MATEK F405-WTE - Mateksys ফ্লাইট কন্ট্রোলার
MATEK F405-WTE - Mateksys ফ্লাইট কন্ট্রোলার
MATEKSYS
পিকআপের উপলভ্যতা লোড করা যায়নি
MATEK F405-WTE - Mateksys ফ্লাইট কন্ট্রোলার স্পেসিফিকেশন
ব্যবহার করুন: যানবাহন এবং রিমোট কন্ট্রোল খেলনা
প্রস্তাবিত বয়স: 12+y,14+y
উৎপত্তি: মেনল্যান্ড চায়না
উপাদান: যৌগিক উপাদান
ব্র্যান্ডের নাম: MATEKSYS
ফ্লাইট কন্ট্রোলার F405-WTE
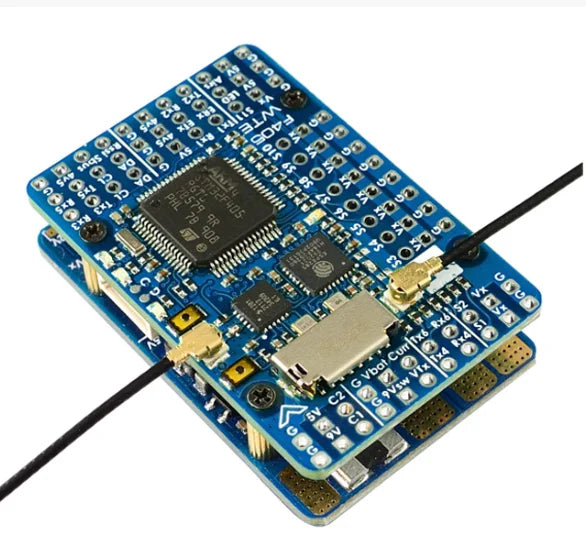
STM32F405RGT6, ICM42688P, SPL06, OSD, ESP WIFI টেলিমেট্রি/ELRS 2.4G রিসিভার, 6xUARTs, 12x PWM,1xI2C
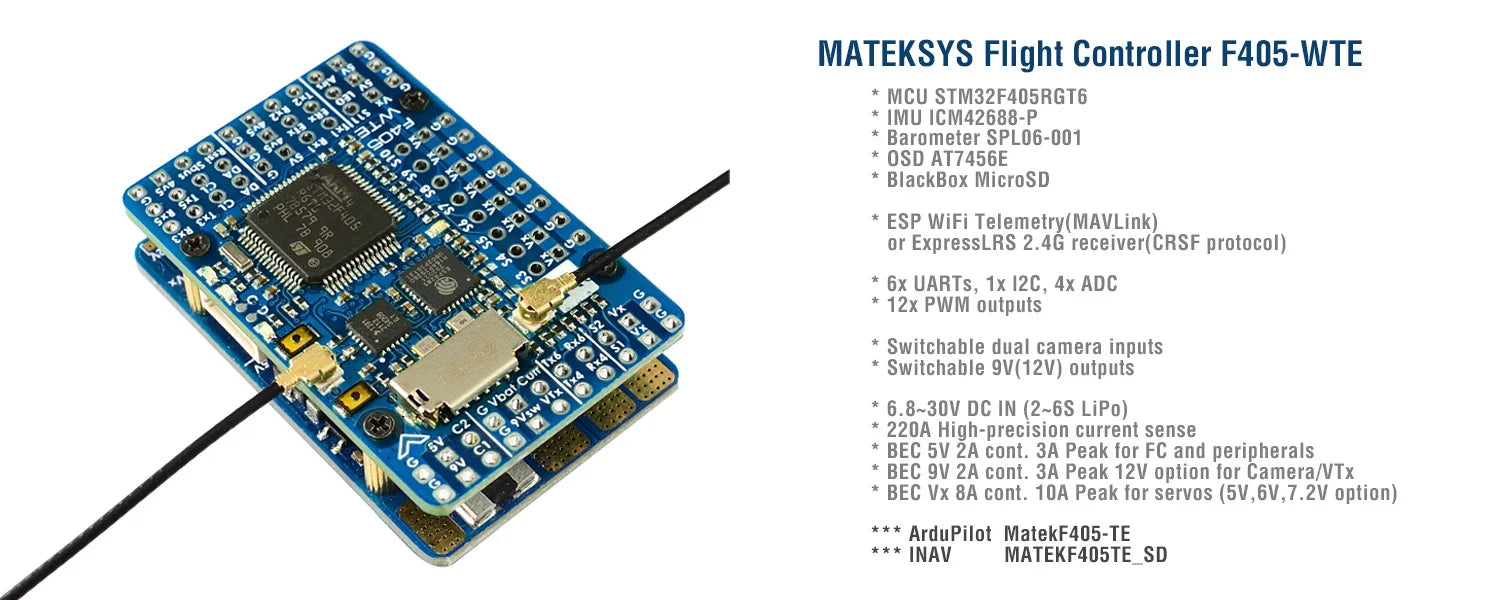
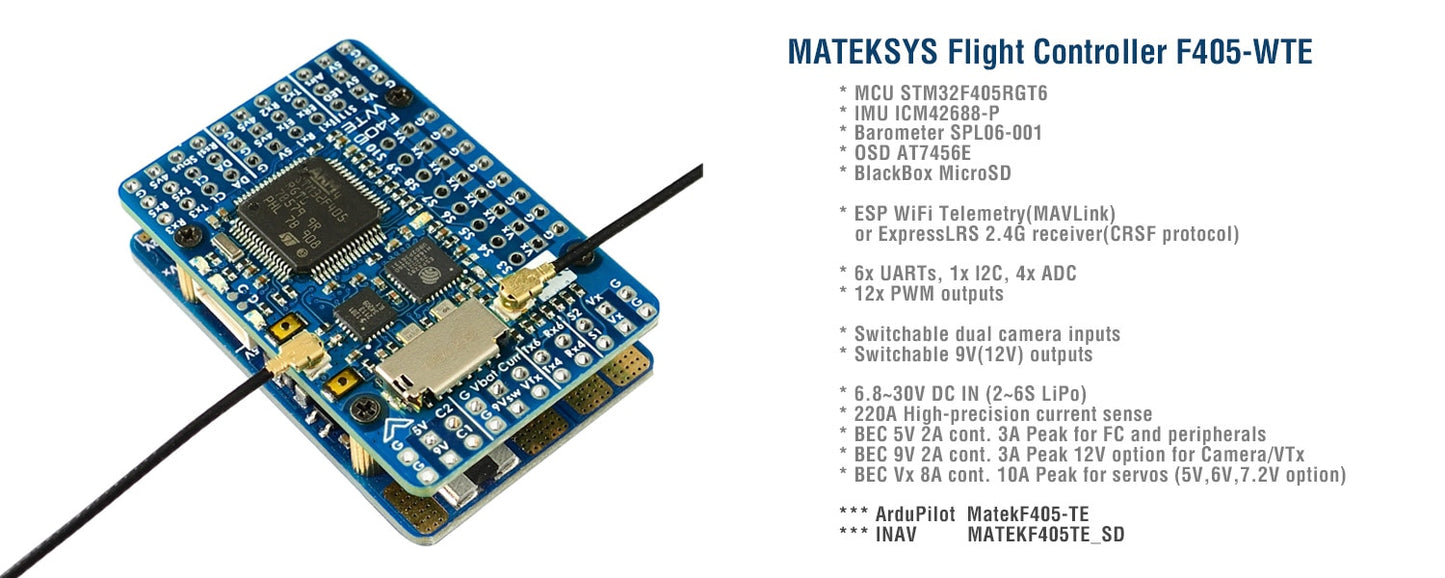
MATEKSYS ফ্লাইট কন্ট্রোলার F4O5-WTE MCU STM3ZFAOSRGT6 IMU ICM42688-P ব্যারোমিটার SPLO6-001 OSD AT7456E ব্ল্যাকবক্স মাইক্রোএসডি 2 8 2 2 ইএসপি ওয়াইফাই টেলিমেট্রি (MAVLx4) (MAVLx4) প্রাপ্ত করতে UARTs, Ix I2C, 4x ADC 85 12x PWM আউটপুট পরিবর্তনযোগ্য ডুয়াল ক্যামেরা ইনপুট 4+

FC স্পেসিফিকেশন
-
MCU: STM32F405RGT6, 168MHz , 1MB ফ্ল্যাশ
-
IMU: ICM42688-P
-
বারো: SPL06-001
-
OSD: AT7456E
-
ব্ল্যাকবক্স: মাইক্রোএসডি কার্ড স্লট
-
ESP ওয়াইফাই টেলিমেট্রি(MAVLink, 14dBm)
-
ExpressLRS 2.4G রিসিভার (CRSF প্রোটোকল, টেলিমেট্রি 12dBm)
-
6x UARTs, 1x Softserial_Tx বিকল্প(INAV)
-
12x PWM আউটপুট
-
1x I2C
-
4x ADC (VBAT, Current, RSSI, Airspeed)
-
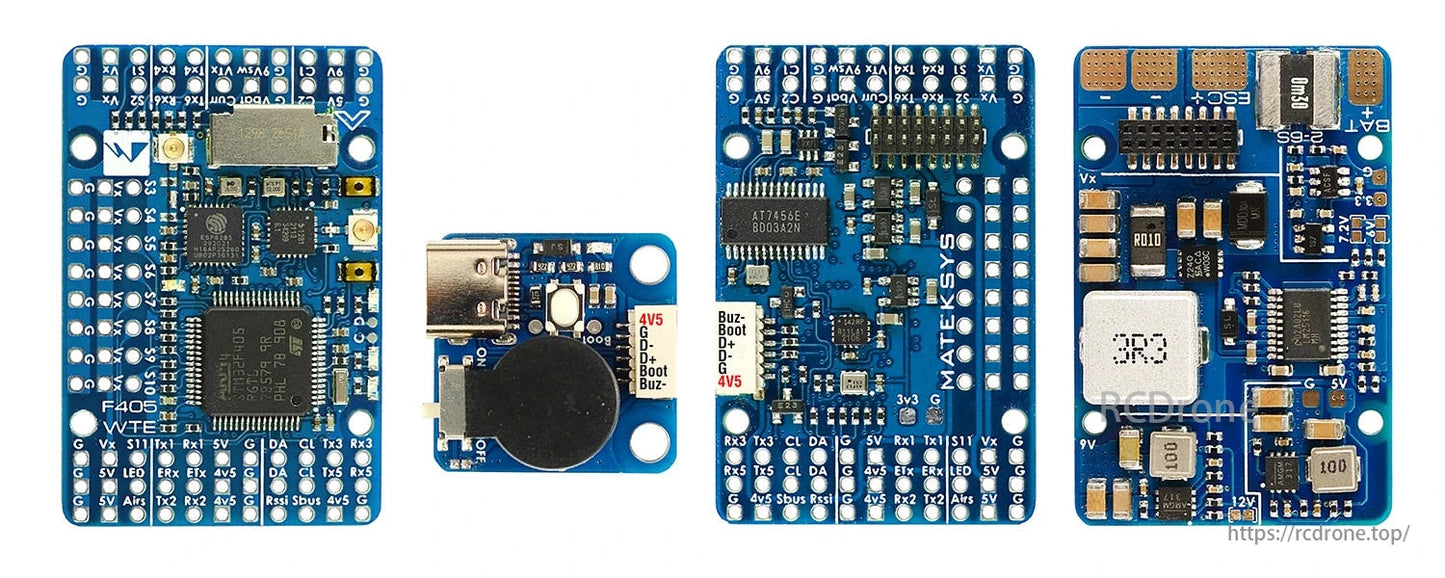
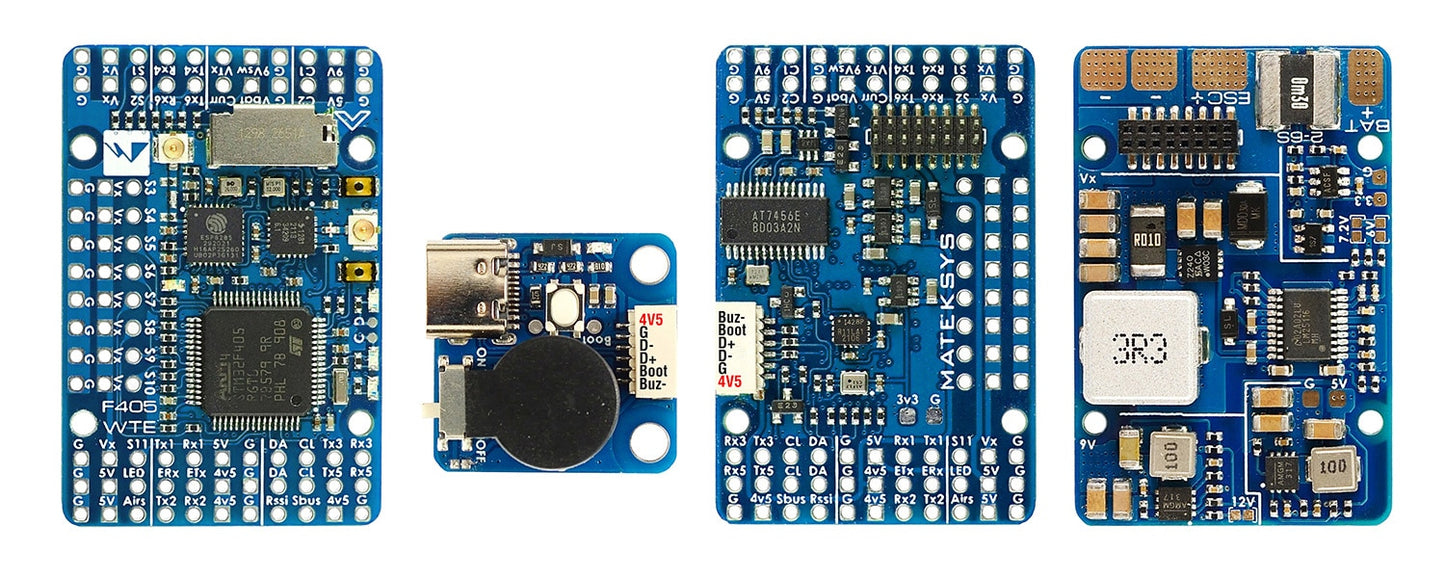
টাইপ-সি(USB2.0) সহ ইউএসবি/বিপ এক্সটেন্ডার
-
ডুয়াল ক্যামেরা ইনপুট সুইচ
-
VTX পাওয়ার সুইচের জন্য 9V(12V)
FC ফার্মওয়্যার
-
ArduPilot: MatekF405-TE
-
INAV: MATEKF405TE_SD (INAV কনফিগারেশন 4.x এ উপলব্ধ নয়)
PDB
-
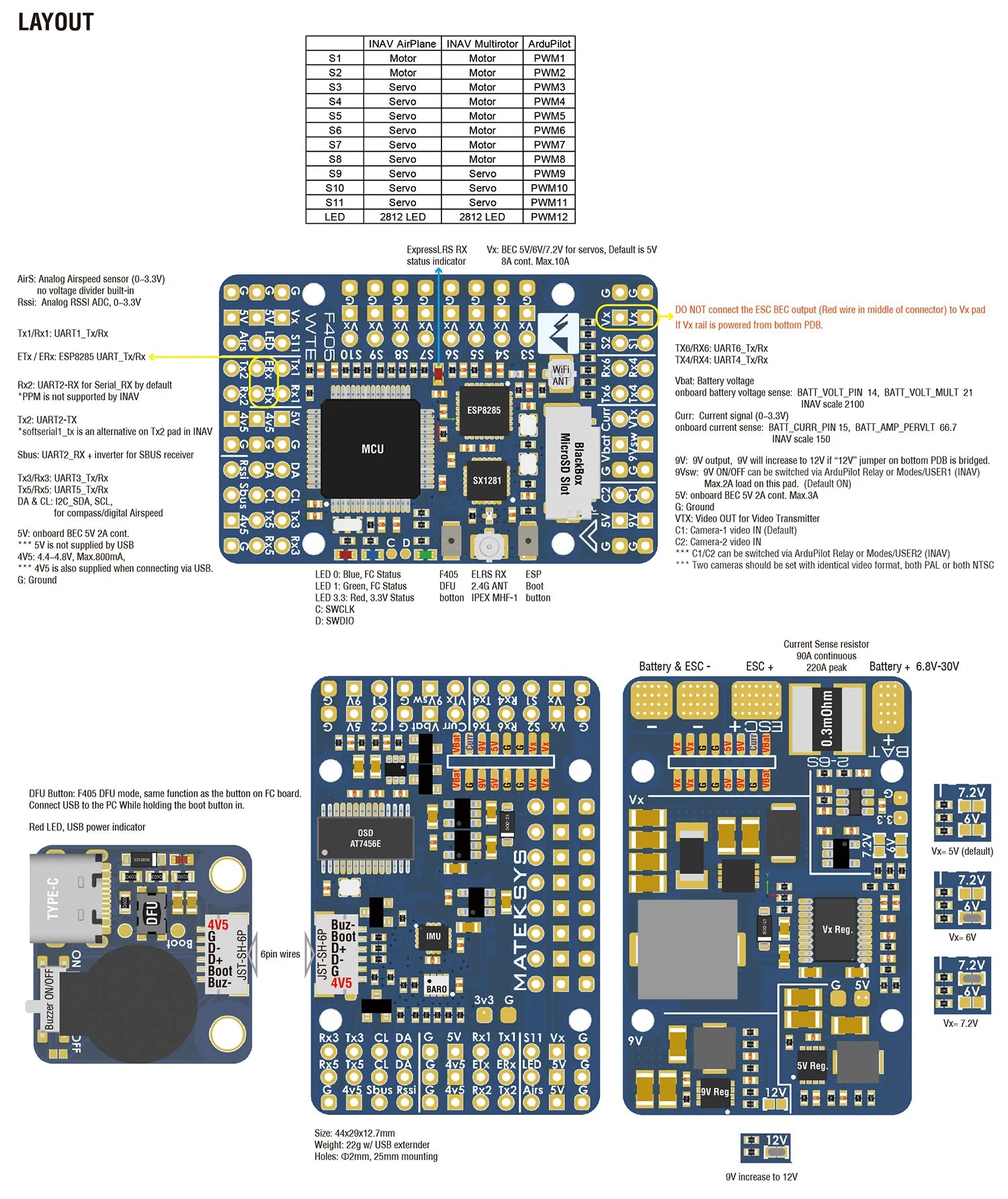
ইনপুট ভোল্টেজ পরিসীমা: 6.8~30V (2~6S LiPo)
-
1x ESC পাওয়ার প্যাড
-
ব্যাটারি ভোল্টেজ বিভাজক 1K:20K (INAV-তে স্কেল 2100, ArduPilot-এ BATT_VOLT_MULT 21.0)
-
বর্তমান সেনর: 220A, 3.3V ADC (INAV তে স্কেল 150, ArduPilot-এ 66.7 A/V)
-
সেন্স প্রতিরোধক: 90A একটানা, 220A পিক
BEC 5V আউটপুট
-
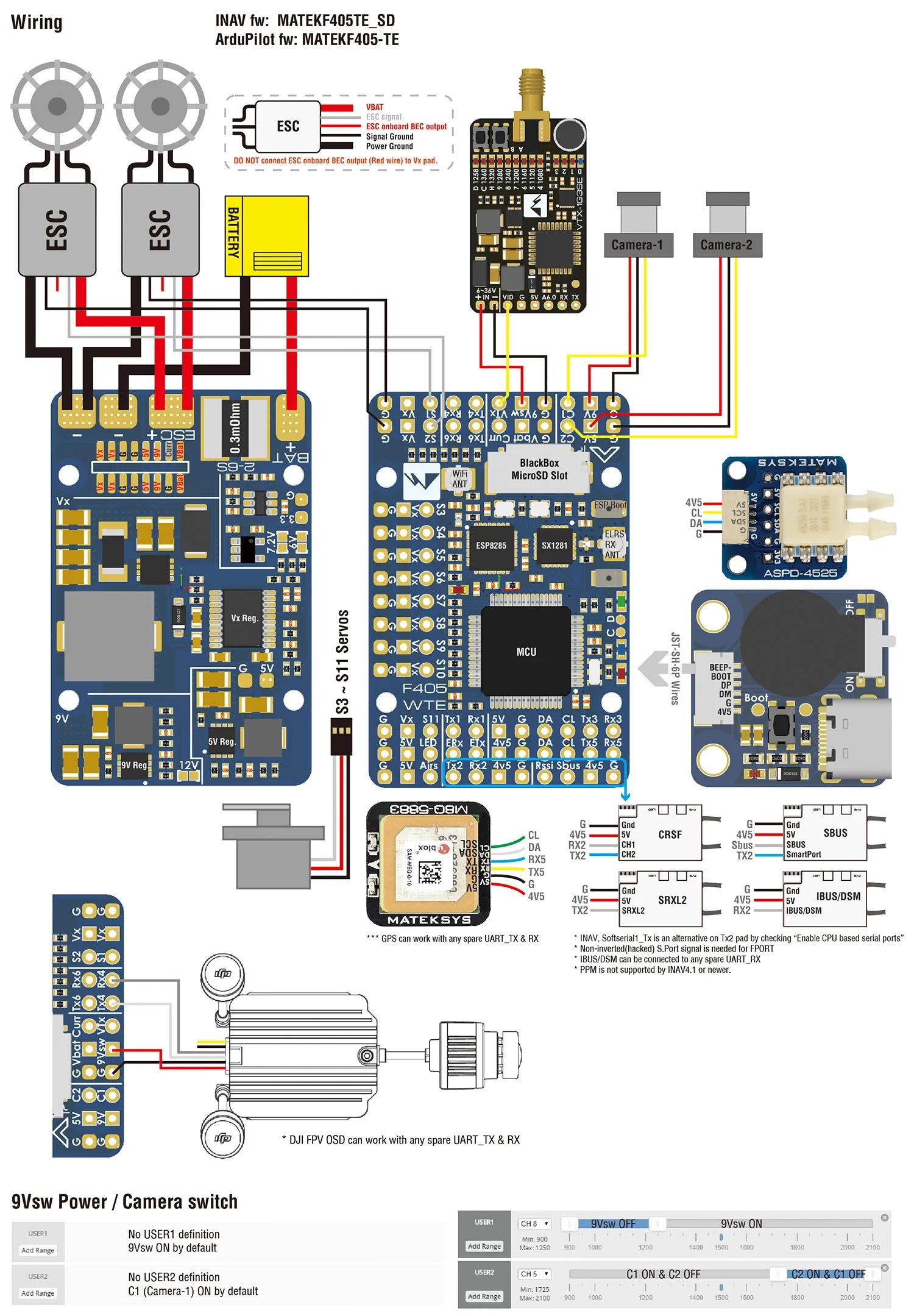
ফ্লাইট কন্ট্রোলার, রিসিভার, OSD, ক্যামেরা, Buzzer, 2812 LED_Strip, Buzzer, GPS মডিউল, AirSpeed এর জন্য ডিজাইন করা হয়েছে
-
অবিচ্ছিন্ন বর্তমান: 2 Amps, Max.3A
BEC 9V /12V আউটপুট
-
ভিডিও ট্রান্সমিটার, ক্যামেরা, জিম্বাল ect এর জন্য ডিজাইন করা হয়েছে।
-
একটানা কারেন্ট: 2 Amps, Max.3A
-
জাম্পার প্যাড
সহ 12V বিকল্প -
স্থিতিশীল 9V/12V আউটপুটের জন্য, ইনপুট ভোল্টেজ হওয়া উচিত > আউটপুট ভোল্টেজ +1V
BEC Vx আউটপুট
-
সার্ভোসের জন্য ডিজাইন করা হয়েছে
-
ভোল্টেজ সামঞ্জস্যযোগ্য, 5V ডিফল্ট, 6V বা 7.2V জাম্পারের মাধ্যমে
-
একটানা বর্তমান: 8 Amps, সর্বোচ্চ.10A
-
স্থিতিশীল Vx আউটপুটের জন্য, ইনপুট ভোল্টেজ হওয়া উচিত > Vx ভোল্টেজ +1V
BEC 3.3V আউটপুট
-
বারো / কম্পাস মডিউল এবং বাহ্যিক 3 এর জন্য ডিজাইন করা হয়েছে।3V পেরিফেরাল
-
লিনিয়ার রেগুলেটর
-
ক্রমাগত বর্তমান: 200mA
শারীরিক
-
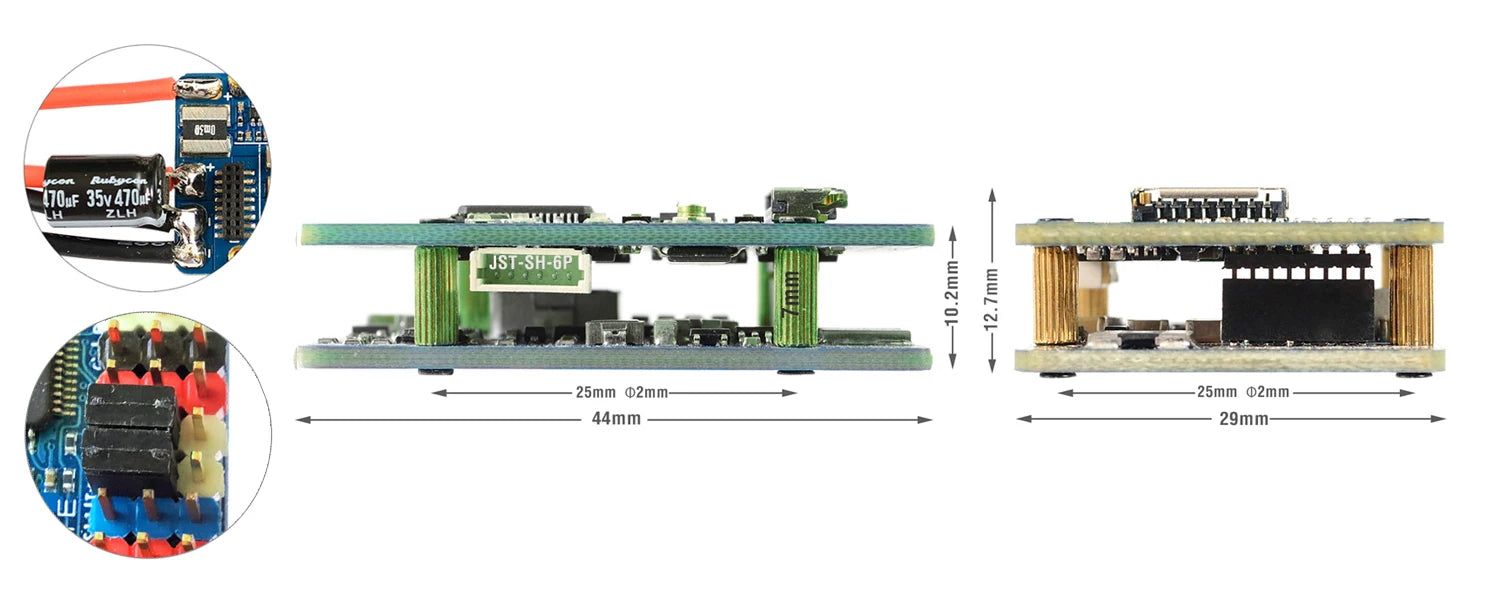
মাউন্ট করা: 25 x 25 মিমি, Φ2 মিমি
-
মাত্রা: 44 x 29 x 12.7 মিমি
-
ওজন: 22g w/ USB/buzzer অ্যাডাপ্টার
সহ
-
1x F405-WTE
-
1x USB(Type-C)/Beep (Passive buzzer) Extender + 20cm JST-SH-6P থেকে JST-SH-6P কেবল USB এক্সটেন্ডারের জন্য৷
-
2x IPEX-MHF1 2.4G অ্যান্টেনা
-
1x Rubycon ZLH 35V 470uF ক্যাপাসিটর
-
ডুপন্ট 2.54 পিন (বোর্ডটি বিক্রি ছাড়াই পাঠানো হয়েছে)
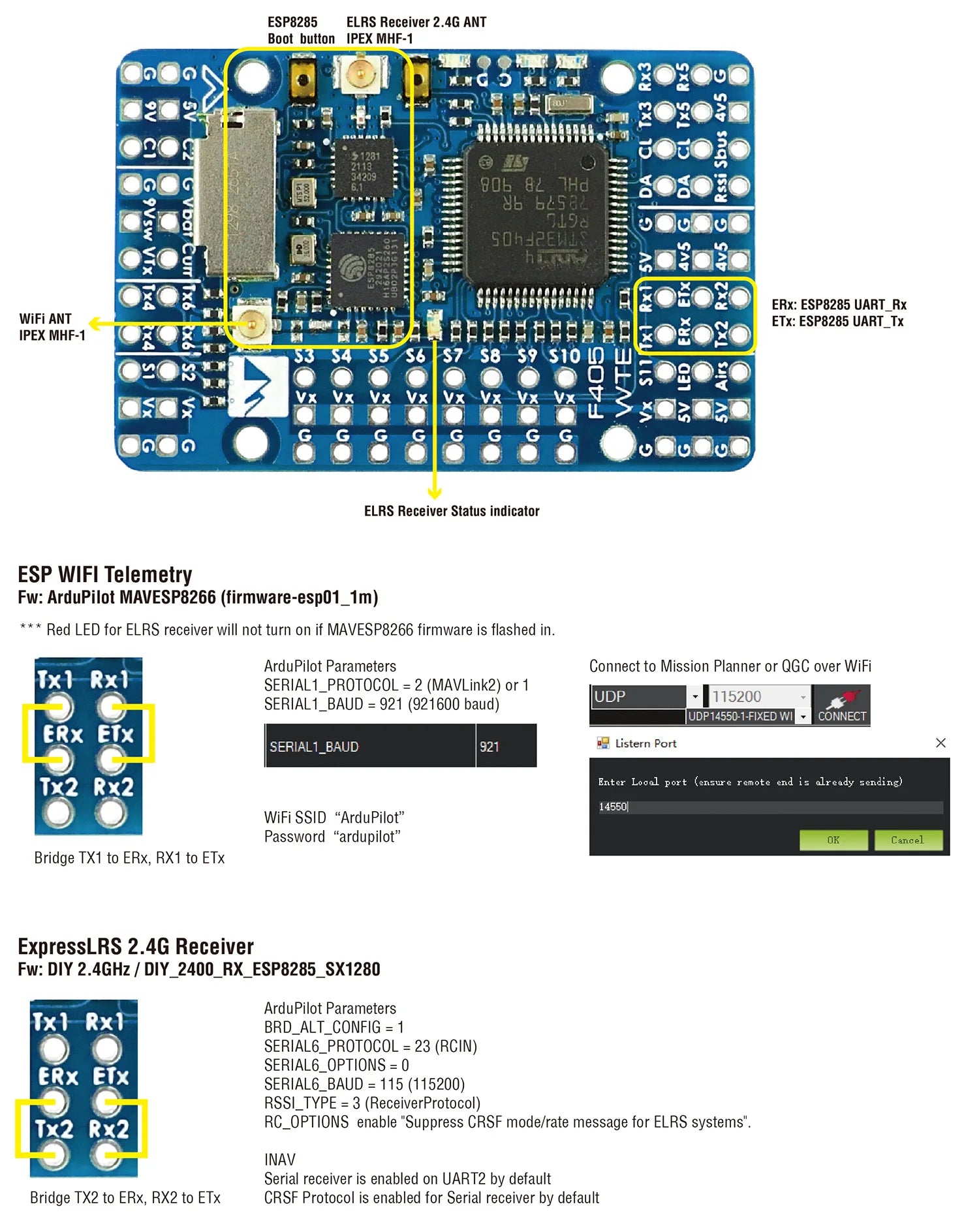
ArduPilot ESP8266 ওয়াইফাই টেলিমেট্রি
-
https://ardupilot.org/copter/docs/common-esp8266-telemetry.html
-
ফার্মওয়্যার: ফার্মওয়্যার-esp01_1m.bin
-
ESP_NodeMCU-PyFlasher দিয়ে ফ্ল্যাশিং
-
USB-TTL অ্যাডাপ্টারে ESP8285(ETx, ERx) ওয়্যার করুন, F405-WTE-তে ETx USB-TTL-এ Rx-এর সাথে সংযুক্ত এবং ERx USB-TTL-এর Tx-এর সাথে সংযুক্ত৷ ওয়্যার 4v5 এবং GND-এর F405-WTE থেকে 5V এবং USB-TTL এর GND
-
ইএসপি8285 বুট বোতাম টিপে ও ধরে রাখার সময় পিসিতে USB-TTL অ্যাডাপ্টার সংযুক্ত করুন।
-
ESP_NodeMCU-PyFlasher খুলুন
-
সিলেক্ট করুন সিরিয়াল পোর্ট ইউএসবি-টিটিএল মডিউলের, ফার্মওয়্যার লোড করুন, “ডুয়াল আউটপুট(DOUT)”<158><28158> নির্বাচন করুন t28182>হ্যাঁ. সমস্ত ডেটা মুছে দেয়“
-
ক্লিক করুন “ফ্ল্যাশ নোডMCU“
-
ফ্ল্যাশ করার পরে, পাওয়ার বন্ধ করুন, তারপর USB বা ব্যাটারির মাধ্যমে F405-WTE চালু করুন।
-
কয়েক সেকেন্ড অপেক্ষা করুন, WiFi SSID “ArduPilot” অনুসন্ধান করুন এবং পাসওয়ার্ড হল “ardupilot”
-
টিপস: ELRS রিসিভারের জন্য লাল LED চালু হবে না যদি MAVESP8266 ফার্মওয়্যার ফ্ল্যাশ হয়।
-
ExpressLRS 2.4G রিসিভার
- CH
-
ওয়াইফাই এর মাধ্যমে ফ্ল্যাশিং
-
ইউএসবি দ্বারা F405-WTE-তে পাওয়ার, রিসিভারের LED(লাল) প্রথমে ধীর গতিতে ব্লিঙ্ক করবে এবং 30s পরে, এটি ওয়াইফাই হটস্পট মোডে রয়েছে তা নির্দেশ করে দ্রুত ব্লিঙ্ক করা উচিত।
-
আরো বিশদ ধাপ, অনুগ্রহ করে দেখুন এই পৃষ্ঠাটি।
-
লক্ষ্য: DIY 2.4GHz / DIY_2400_RX_ESP8285_SX1280
-
-
UARTএর মাধ্যমে ফ্ল্যাশিং
-
USB-TTL অ্যাডাপ্টারের মধ্যে ESP8285(ETx, ERx) ওয়্যার করুন, F405-WTE-তে ETx USB-TTL-এর Rx-এর সাথে সংযুক্ত এবং ERx USB-TTL-এর Tx-এর সাথে সংযুক্ত৷ ওয়্যার 4v5 এবং F405-WTE-এর GND থেকে 5V এবং USB-TTL-এর GND৷
-
ইএসপি8285 বুট বোতাম টিপে ও ধরে রাখার সময় USB-TTL অ্যাডাপ্টারকে পিসিতে সংযুক্ত করুন।
-
টার্গেট নির্বাচন করুন DIY 2।4GHz />> 35039>UART” ফ্ল্যাশিং পদ্ধতির জন্য, আপনার বাঁধাই শব্দবন্ধ সেট করুন এবং ফার্মওয়্যার বিকল্প এবং হয়ে গেলে, বিল্ড এবং ফ্ল্যাশ এ ক্লিক করুন।
-
ওয়াইফাই এর মাধ্যমে INAV কনফিগারারের সাথে UDP সংযোগ
-
সরঞ্জাম: ESP_NodeMCU-PyFlasher.exe
-
ফার্মওয়্যার: MSPWifiBridge_ESP-01.bin github.com/Scavanger/MSPWifiBridge
এর উপর ভিত্তি করে সংকলিত -
ESP_NodeMCU-PyFlasher দিয়ে ফ্ল্যাশিং
-
USB-TTL অ্যাডাপ্টারে ESP8285(ETx, ERx) ওয়্যার করুন, F405-WTE-তে ETx USB-TTL-এ Rx-এর সাথে সংযুক্ত এবং ERx USB-TTL-এর Tx-এর সাথে সংযুক্ত৷ ওয়্যার 4v5 এবং F405-WTE থেকে 5V এর GND এবং USB-TTL
এর GND -
ইএসপি8285 বুট বোতাম টিপে ও ধরে রাখার সময় USB-TTL অ্যাডাপ্টারকে পিসিতে সংযুক্ত করুন।
-
ESP_NodeMCU-PyFlasher খুলুন
-
সিলেক্ট করুন সিরিয়াল পোর্ট ইউএসবি-টিটিএল মডিউলের, ফার্মওয়্যার লোড করুন, “ডুয়াল আউটপুট(DOUT) <40617> নির্বাচন করুন t40641>হ্যাঁ.সব ডেটা মুছে দেয়“
-
ক্লিক করুন “ফ্ল্যাশ নোডMCU“
-
ফ্ল্যাশ করার পরে, পাওয়ার বন্ধ করুন, তারপর USB বা ব্যাটারির মাধ্যমে F405-WTE চালু করুন।
-
কয়েক সেকেন্ড অপেক্ষা করুন, WiFi SSID “MSPWifiBridge” খুঁজুন এবং পাসওয়ার্ড হল “123456789
<418> <418> <418> -
যদি কনফিগারেশন পৃষ্ঠায় স্বয়ংক্রিয়ভাবে ফরওয়ার্ডিং না থাকে, তাহলে http://192.168.4.1 ম্যানুয়ালি যান। স্ট্যান্ডার্ড লগইন ডেটা: ব্যবহারকারীর নাম: প্রশাসন, পাসওয়ার্ড: 1235t><45t<45 >
-
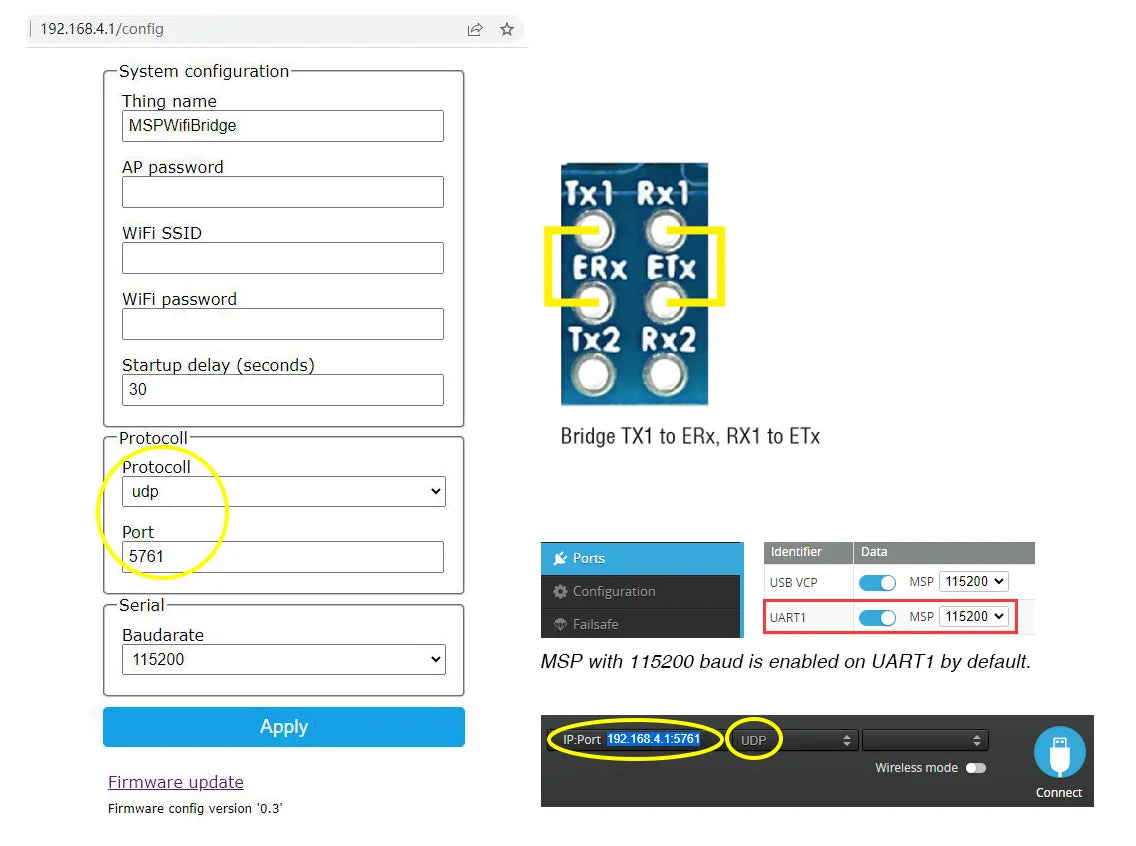
192.168.4.1/config সিস্টেম কনফিগারেশন Thing_name MSPWifiBridge AP পাসওয়ার্ড Ixl Rx| ওয়াইফাই SSID ERx ETx ওয়াইফাই পাসওয়ার্ড Tx2 Rx2 Staz বিলম্ব (সেকেন্ড 30 প্রোটোকল ব্রিজ TX1 থেকে erx, RXI থেকে ETx প্রোটোকল udp পোর্ট 5761 পন্ট শনাক্তকারী ডেটা USB VC?
Related Collections