Matek AP Periph CAN নোড CAN-G474 DroneCAN অ্যাডাপ্টার বোর্ড, STM32G474CE ৫১২KB, CANFD ৫Mbit/s
Matek AP Periph CAN নোড CAN-G474 DroneCAN অ্যাডাপ্টার বোর্ড, STM32G474CE ৫১২KB, CANFD ৫Mbit/s
MATEKSYS
নিয়মিত দাম
$39.00 USD
নিয়মিত দাম
বিক্রয় মূল্য
$39.00 USD
একক দাম
per
Taxes included.
শিপিং চেকআউটের সময় গণনা করা হয়।
পিকআপের উপলভ্যতা লোড করা যায়নি
সারসংক্ষেপ
এই AP Periph CAN Node, Matek AP Periph CAN Node CAN-G474, একটি ArduPilot AP_Periph অ্যাডাপ্টার নোড যা 5Mbit/s CAN ট্রান্সসিভার এবং STM32G474 MCU ব্যবহার করে একটি DroneCAN বাসে পারিফেরাল যুক্ত করার জন্য ডিজাইন করা হয়েছে। এটি ArduPilot সমর্থিত সেন্সর এবং GPIO-ভিত্তিক পারিফেরাল (যেমন PWM আউটপুট এবং LED নোটিফাই মডিউল) কে DroneCAN এর মাধ্যমে একত্রিত করতে সক্ষম করে।
মূল বৈশিষ্ট্যসমূহ
- ArduPilot AP_Periph ফার্মওয়্যার ভিত্তিক অ্যাডাপ্টার নোড
- 512KB ফ্ল্যাশ সহ STM32G474CE MCU
- CANFD-সমর্থিত হার্ডওয়্যার 1Mbit ~ 5Mbit এর CAN/CANFD সমর্থন সহ
- 2x CAN বাস
- GNSS, রেঞ্জফাইন্ডার, প্রোক্সিমিটি, EFI, RC ইনপুট (রিসিভার) এর জন্য 4x UART; GNSS, কম্পাস, বায়ুমণ্ডলীয় চাপের জন্য ডিফল্টভাবে TX3 এ MSP সক্ষম
- I2C পেরিফেরাল (এয়ারস্পিড সেন্সর, বায়ুমণ্ডলীয় চাপ, কম্পাস) এর জন্য 2x I2C বাস
- RM3100 এর জন্য 1x SPI (নীচের দিকে “CS, MOSI, MISO, SCK” সিল্কপ্রিন্ট সহ SPI প্যাড)
- সার্ভো এবং ESC এর জন্য 11x PWM আউটপুট; সমস্ত PWM DMA/DShot সমর্থন করে (DuPont 2 এ PWM1-10)।৫৪মিমি গর্ত; নিচের দিকে "১১" সিল্কপ্রিন্ট সহ PWM11 প্যাড)
- ড্রোনক্যান GUI টুল / মিশন প্ল্যানার (ড্রোনক্যান ট্যাব) এবং STM32CubeProgrammer DFU মোড (UART1) এর মাধ্যমে ফার্মওয়্যার আপডেট সমর্থন
স্পেসিফিকেশন
| এমসিইউ | STM32G474CE |
| ফ্ল্যাশ | ৫১২কেবি |
| CAN ট্রান্সসিভার ডেটা রেট | ৫এমবিট/সেকেন্ড পর্যন্ত |
| CAN / CANFD সমর্থন | ১এমবিট ~ ৫এমবিট CAN/CANFD |
| CAN বাস | ২x |
| UART | ৪x (ডিফল্টভাবে TX3 এ MSP সক্ষম) |
| I2C | ২x |
| SPI | ১x (RM3100 এর জন্য) |
| PWM আউটপুট | ১১x (DuPont 2 এ PWM1-10)54মিমি গর্ত; PWM11 প্যাড নিচের দিকে) |
| ডিবাগ | ST ডিবাগ, SWC & SWD (নিচের দিকে) |
| ফার্মওয়্যার আপডেট (DFU) | UART1 (TX1, RX1) |
| LED সূচক | নীল দ্রুত ঝলকানো: বুটিং; নীল ধীর ঝলকানো: ফ্লাইট কন্ট্রোলারের সাথে যোগাযোগ করছে; লাল: 3.3V সূচক |
| ইনপুট ভোল্টেজ পরিসীমা | 4.5~5.5V @5V প্যাড/পিন& |
| শক্তি খরচ | 62mA |
| অপারেটিং তাপমাত্রা | -30~85 °C |
| সংযোগকারী | 5x JST-GH-4P (SM04B-GHS-TB) CAN1, CAN2, I2C1, UART1, UART4 এর জন্য; 1x JST-GH-6P (SM06B-GHS-TB) UART3+I2C2 এর জন্য |
| থ্রু-হোলস | 18x DuPont 2.৫৪মিমি গর্ত |
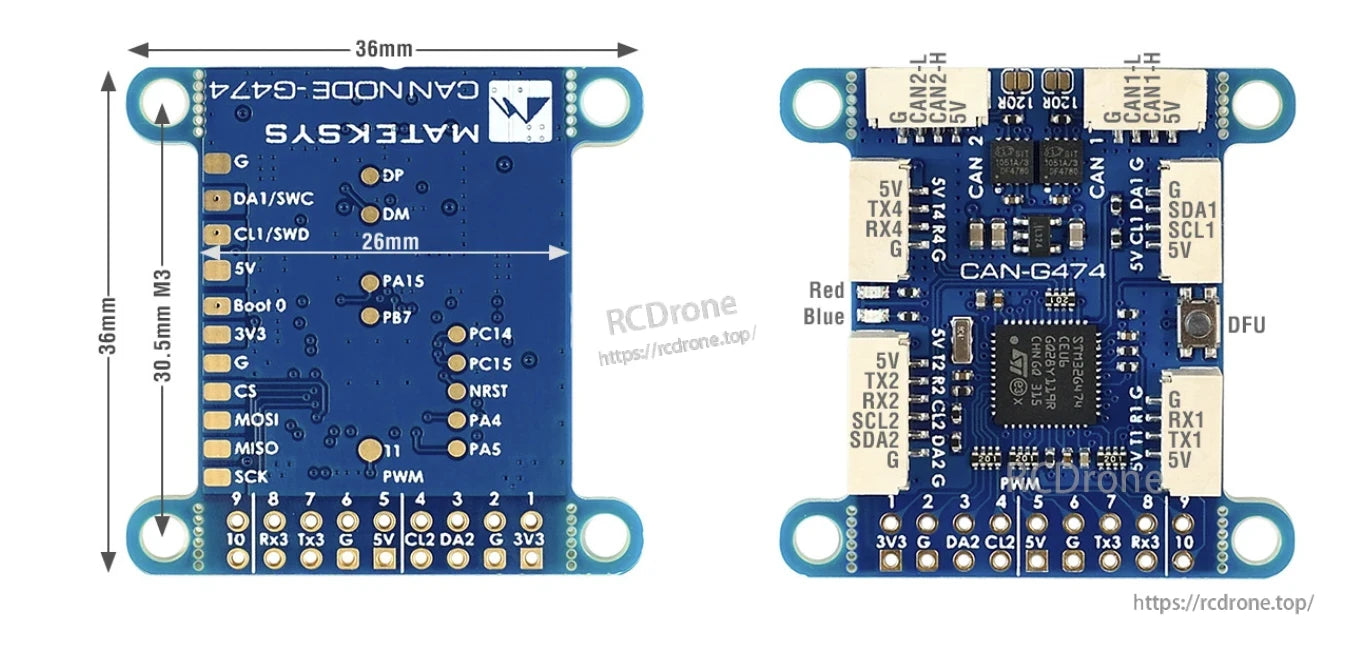
| বোর্ডের আকার | ৩৬মিমি*৩৬মিমি*৬মিমি |
| ওজন | ৫.২গ্রাম |
| মাউন্টিং | ৩০.৫মিমি ৪x ব্যাস।3mm |
কি অন্তর্ভুক্ত
- 1x CAN-G474 বোর্ড
- 2x JST-GH-4P থেকে JST-GH-4P 20cm সিলিকন তার
- 1x JST-GH-6P থেকে JST-GH-6P 20cm সিলিকন তার
গ্রাহক সেবা: https://rcdrone.top/ অথবা [email protected]
অ্যাপ্লিকেশনসমূহ
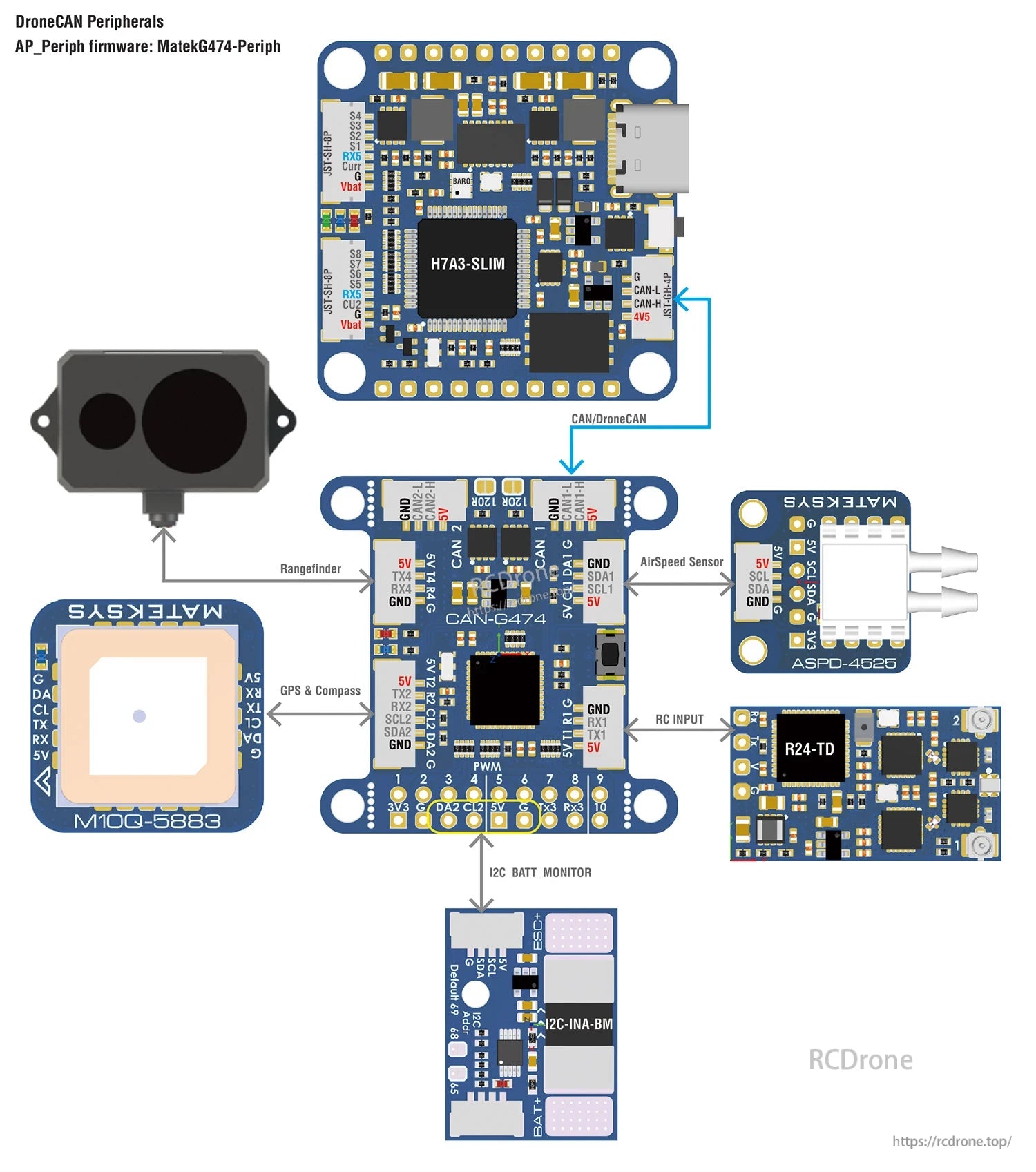
- ArduPilot সমর্থিত পেরিফেরালগুলোকে DroneCAN বাস পেরিফেরালে রূপান্তর করুন (GNSS, কম্পাস, বায়ুমণ্ডলীয় চাপ, বায়ু গতি সেন্সর, রেঞ্জফাইন্ডার, নিকটতা সেন্সর, ইলেকট্রনিক ফুয়েল ইনজেক্টর)
- DroneCAN-এ GPIO-ভিত্তিক পেরিফেরাল, PWM এবং LED নোটিফাই মডিউলসহ
- উদাহরণ পেরিফেরাল সংযোগ দেখানো হয়েছে: রেঞ্জফাইন্ডার, GPS & কম্পাস, বায়ু গতি সেন্সর, RC ইনপুট, I2C ব্যাটারি মনিটর
- অতিরিক্ত সংযোগের বিকল্প: ফ্লাইট কন্ট্রোলারের সাথে একটি CAN বাস সংযুক্ত করুন, অথবা উভয় সংযুক্ত করুন
ম্যানুয়ালসমূহ
- ফার্মওয়্যার ডাউনলোড (ArduPilot AP_Periph): https://firmware.ardupilot.org/AP_Periph/
- MatekG474-Periph (পার্শ্বীয় সেন্সরের জন্য)
- MatekG474-DShot (DroneCAN-PWM আউটপুটের জন্য)
- আপডেট পদ্ধতি
- DroneCAN GUI টুল বা মিশন প্ল্যানার – DroneCAN ট্যাব, “AP_Periph.bin” লোড করুন
- STM32CubeProgrammer DFU মোড: USB-TTL মডিউল UART1-এ সংযুক্ত করুন, DFU বোতাম ধরে USB প্লাগ করুন, “AP_Periph_with_bl.hex” লোড করুন
- 3D ফাইল: CAN-G474_STEP.zip
- টিউটোরিয়াল: PWM এবং DShot-এর জন্য MatekL431 অ্যাডাপ্টার ব্যবহার করা
বিস্তারিত
Matek CAN-G474 বোর্ডটি সাধারণ অটোপাইলট পার্শ্বীয় ডিভাইস সংযোগের জন্য UART, I2C এবং PWM প্যাডের পাশাপাশি একটি DroneCAN/CAN পোর্ট প্রদান করে।
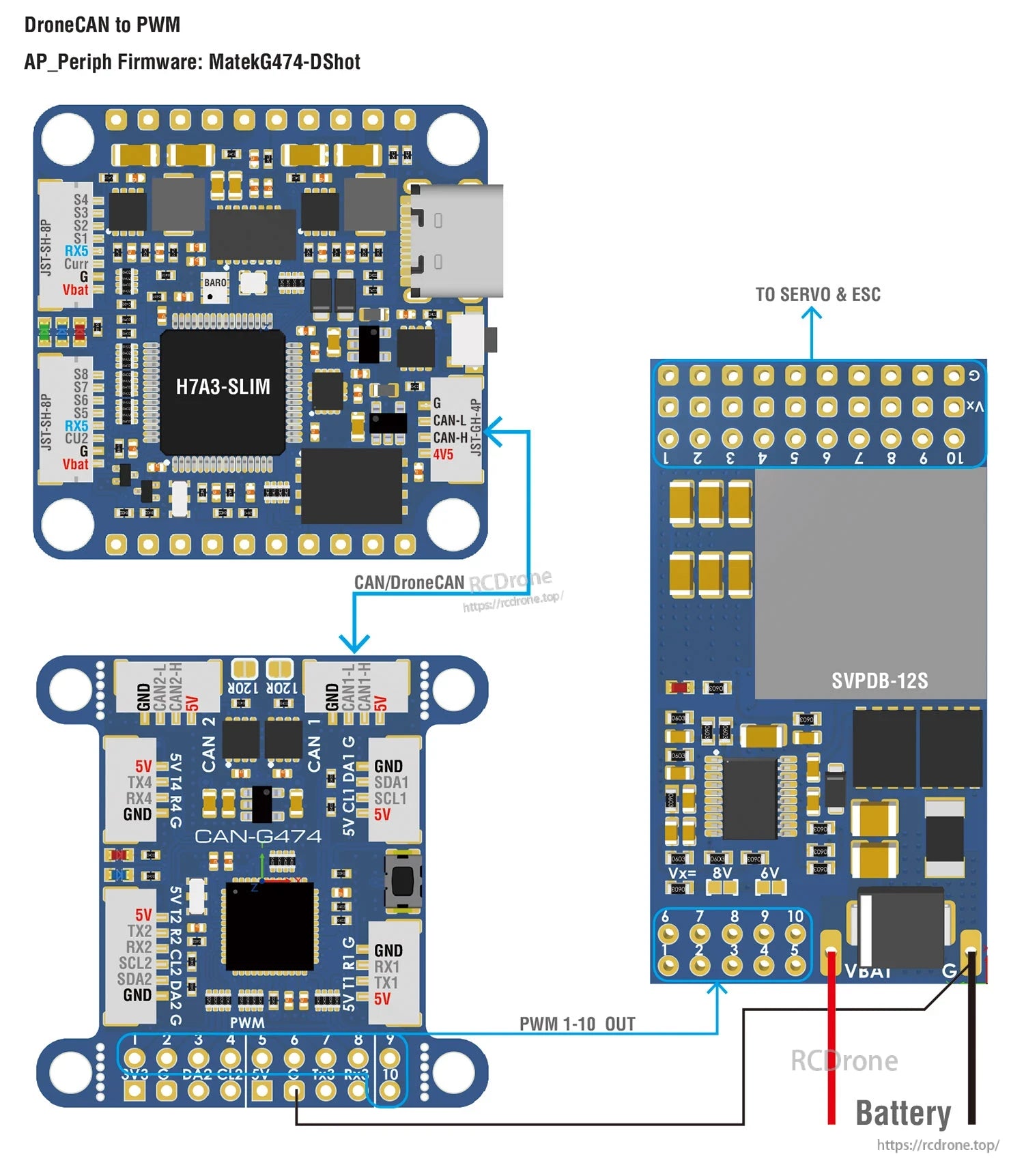
ম্যাটেক CAN-G474 বোর্ড একটি CAN/DroneCAN বাসের সাথে সংযুক্ত হয় এবং সার্ভো বা ESC এর জন্য 10 টি PWM আউটপুট পর্যন্ত বিভক্ত করে।
Related Collections