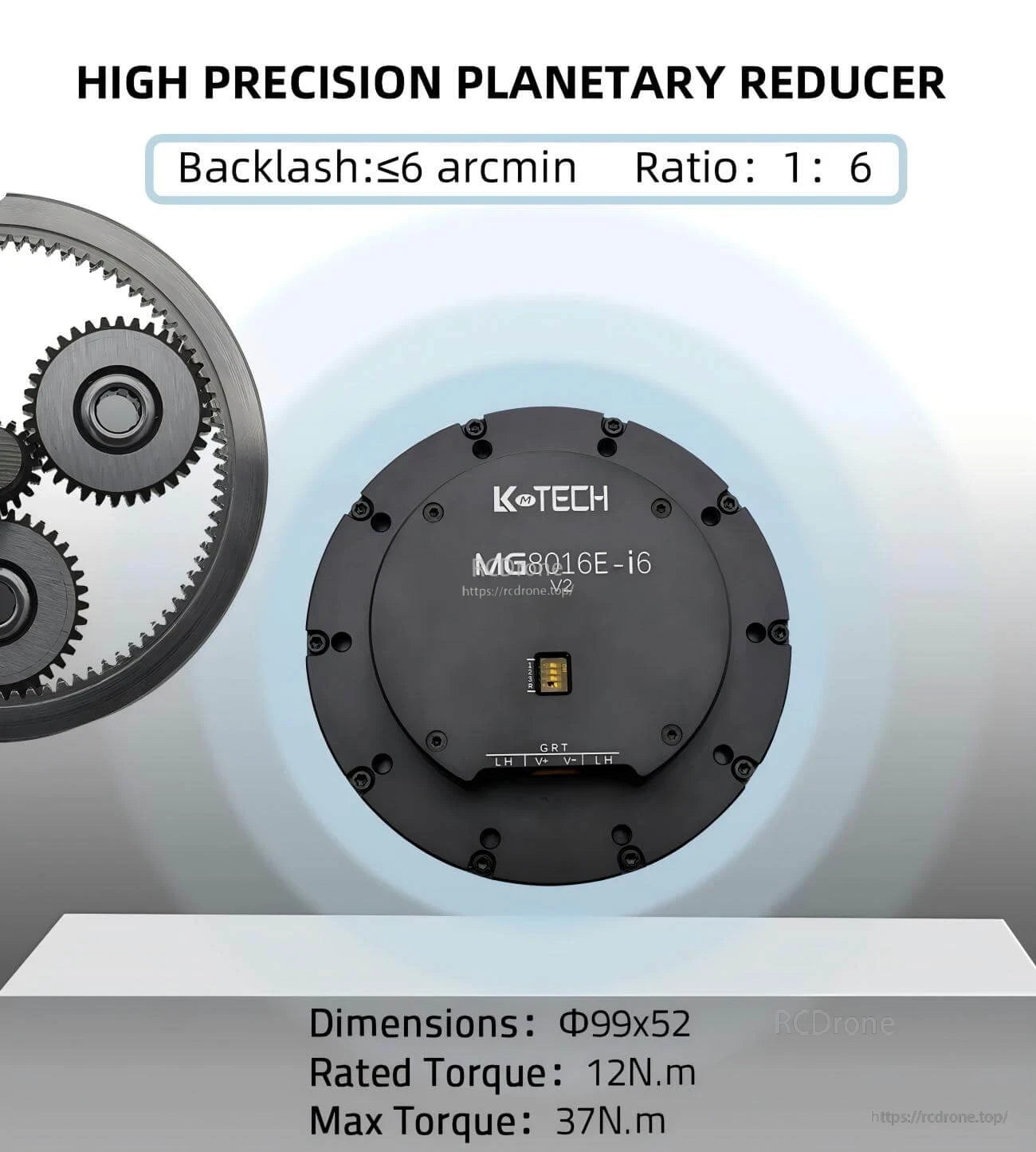
- উচ্চ নির্ভুলতা প্ল্যানেটারি রিডিউসার (ব্যাকল্যাশ ≤6 আর্কমিন, অনুপাত 1:6)
- ম্যাগনেটিক এনকোডার: 18-বিট (মোটর) এবং 14-বিট (রিডিউসার)
- অ্যাবসলিউট পজিশন সচেতনতা (একক বৃত্ত); এক ক্যালিব্রেশন, পাওয়ার লসের পর শূন্য পজিশন হারানো হয় না
- যোগাযোগ: RS485 বা CAN (নির্দিষ্ট যোগাযোগ ফ্রিকোয়েন্সির সাথে)
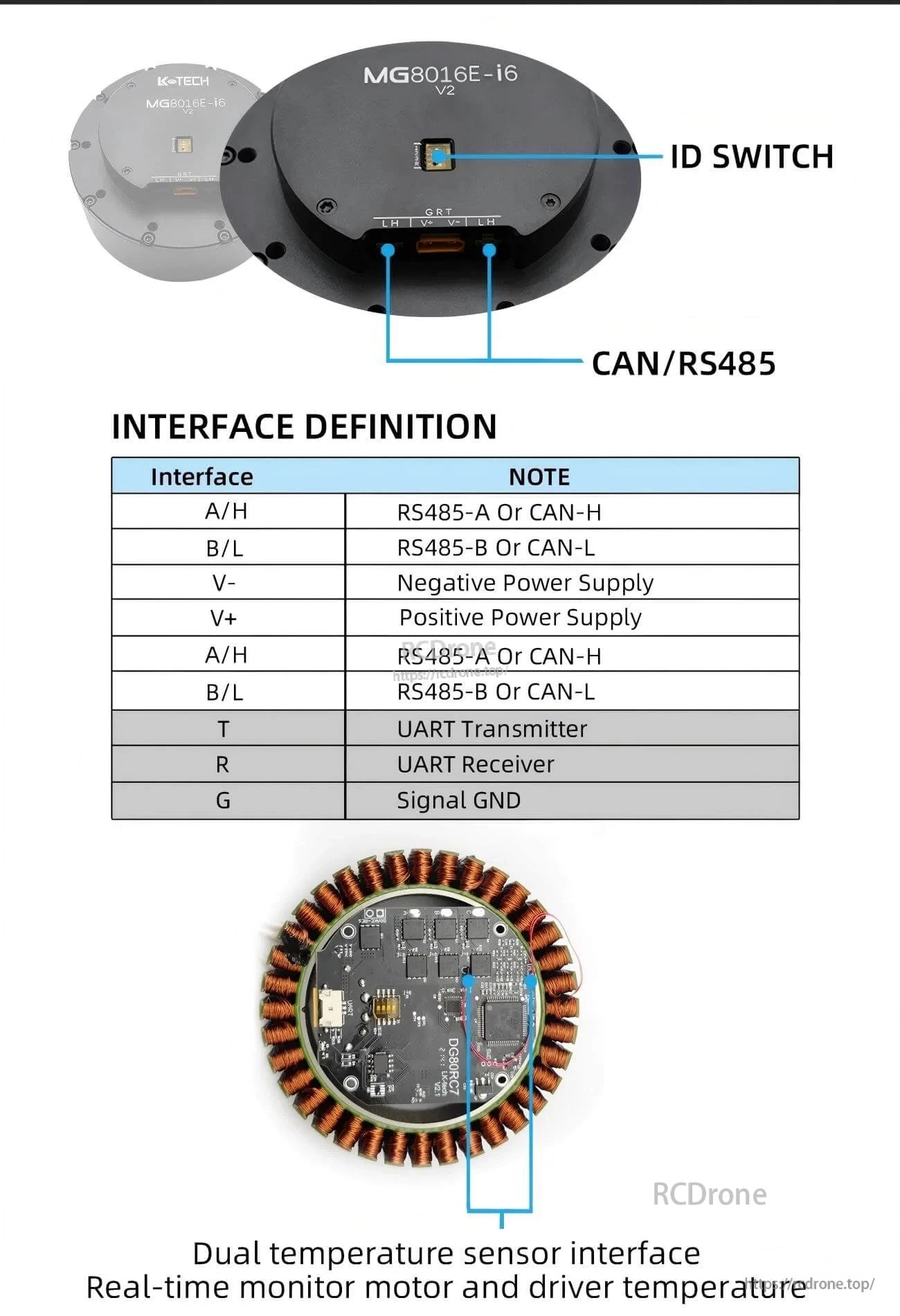
- মোটর এবং ড্রাইভারের তাপমাত্রার রিয়েল-টাইম মনিটরিংয়ের জন্য ডুয়াল তাপমাত্রা সেন্সর ইন্টারফেস
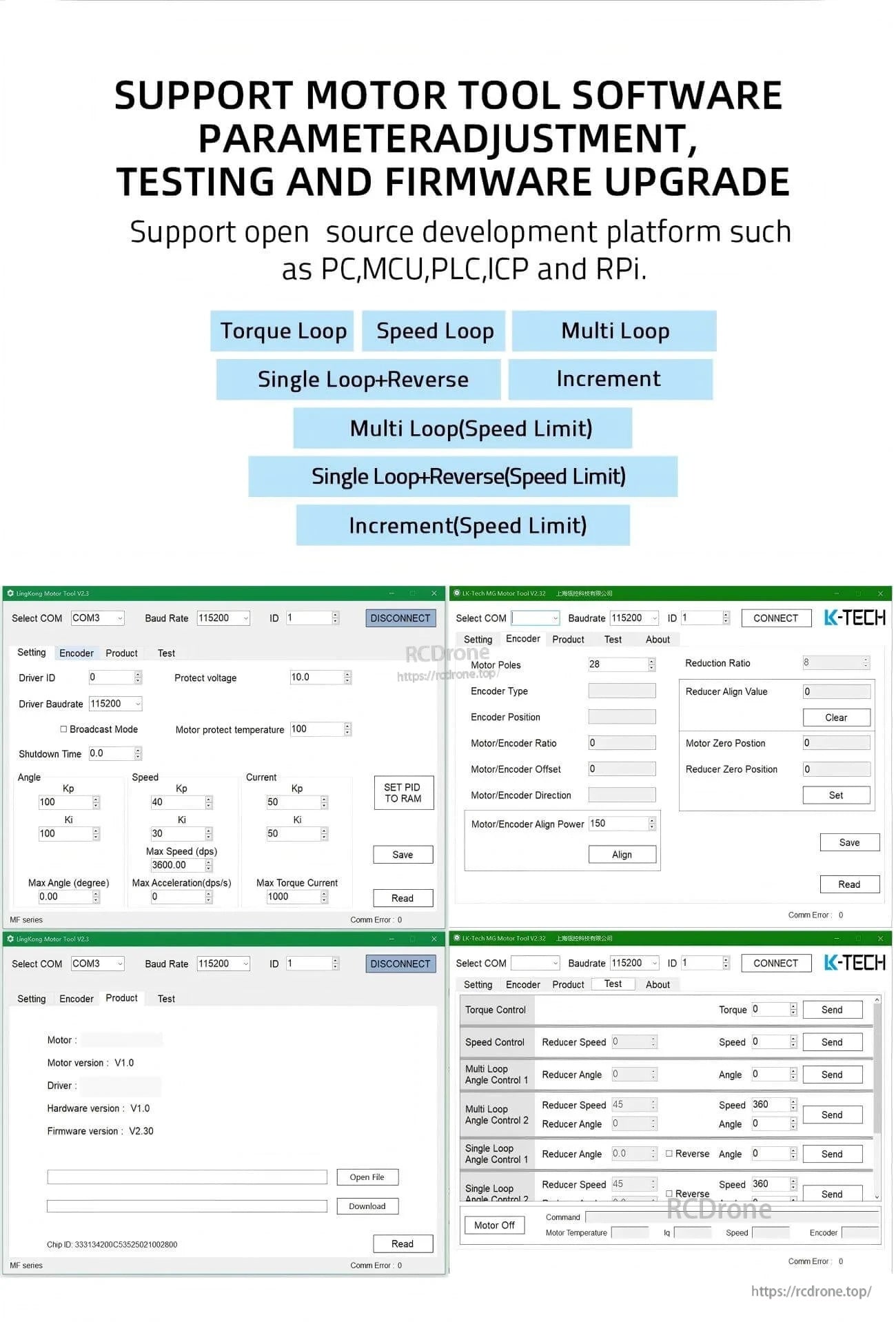
- প্যারামিটার সমন্বয়, পরীক্ষণ এবং ফার্মওয়্যার আপগ্রেডের জন্য মোটর টুল সফটওয়্যার সমর্থন করে; PC, MCU, PLC, ICP, এবং RPi এর মতো ওপেন ডেভেলপমেন্ট প্ল্যাটফর্ম সমর্থন করে
প্রি-সেল সামঞ্জস্য পরীক্ষা এবং ইন্টিগ্রেশন সমর্থনের জন্য, যোগাযোগ করুন https://rcdrone.top/ অথবা ইমেইল করুন [email protected].
স্পেসিফিকেশন
| আইটেমের নাম | MG8016E-i6-V2 |
| রেটেড ভোল্টেজ | 48V |
| সর্বাধিক গতি | 300RPM |
| রেটেড টর্ক | 12N.m |
| রেটেড গতি | 258RPM |
| রেটেড কারেন্ট | 8.4A |
| সর্বাধিক শক্তি | 670W |
| সর্বাধিক টর্ক | 37N.m |
| গতি ধ্রুবক | 41.7rpm/V |
| টর্ক ধ্রুবক | 0.24N.m/A |
| টার্নস | 17 |
| ওয়াইন্ডিং টাইপ | Δ |
| ফেজ রেজিস্ট্যান্স | 0.6Ω |
| ফেজ ইন্ডাকট্যান্স | 0.6mH |
| মোটর পোল | 40 |
| রোটর জড়তা | 2570gcm² |
| মোটর তাপমাত্রা | হ্যাঁ |
| রিডিউসার টাইপ | PG5506 |
| হ্রাস অনুপাত | 1:6 |
| ব্যাকল্যাশ | ≤6 আর্কমিন |
| বেয়ারিং রেটেড লোড | 1120N |
| মোটর ওজন | 759g |
| আকার | Φ99x52 |
| প্রস্তাবিত ড্রাইভ | DG60E |
| ড্রাইভ ইনপুট ভোল্টেজ | 12-60V |
| যোগাযোগ | RS485 অথবা CAN |
| যোগাযোগ ফ্রিকোয়েন্সি | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| এনকোডার | ১৮ বিট(মোটর)&১৪ বিট(রিডিউসার)ম্যাগনেটিক এনকোডার |
| এনকোডার বাউডরেট(RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| বাউডরেট(CAN) | 1M |
| নিয়ন্ত্রণ মোড | টর্ক লুপ(32KHz)/স্পিড লুপ(8KHz)/পজিশন লুপ(4KHz) |
| অ্যাক্সেলেশন কার্ভ | ট্রাপিজয়েড অ্যাক্সেলেশন |
ইন্টারফেস সংজ্ঞা
| A/H | RS485-A অথবা CAN-H |
| B/L | RS485-B অথবা CAN-L |
| V- | নেগেটিভ পাওয়ার সাপ্লাই |
| V+ | পজিটিভ পাওয়ার সাপ্লাই |
| A/H | RS485-A অথবা CAN-H |
| B/L | RS485-B অথবা CAN-L |
| T | UART ট্রান্সমিটার |
| আর | UART রিসিভার |
| জি | সিগন্যাল গ্রাউন্ড |
অ্যাপ্লিকেশনসমূহ
- মানবাকৃতির রোবট
- রোবটিক হাত
- এক্সোস্কেলেটন / পরিধানযোগ্য রোবট
- চতুর্ভুজ রোবট (রোবট কুকুর)
- AGV যানবাহন (AGV গাড়ি)
- ARU রোবট
ম্যানুয়াল
বিস্তারিত




Related Collections




