MATEKSYS M9N-5883 GNSS ও কম্পাস GPS মডিউল, u-blox NEO-M9N + QMC5883L, JST-GH-6P
MATEKSYS M9N-5883 GNSS ও কম্পাস GPS মডিউল, u-blox NEO-M9N + QMC5883L, JST-GH-6P
MATEKSYS
পিকআপের উপলভ্যতা লোড করা যায়নি
সারসংক্ষেপ
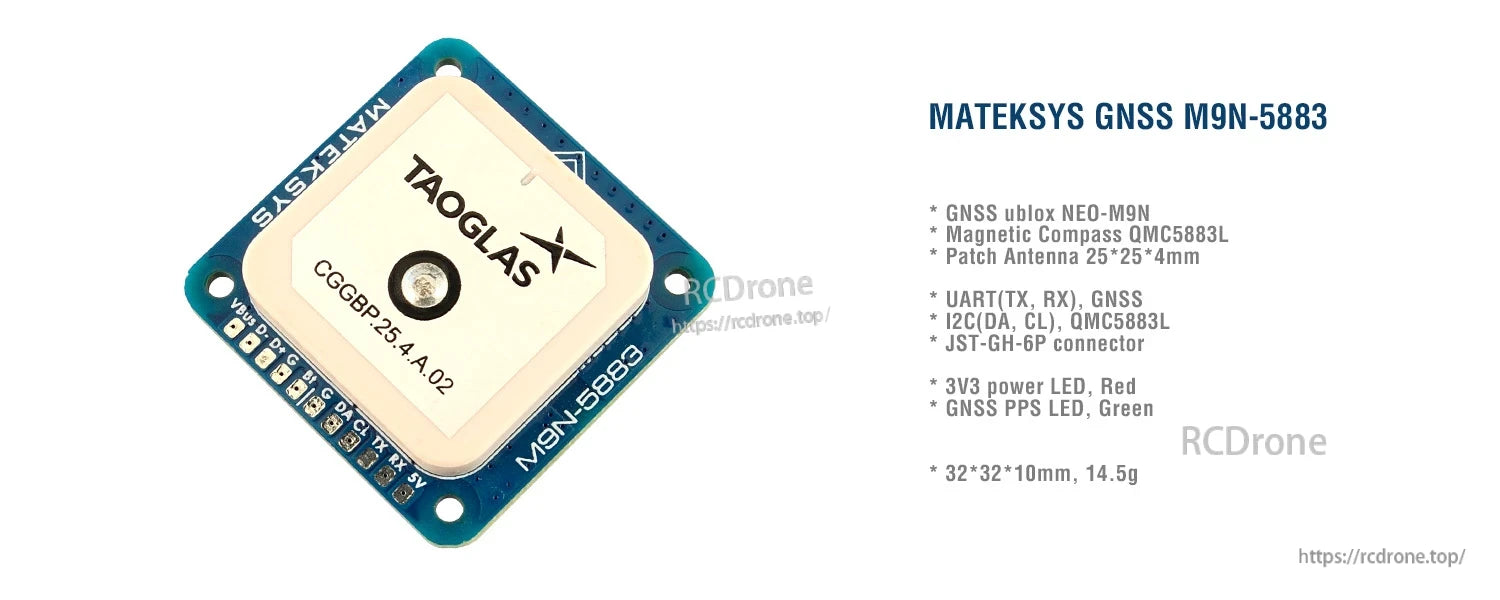
MATEKSYS M9N-5883 GNSS &কম্পাস GPS মডিউল হল একটি মাল্টি-কনস্টেলেশন GNSS রিসিভার যা u-blox NEO-M9N এর উপর ভিত্তি করে তৈরি, যা একটি QMC5883L চৌম্বক কম্পাসের সাথে সংযুক্ত। একটি মাল্টি-ব্যান্ড RF ফ্রন্ট-এন্ড আর্কিটেকচারের সাথে, এটি একসাথে GPS, গ্যালিলিও, GLONASS, এবং BeiDou গ্রহণ করতে সক্ষম।
মূল বৈশিষ্ট্যসমূহ
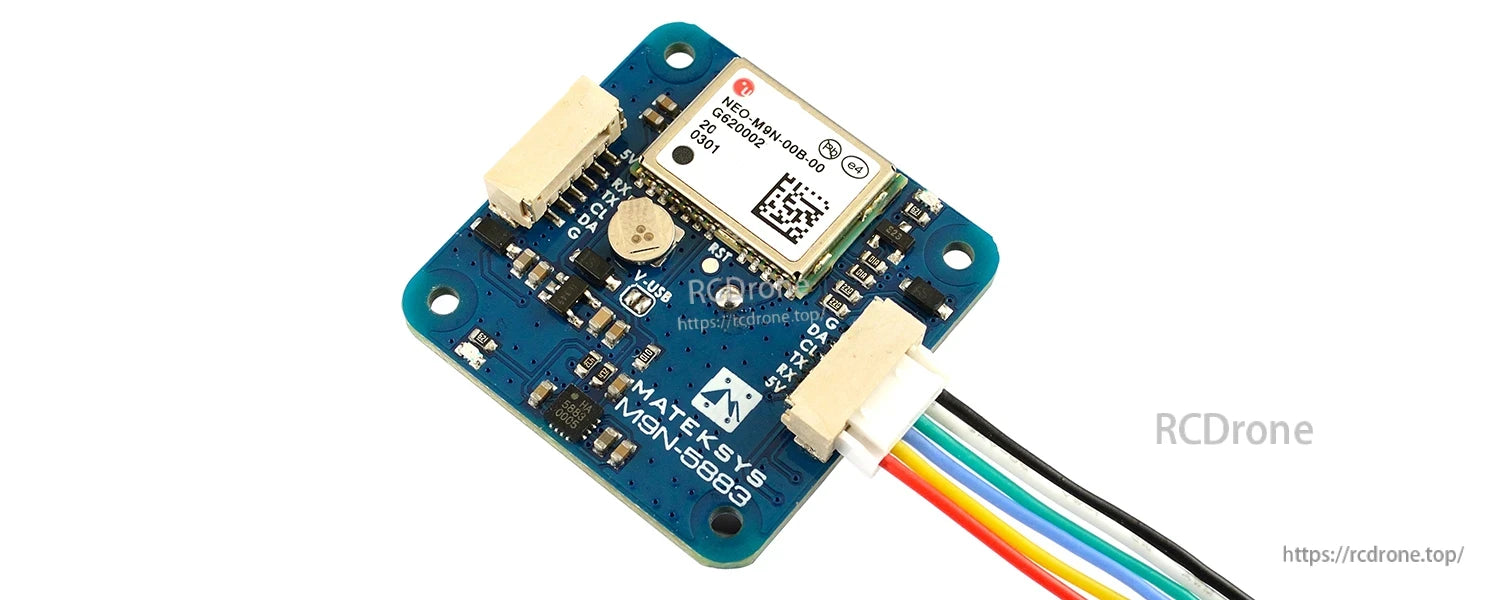
- GNSS: u-blox NEO-M9N একসাথে রিসিভার (GPS, GLONASS, গ্যালিলিও, BeiDou)
- চৌম্বক কম্পাস: QMC5883L
- ইন্টারফেস: GNSS এর জন্য UART (TX, RX); কম্পাসের জন্য I2C (DA, CL)
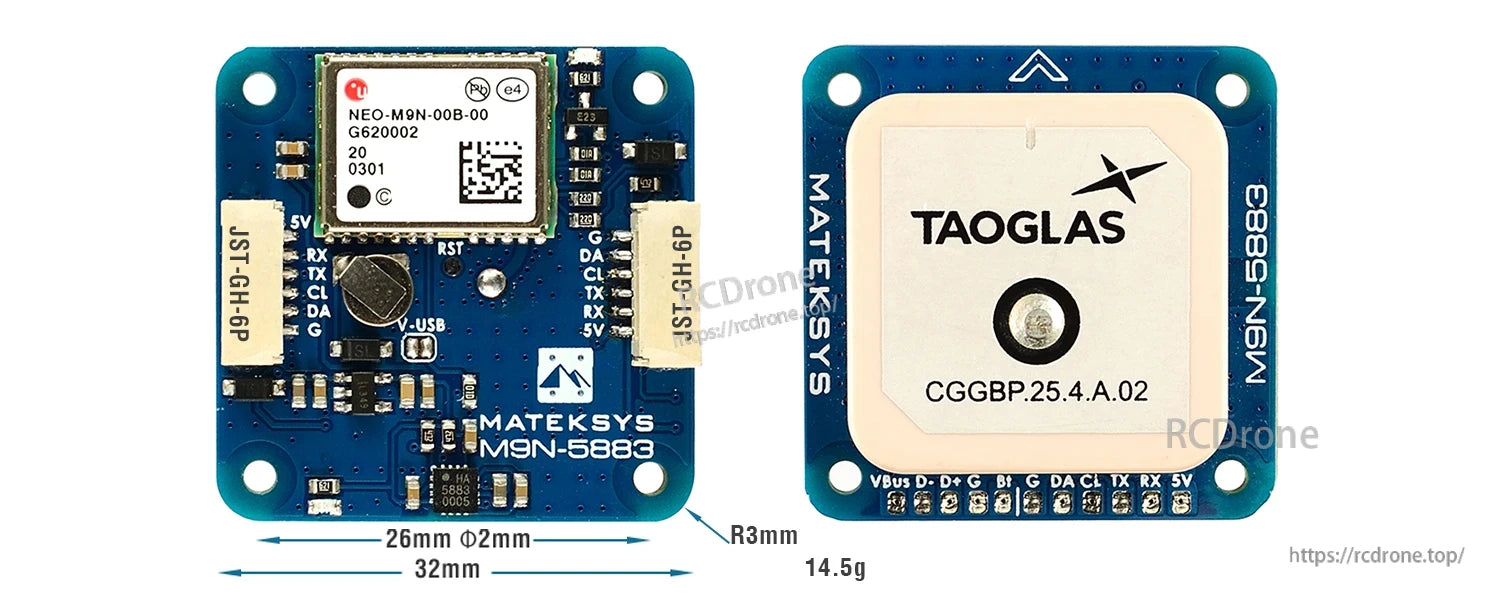
- JST-GH-6P সংযোগকারী
- স্থিতি LED: 3.3V পাওয়ার LED (লাল); GNSS PPS LED (সবুজ), যখন GNSS এর 3D ফিক্স থাকে তখন ঝলকায় (1Hz)
- রিসিভার রিসেট: "RST" প্যাডকে গ্রাউন্ডের সাথে 100 ms এর জন্য সংযুক্ত করলে একটি ঠান্ডা শুরু (পুনরুদ্ধার বিকল্প) ট্রিগার হয়
গ্রাহক সেবা: [email protected] (অথবা https://rcdrone.top/).
স্পেসিফিকেশন
| জিএনএসএস রিসিভার | u-blox NEO-M9N |
| সমর্থিত কনস্টেলেশন | জিপিএস, গ্লোনাস, গ্যালিলিও, বেইডু |
| চৌম্বক কম্পাস | QMC5883L |
| প্যাচ অ্যান্টেনা | ২৫*২৫*৪মিমি |
| ইনপুট ভোল্টেজ পরিসর | ৪~৫।5V (5V প্যাড/পিন) |
| শক্তি খরচ | 50mA |
| UART বডরেট | 38400 ডিফল্ট |
| অপারেটিং তাপমাত্রা | -20~80 °C |
| GNSS ইন্টারফেস | UART (TX, RX) |
| কম্পাস ইন্টারফেস | I2C (DA, CL) |
| কনেক্টর | JST-GH-6P |
| LED নির্দেশক | 3.3V পাওয়ার LED (লাল); GNSS PPS LED (সবুজ), যখন GNSS 3D ফিক্সড থাকে তখন ঝলকায় (1Hz) |
| আকার | 32mm*32mm*10mm |
| ওজন | 14.5g |
| মাউন্টিং বিস্তারিত (যেমন দেখানো হয়েছে) | ২৬মিমি; গর্তের ব্যাস: Φ২মিমি; R৩মিমি |
কি অন্তর্ভুক্ত আছে
- ১x M9N-5883
- ১x JST-GH-6P থেকে JST-GH-6P ২০সেমি সিলিকন তার
তারের সংযোগ এবং সেটিংস
- M9N-5883 ৫V থেকে ফ্লাইট কন্ট্রোলার ৪~৫.৫V
- M9N-5883 RX থেকে ফ্লাইট কন্ট্রোলার UART_TX
- M9N-5883 TX থেকে ফ্লাইট কন্ট্রোলার UART_RX
- M9N-5883 CL থেকে ফ্লাইট কন্ট্রোলার I2C_SCL
- M9N-5883 DA থেকে ফ্লাইট কন্ট্রোলার I2C_SDA
- M9N-5883 G থেকে ফ্লাইট কন্ট্রোলার GND
টিপস এবং নোটস
-
কম্পাস অ্যালাইনমেন্ট (ফ্ল্যাট মাউন্টিং): ম্যাগনেটোমিটারকে টিল্ট করা কঠোরভাবে নিষিদ্ধ!
- INAV/Betaflight: কম্পাস তীর সামনে, ফ্লাইট কন্ট্রোলার তীর সামনে থাকলে CW 270° ফ্লিপ সেট করুন।
- INAV/Betaflight: কম্পাসের তীর পিছনের দিকে, ফ্লাইট কন্ট্রোলারের তীর সামনে থাকলে CW 90° ফ্লিপ সেট করুন।
- ArduPilot/Mission Planner: রোটেশন নেই।
- কম্পাস/ম্যাগনেটোমিটারকে পাওয়ার লাইন/ESC/মোটর/লোহার ভিত্তিক উপকরণ থেকে 10 সেমি দূরে রাখুন।
- INAV 5.0.0, Betaflight 4.3.0, ArduPilot 4.3 বা নতুন সংস্করণ প্রয়োজন।
- NEO-M9N, MAX-M10S, SAM-M10Q সিরিজে ডেটাফ্ল্যাশ অন্তর্নির্মিত নেই; একবার GNSS বন্ধ হলে এবং সুপারক্যাপাসিটর শেষ হলে, সেটিংস ডিফল্টে ফিরে আসে।
- UBX প্রোটোকল দ্বিমুখী; ফ্লাইট কন্ট্রোলার ফার্মওয়্যার GPS-এ UBX প্রোটোকল মাধ্যমে সেটিংস পরিবর্তন করতে পারে (u-center-এ GNSS মডিউল প্যারামিটার সেট করার প্রয়োজন নেই)।
- GNSS FW3.01 থেকে: টাইমপালস UTC সময়ের সাথে সঙ্গতিপূর্ণ; লিপ সেকেন্ড ডাউনলোড হওয়ার পর সময় বৈধ হয় (12.5 মিনিট পর্যন্ত সময় লাগতে পারে)। PPS LED 3D ফিক্সের পরে তাত্ক্ষণিকভাবে ঝলকাতে নাও পারে।
- রিসেট: “RST” প্যাডকে গ্রাউন্ডের সাথে 100 ms এর জন্য সংযুক্ত করলে একটি ঠান্ডা শুরু হয়। রিসেট সমস্ত তথ্য মুছে দেয় এবং একটি ঠান্ডা শুরু ট্রিগার করে; শুধুমাত্র পুনরুদ্ধার বিকল্প হিসেবে ব্যবহার করুন যদি তারের/সেটআপ সঠিক হয় কিন্তু কন্ট্রোলার GNSS মডিউল সনাক্ত করতে না পারে।
- সিরামিক অ্যান্টেনার উপর খোঁচা অ্যান্টেনা টিউন করার ফলস্বরূপ।
ম্যানুয়াল
- M9N-5883_step.zip
- GPS সম্পর্কিত সমস্যা সমাধান করুন: https://www.mateksys.com/?p=5712#tab-id-6
- u-center Windows
বিস্তারিত
MATEKSYS GNSS M9N-5883 একটি u-blox NEO-M9N রিসিভার এবং QMC5883L কম্পাসকে JST-GH 6-পিন পোর্টের মাধ্যমে UART এবং I2C সংযোগের সাথে সংযুক্ত করে।
MATEKSYS M9N-5883 একটি u-blox NEO-M9N GNSS রিসিভার এবং 5883 কম্পাসকে 32mm বোর্ডে TAOGLAS প্যাচ অ্যান্টেনা এবং JST-GH 6-পিন সংযোগকারীর সাথে সংযুক্ত করে।
MATEKSYS M9N-5883 GNSS এবং কম্পাস মডিউলটি সরল GPS এবং I2C তারের জন্য JST সংযোগকারক সহ একটি সংক্ষিপ্ত বোর্ড লেআউট ব্যবহার করে।
Related Collections