MATEK RM3100 RM3100 - Mateksys AP_PERIPH ম্যাগনেটোমিটার ড্রোনক্যান প্রোটোকল করতে পারে
MATEK RM3100 RM3100 - Mateksys AP_PERIPH ম্যাগনেটোমিটার ড্রোনক্যান প্রোটোকল করতে পারে
MATEKSYS
পিকআপের উপলভ্যতা লোড করা যায়নি
MATEK RM3100 RM3100 স্পেসিফিকেশন
ব্যবহার করুন: যানবাহন এবং রিমোট কন্ট্রোল খেলনা
প্রস্তাবিত বয়স: 12+y
উৎপত্তি: মেনল্যান্ড চায়না
উপাদান: যৌগিক উপাদান
ব্র্যান্ডের নাম: MATEKSYS
AP_PERIPH ম্যাগনেটোমিটার RM3100 পারে
RM3100, DroneCAN প্রোটোকল
-
CAN-L4-3100 হল RM3100 এবং ArudPilot AP_Periph ফার্মওয়্যারের উপর ভিত্তি করে একটি পেশাদার গ্রেড CAN ম্যাগনেটোমিটার৷
-
RM3100 সেন্সর প্রযুক্তি উচ্চ রেজোলিউশন, কম শক্তি খরচ, বড় সংকেত শব্দ প্রতিরোধ ক্ষমতা, একটি বড় গতিশীল পরিসীমা এবং উচ্চ নমুনা হার প্রদান করে। পরিমাপগুলি তাপমাত্রার উপর স্থিতিশীল এবং অন্তর্নিহিতভাবে অফসেট ড্রিফ্ট থেকে মুক্ত৷
স্পেসিফিকেশন
-
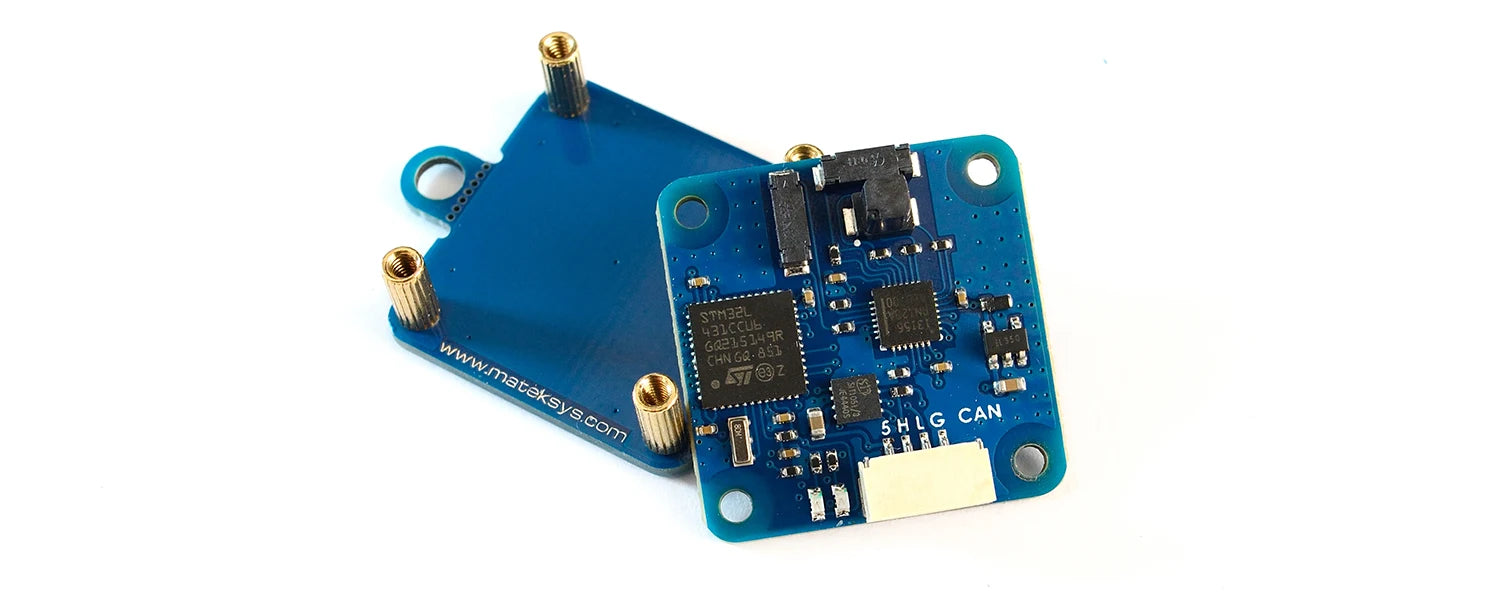
PNI RM3100 জিওম্যাগনেটিক সেন্সর
-
CAN নোড MCU: STM32L431xC, 256KB ফ্ল্যাশ
-
ইন্টারফেস
-
CAN, DroneCAN প্রোটোকল
-
UART2, MSP আউটপুট (MatekL431-Periph fw)
-
UART3, বাহ্যিক GNSS মডিউলের জন্য
-
ST ডিবাগ, SWCLK এবং SWDIO
-
-
LED
-
নীল, দ্রুত ব্লিঙ্কিং, বুটিং
-
নীল, ধীর ব্লিঙ্কিং, কাজ করছে
-
লাল, 3.3V ইন্ডিকেটর
-
-
CAN-L4-3100 বোর্ডের জন্য পাওয়ার সাপ্লাই : 4.5~5.5V @5V প্যাড/pin
t8502>
-
বিদ্যুৎ খরচ: 22mA
-
অপারেটিং তাপমাত্রা: -40~85 °C
-
শারীরিক
-
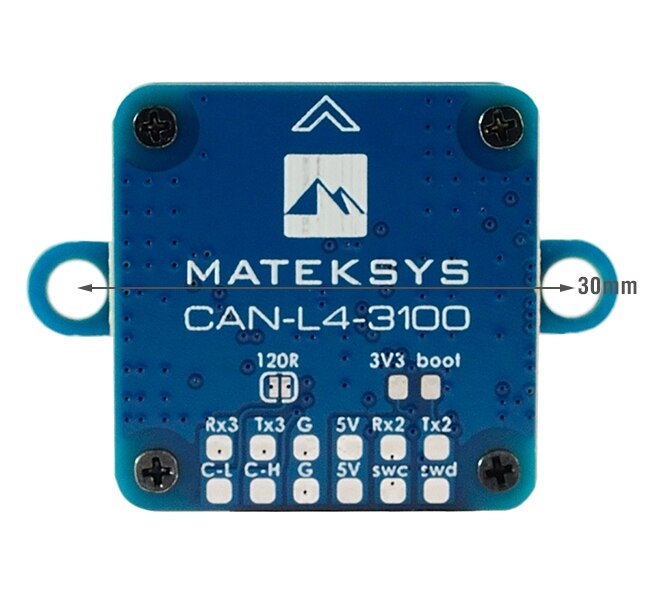
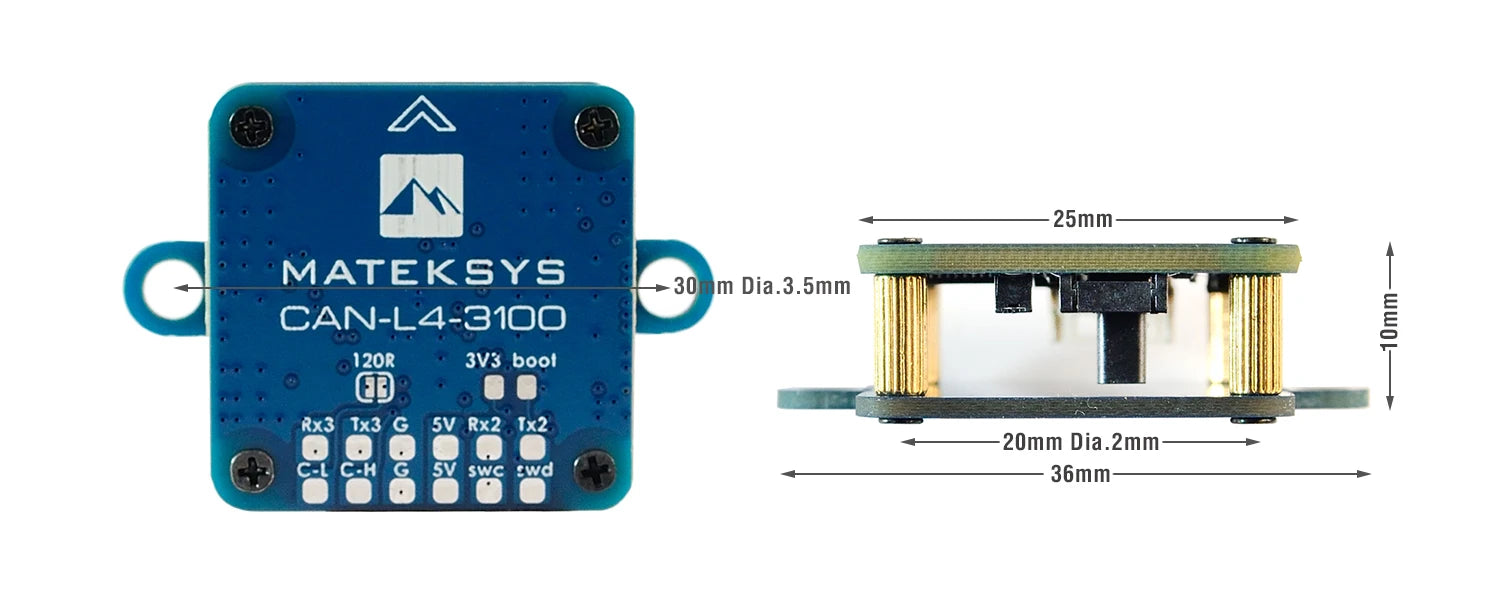
বোর্ডের আকার: 36mm*25mm*10mm। 6g
-
3D ফাইল CAN-L4-3100_step.zip
-
-
ফার্মওয়্যার
-
ArduPilot AP_Periph: MatekL431-GPS বা MatekL431-Periph
-
DroneCAN GUI টুল বা মিশন প্ল্যানার (AP_Periph.bin) এর মাধ্যমে আপডেট করুন
-
STLink এর মাধ্যমে আপডেট করুন (AP_Periph_with_bl.hex)
-
-
প্যারামিটার
-
CAN_P1_DRIVER = 1 যদি CAN bus1 পোর্টের সাথে সংযুক্ত থাকে অথবা CAN_P2_DRIVER = 1 যদি CAN bus2 পোর্টের সাথে সংযুক্ত থাকে
-
COMPASS_AUTODEC = 1
-
প্যাকিং
-
1x CAN-L4-3100 বোর্ড
-
1x JST-GH-4P থেকে JST-GH-4P 20cm সিলিকন তার
টিপস
-
CAN-L4-3100 "MatekL431-GPS" ফার্মওয়্যারের সাথে আগে থেকে ইনস্টল করা আছে৷
-
MSP বৈশিষ্ট্য "MatekL431-GPS"-এ নিষ্ক্রিয় করা আছে। আপনি যদি MSP বৈশিষ্ট্যটি ব্যবহার করতে চান, তাহলে ST-LINK এর মাধ্যমে SWC/SWD প্যাডের উপর "MatekL431-Periph" ফার্মওয়্যার(AP_Periph_with_bl.hex) দিয়ে রিফ্ল্যাশ করুন।
-
পাওয়ার লাইন/ESC/মোটর/লোহা ভিত্তিক উপাদান থেকে দূরে ম্যাগনেটোমিটার রাখুন। >=10 সেমি
-
আপনার প্রয়োজন না হলে মাউন্ট করার জন্য 2টি কান কেটে ফেলা যেতে পারে।
-
যদি CAN তারগুলি খুব লম্বা হয়, তাহলে "120R" জাম্পারটি ব্রিজ করুন৷
Related Collections