

MUWEIDU K4028 মোটর ১২ভি FOC সার্ভো ব্রাশলেস ডিসি মোটর, ১৮বিট এনকোডার, RS485/CAN, ৫৬০rpm
MUWEIDU K4028 মোটর ১২ভি FOC সার্ভো ব্রাশলেস ডিসি মোটর, ১৮বিট এনকোডার, RS485/CAN, ৫৬০rpm
MUWEIDU
পিকআপের উপলভ্যতা লোড করা যায়নি
অভিধান
MUWEIDU K4028 মোটর একটি K সিরিজের মধ্য-থেকে-উচ্চ গতির ব্রাশলেস DC মোটর যা একটি উচ্চ-কার্যকারিতা FOC সার্ভো মোটর হিসেবে ডিজাইন করা হয়েছে একটি সংযুক্ত বৈদ্যুতিক ড্রাইভ ধারণার সাথে। এটি 18-বিট এনকোডার সহ নির্দিষ্ট করা হয়েছে, গতি/অবস্থান নিয়ন্ত্রণ সমর্থন করে, এবং রোবোটিক্স এবং স্বয়ংক্রিয়করণ সিস্টেমে সংহত করার জন্য RS485 বা CAN এর মাধ্যমে যোগাযোগ করে।
মূল বৈশিষ্ট্য
- K সিরিজ মাঝারি থেকে উচ্চ গতির ব্রাশলেস DC মোটর; উচ্চ-কার্যকারিতা FOC সার্ভো মোটর
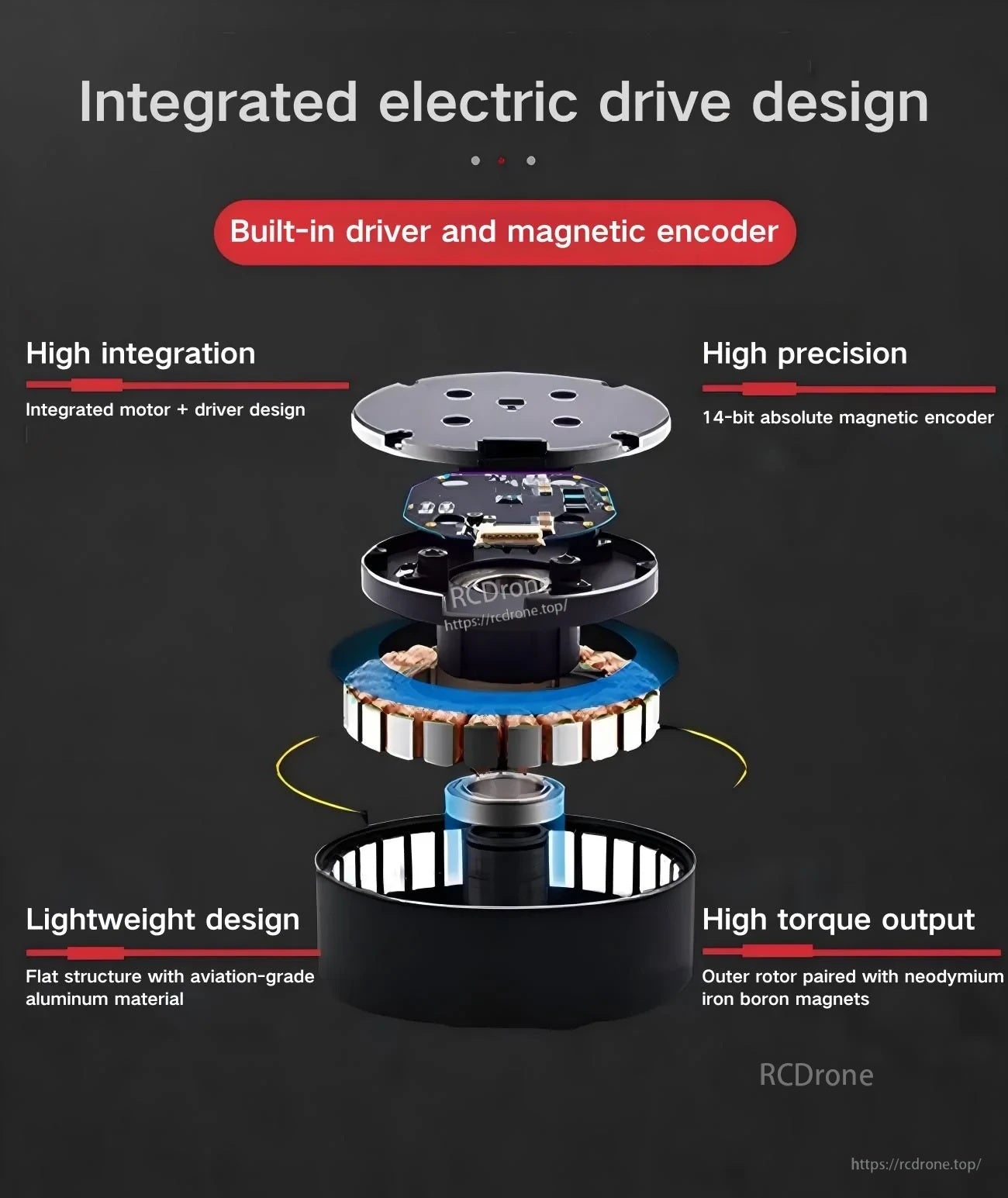
- একীভূত বৈদ্যুতিক ড্রাইভ ডিজাইন; বিল্ট-ইন ড্রাইভার এবং চৌম্বক এনকোডার
- একীভূত মোটর + ড্রাইভার ডিজাইন
- হালকা, সমতল গঠন যা বিমান-গ্রেড অ্যালুমিনিয়াম উপাদান দ্বারা তৈরি
- উচ্চ টর্ক আউটপুট; বাইরের রোটর নিওডিমিয়াম আয়রন বোরন চুম্বকগুলির সাথে যুক্ত
- মোটরের তাপমাত্রা পর্যবেক্ষণ: হ্যাঁ
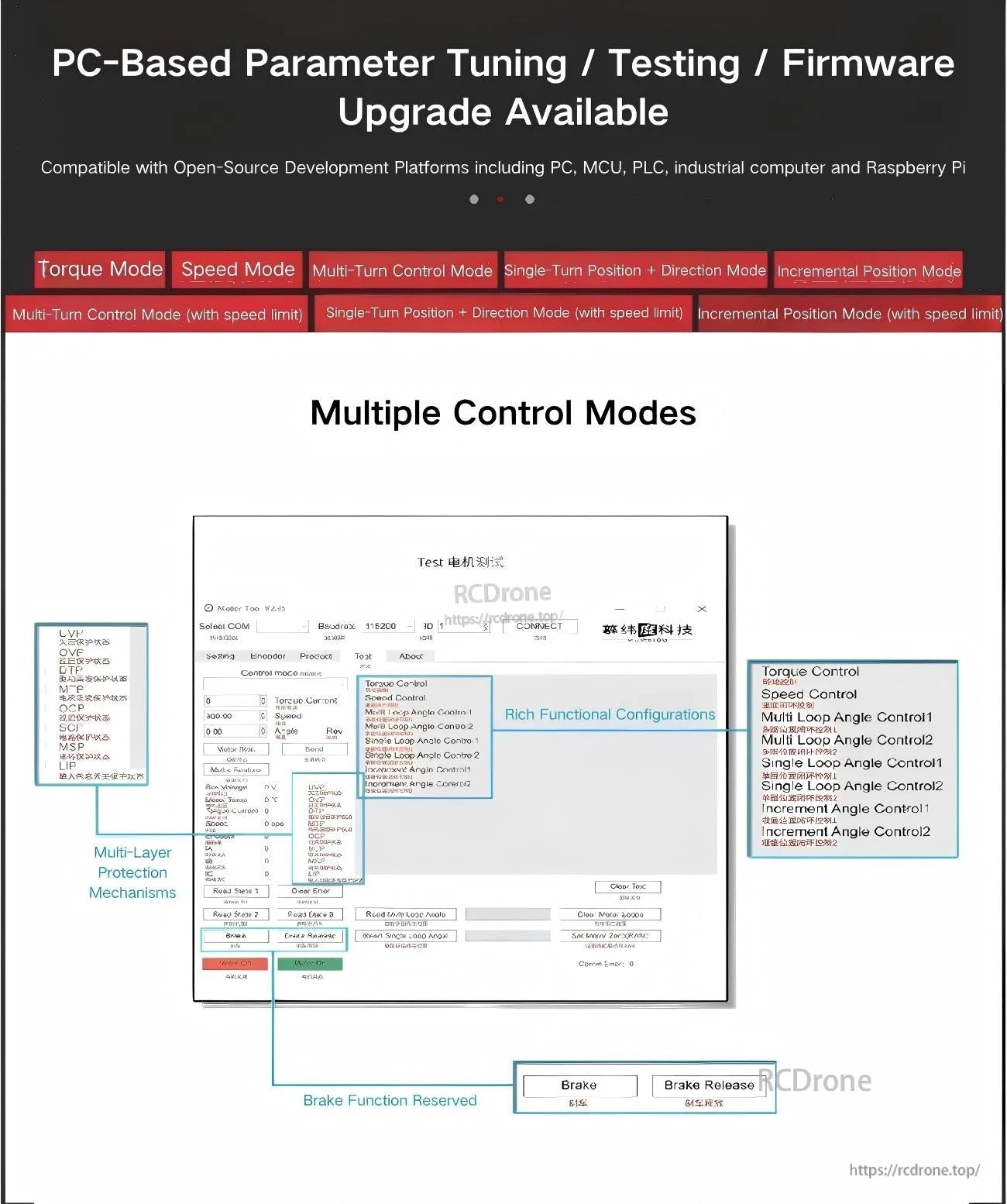
- বহুবিধ নিয়ন্ত্রণ মোড প্রদর্শিত: টর্ক মোড, গতি মোড, মাল্টি-টার্ন নিয়ন্ত্রণ মোড (গতি সীমা সহ), সিঙ্গল-টার্ন পজিশন + দিক মোড (গতি সীমা সহ), ইনক্রিমেন্টাল পজিশন মোড (গতি সীমা সহ)
- PC-ভিত্তিক প্যারামিটার টিউনিং / পরীক্ষণ / ফার্মওয়্যার আপগ্রেড উপলব্ধ
- PC, MCU, PLC, শিল্প কম্পিউটার এবং রাস্পবেরি পাই সহ ওপেন-সোর্স উন্নয়ন প্ল্যাটফর্মের সাথে সামঞ্জস্যপূর্ণ
- বহু-স্তর সুরক্ষা ব্যবস্থা; ব্রেক ফাংশন সংরক্ষিত (ব্রেক / ব্রেক মুক্তি)
- PWM ইনপুট সমর্থিত
- অপ্টিমাইজড মোটর কগিং টর্ক
- এনকোডার প্রিসিশন আপগ্রেড নোট দেখানো: 14-বিট থেকে 18-বিট
স্পেসিফিকেশন
| মডেল | K4028 |
| রেটেড ভোল্টেজ | 12V |
| রেটেড কারেন্ট | 1.43A |
| শীর্ষ শক্তি | 8.9W |
| রেটেড টর্ক | 0.15 N.m |
| শীর্ষ টর্ক | 0.33 N.m |
| রেটেড স্পিড | 560 rpm |
| এনকোডার | 18বিট |
| রোটর জড়তা | 81 gcm² |
| মোটর তাপমাত্রা পর্যবেক্ষণ | হ্যাঁ |
| নিয়ন্ত্রণ মোড | স্পিড/পজিশন |
| যোগাযোগ প্রোটোকল | RS485 অথবা CAN |
| মোট আকার | Φ39.6mm × 28mm |
| ওজন | 90 g |
ইন্টারফেস সংজ্ঞা (CAN/RS485)
| ইন্টারফেস | নোট |
|---|---|
| B/L | RS485-B অথবা CAN-L |
| A/H | RS485-A অথবা CAN-H |
| V- | নেগেটিভ পাওয়ার সাপ্লাই |
| V- | নেগেটিভ পাওয়ার সাপ্লাই |
| V+ | পজিটিভ পাওয়ার সাপ্লাই |
| V+ | পজিটিভ পাওয়ার সাপ্লাই |
| T | UART ট্রান্সমিটার |
| R | UART রিসিভার |
| G | সিগন্যাল GND |
আইডি সুইচ মোটরের উপর সনাক্তকরণ/সেটিংয়ের জন্য প্রদান করা হয়েছে।
অ্যাপ্লিকেশন
- মানবাকৃতির রোবট
- রোবটিক হাত
- এক্সোস্কেলেটন
- চতুর্ভুজ রোবট
- এজিভি যানবাহন
- এআরইউ রোবট
- পরিদর্শন রোবট সিস্টেম
- হ্যান্ডহেল্ড ক্যামেরা সিস্টেম
- লিডার-সম্পর্কিত প্ল্যাটফর্ম
- গিম্বল পড সিস্টেম
ম্যানুয়াল / ডকুমেন্ট
MUWEIDU K4028 মোটর (RS485/CAN) এর জন্য নির্বাচন নির্দেশিকা বা ইন্টিগ্রেশন সহায়তার জন্য যোগাযোগ করুন [email protected] or পরিদর্শন করুন https://rcdrone.top/.
বিস্তারিত

একটি সমন্বিত বৈদ্যুতিক-ড্রাইভ ধারণার চারপাশে নির্মিত, K4028 একটি কমপ্যাক্ট BLDC মোটর, ড্রাইভার এবং এনকোডারকে সঠিক সার্ভো নিয়ন্ত্রণের জন্য একত্রিত করে।
একটি সব-এক মোটর + ড্রাইভার স্ট্যাক তারের সংখ্যা কমাতে এবং রোবটিক্স এবং অটোমেশন নির্মাণে ইন্টিগ্রেশনকে সহজতর করতে সহায়তা করে।

স্পষ্ট ইন্টারফেস লেবেলিং RS485 বা CAN যোগাযোগের জন্য দ্রুত সেটআপ সমর্থন করে, বাসে ডিভাইস শনাক্তকরণের জন্য একটি ID সুইচ সহ।
পিসি টুলগুলি প্যারামিটার টিউনিং, পরীক্ষণ এবং ফার্মওয়্যার আপগ্রেডের অনুমতি দেয়, বিভিন্ন টর্ক, গতি এবং অবস্থান নিয়ন্ত্রণ মোড উপলব্ধ।
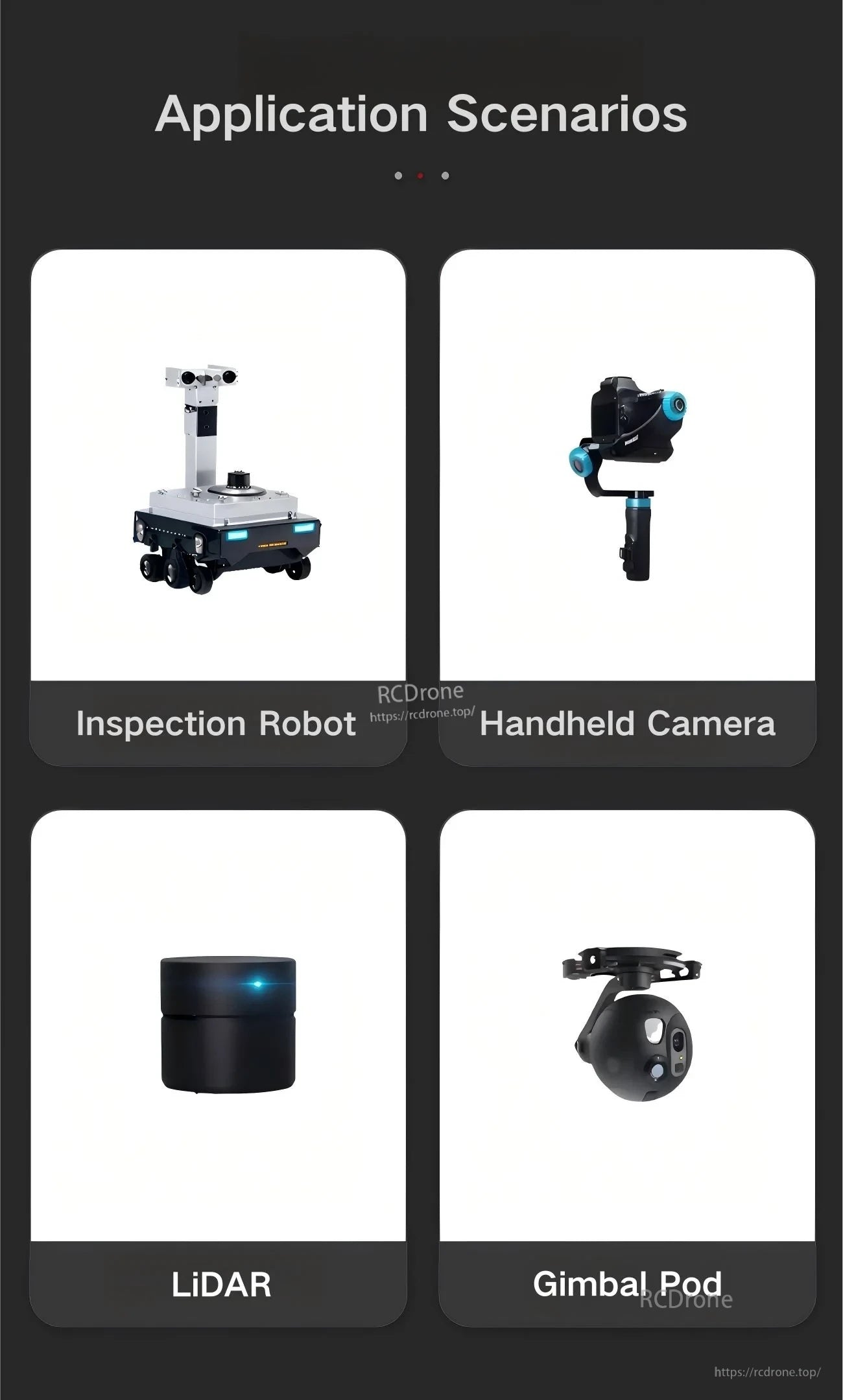
পরীক্ষণ রোবট, গিম্বল এবং LiDAR-সংক্রান্ত প্ল্যাটফর্মের মতো সংক্ষিপ্ত গতিশীল নিয়ন্ত্রণ কাজের জন্য খুব উপযুক্ত।
Related Collections

