MATEK M10-L4-3100 GPS মডিউল - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEK M10-L4-3100 GPS মডিউল - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEKSYS
পিকআপের উপলভ্যতা লোড করা যায়নি
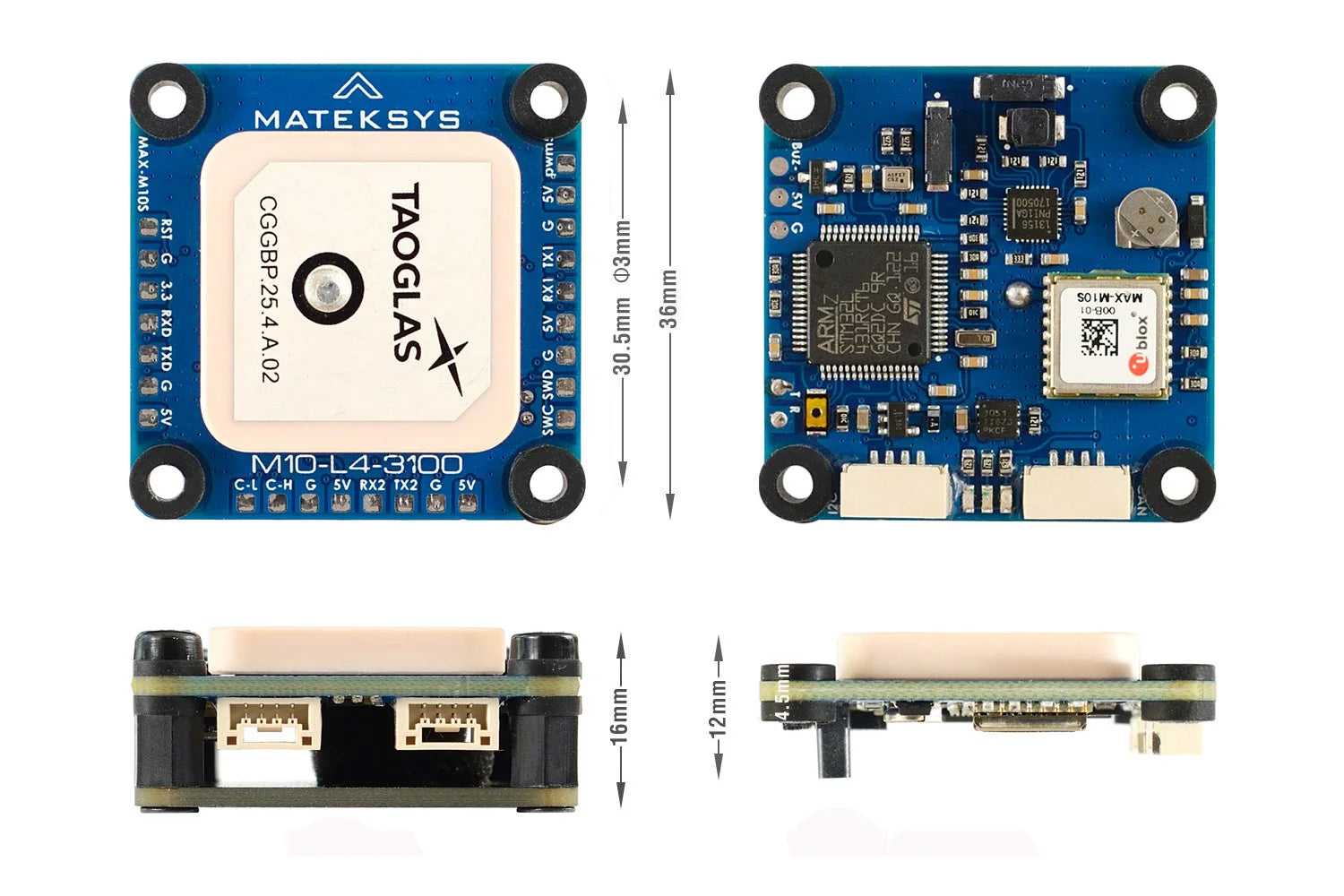
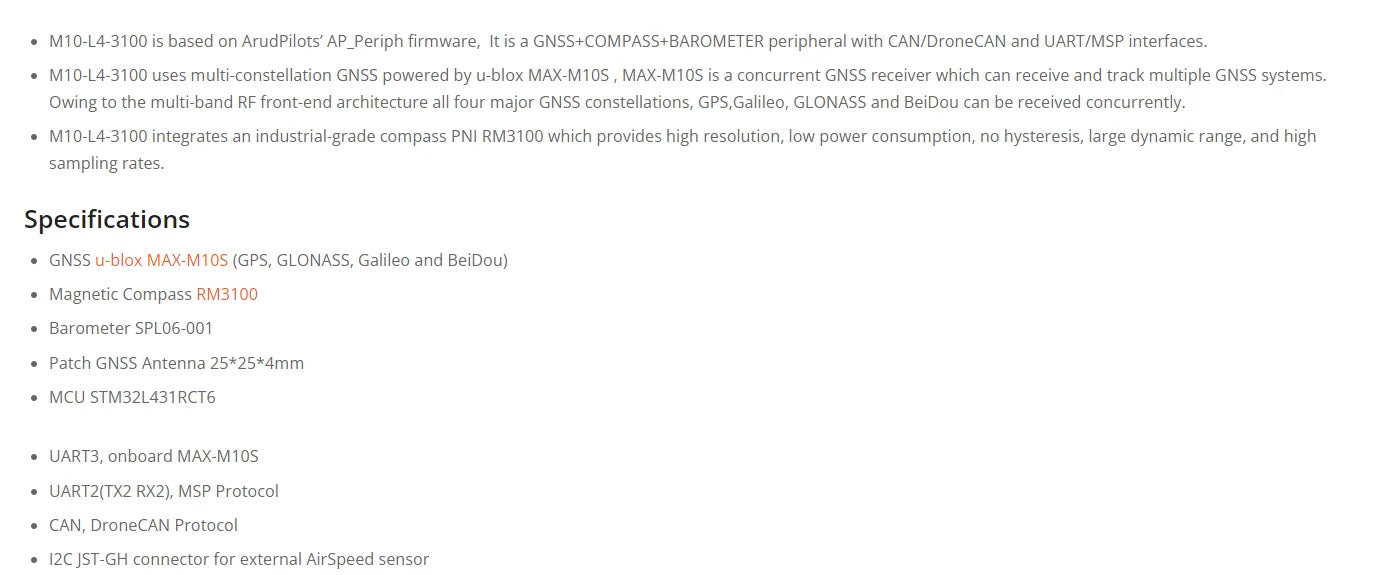
MATEK M10-L4-3100 - Mateksys AP_PERIPH GNSS স্পেসিফিকেশন
ব্যবহার করুন: যানবাহন এবং রিমোট কন্ট্রোল খেলনা
প্রস্তাবিত বয়স: 12+y,14+y,6-12y
উৎপত্তি: মেনল্যান্ড চায়না
উপাদান: যৌগিক উপাদান
ব্র্যান্ডের নাম: MATEKSYS
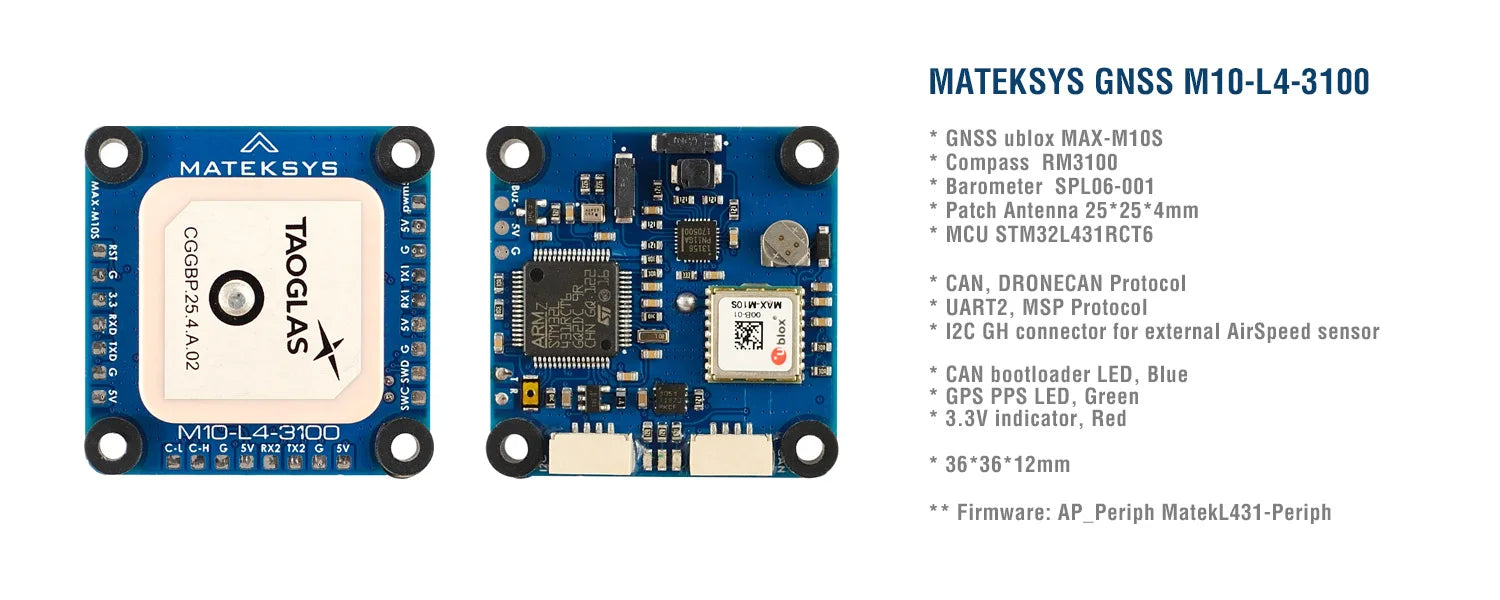
AP_PERIPH GNSS M10-L4-3100
AP_Periph L431 CAN নোড, MAX-M10S, RM3100, SPL06-001, DroneCAN প্রোটোকল এবং UART_MSP
-
M10-L4-3100 ArudPilots' AP_Periph ফার্মওয়্যারের উপর ভিত্তি করে, এটি CAN/DroneCAN এবং UART/MSP ইন্টারফেস সহ একটি GNSS+COMPASS+BAROMETER পেরিফেরাল৷
-
M10-L4-3100 ইউ-ব্লক্স MAX-M10S দ্বারা চালিত মাল্টি-কনস্টেলেশন GNSS ব্যবহার করে, MAX-M10S হল একটি সমবর্তী GNSS রিসিভার যা একাধিক GNSS সিস্টেম গ্রহণ এবং ট্র্যাক করতে পারে। মাল্টি-ব্যান্ড RF ফ্রন্ট-এন্ড আর্কিটেকচারের কারণে চারটি প্রধান GNSS নক্ষত্রপুঞ্জ, GPS, গ্যালিলিও, GLONASS এবং BeiDou একসাথে পাওয়া যেতে পারে।
-
M10-L4-3100 একটি শিল্প-গ্রেড কম্পাস PNI RM3100 সংহত করে যা উচ্চ রেজোলিউশন, কম বিদ্যুত খরচ, কোন হিস্টেরেসিস, বড় গতিশীল পরিসীমা এবং উচ্চ নমুনা হার প্রদান করে।

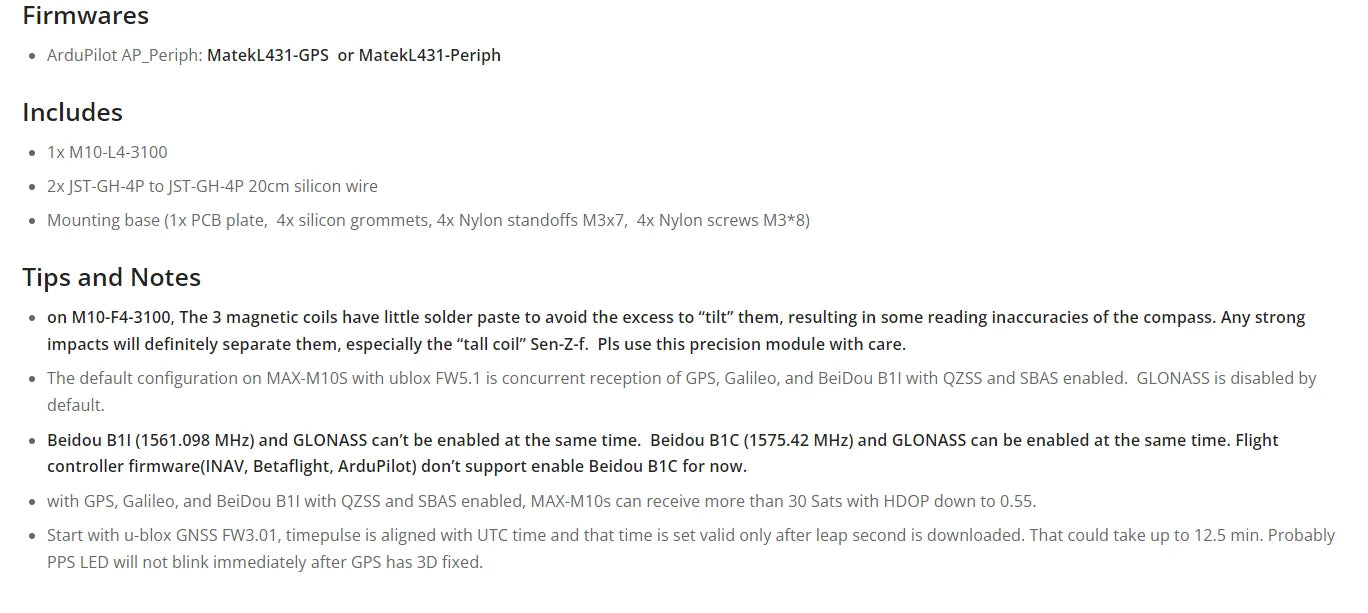
ublox FWS সহ MAX-M1OS-এ ডিফল্ট কনফিগারেশন। কিউজেডএসএস এবং এসবিএএস সক্ষম সহ জিপিএস, গ্যালিলিও এবং বেইডউ বিআই-এর একযোগে অভ্যর্থনা। GLONASS ডিফল্টরূপে Beidou B1I (1575.42 MHz) অক্ষম এবং একই সময়ে সক্ষম করা যাবে না।
CAN (UAVCAN প্রোটোকল) সংযোগ
-
M10-L4-3100 5V — FC 4.5V ~ 5।3V
-
M10-L4-3100 CAN-H — FC CAN উচ্চ
-
M10-L4-3100 CAN-L — FC CAN কম
-
M10-L4-3100 G — FC G/GND
FC UAVCAN প্যারামিটার(ArduPilot)
-
CAN_D1_PROTOCOL -> 1
-
CAN_P1_DRIVER -> 1
-
GPS_TYPE -> 9 (DroneCAN)
-
COMPASS_TYPEMASK -> 0 (নিশ্চিত করুন DroneCAN আনচেক করা হয়েছে)
————————————————————————–
যদি আপনি M10-L4-3100 এর I2C পোর্টে I2C এয়ারস্পিড সেন্সর সংযোগ করেন
-
ARSPD_TYPE -> 8 (UAVCAN)
-
ARSPD_USE -> 1
এবং M10-L4-3100
এর I2C পোর্টের সাথে সংযুক্ত এয়ারস্পিড সেন্সরের জন্য আপনাকে CAN নোড প্যারামিটার সেট করতে হবেমিশন পরিকল্পনাকারী > প্রাথমিক সেটআপ > ঐচ্ছিক হার্ডওয়্যার > UAVCAN > SLCan মোড CAN1 > প্যারামিটার
-
MS4525 ARSP_TYPE -> 1 (hwdef-এ ডিফল্ট)
-
MS5525 ARSP_TYPE -> 3 শুধুমাত্র 0x77 ঠিকানা সহ MS5525 সমর্থন করে
-
SDP3X ARSP_TYPE -> 6
-
DLVR-L10D ARSP_TYPE -> 9
-
লিখুন এবং পুনরায় বুট করুন
————————————————————————–
যদি আপনি 2812LED DIN কে PWM5 প্যাডে সংযোগ করেন
-
NTF_LED_TYPES -> (নিশ্চিত করুন যে DroneCAN চেক করা আছে)
SLCan মোড CAN1 > প্যারামিটার
-
OUT5_FUNCTION 120
-
NTF_LED_TYPES 455
UART (MSP প্রোটোকল) সংযোগ
-
M10-L4-3100 5V — FC 4.0V ~ 5.3V
-
M10-L4-3100 TX2 — FC অতিরিক্ত UART_RX
-
M10-L4-3100 RX2 — FC অতিরিক্ত UART_TX (প্রয়োজনীয় নয়)
-
M10-L4-3100 G — FC G/GND
ArduPilot (4.1.x থেকে) FC প্যারামিটার
-
Serialx_PROTOCOL = 32 (MSP) যেখানে x হল অটোপাইলটে সংযোগের জন্য ব্যবহৃত সিরিয়াল পোর্ট।
-
Serialx_BAUD = 115 যেখানে x হল অটোপাইলটে সংযোগের জন্য ব্যবহৃত সিরিয়াল পোর্ট।
-
GPS TYPE = 19 (MSP)
-
BARO_PROBE_EXT = 4096 (MSP Baro)
-
BARO_PRIMARY = 1 (যদি আপনি প্রাথমিক বারো হিসাবে MSP baro ব্যবহার করতে চান, অন্যথায় ডিফল্ট হিসাবে ছেড়ে দিন)
-
COMPASS_TYPEMASK 0 (বা MSP বিট চেক করা নেই তা নিশ্চিত করুন)
INAV (2.6 থেকে) FC প্যারামিটার
-
M10-L4-3100 একটি অতিরিক্ত UART এর উপর INAV দ্বারা সমর্থিত যেকোনো ফ্লাইট কন্ট্রোলারের সাথে সামঞ্জস্যপূর্ণ৷
-
পোর্ট ট্যাবে, M10-L4-3100 সংযুক্ত UART-এ MSP সক্ষম করুন, সেই UART-এ "GPS" সক্ষম করবেন না। বউড্রেট 115200 নির্বাচন করুন।
-
ফিচার GPS
-
gps_provider = MSP
সেট করুন -
সেট ম্যাগ_হার্ডওয়্যার = MSP
-
সেট baro_hardware = MSP
-
সেট align_mag = CW90, যদি কম্পাস ফ্ল্যাট মাউন্ট করা হয় এবং তীরটি সামনের দিকে থাকে এবং ফ্লাইট কন্ট্রোলার তীরটিও সামনের দিকে থাকে।
Related Collections