

MUWEIDU TS5001-10 সার্ভো মোটর ইন্টিগ্রেটেড ইলেকট্রিক ড্রাইভ সিস্টেম ২৪ভি ১:১০ গিয়ারবক্স, RS485/CAN
MUWEIDU TS5001-10 সার্ভো মোটর ইন্টিগ্রেটেড ইলেকট্রিক ড্রাইভ সিস্টেম ২৪ভি ১:১০ গিয়ারবক্স, RS485/CAN
MUWEIDU
নিয়মিত দাম
$278.00 USD
নিয়মিত দাম
বিক্রয় মূল্য
$278.00 USD
একক দাম
per
Taxes included.
শিপিং চেকআউটের সময় গণনা করা হয়।
পিকআপের উপলভ্যতা লোড করা যায়নি
Overview
MUWEIDU TS5001-10 একটি সার্ভো মোটর (একীভূত বৈদ্যুতিক ড্রাইভ সিস্টেম) যা রোবোটিক্স অ্যাকচুয়েটরের জন্য ডিজাইন করা হয়েছে। এটি একটি ব্রাশলেস মোটর, একটি প্ল্যানেটারি রিডিউসার এবং একটি FOC ড্রাইভকে একত্রিত করে এবং RS485/CAN যোগাযোগের মাধ্যমে টর্ক/গতি/অবস্থান নিয়ন্ত্রণ সমর্থন করে।
মূল বৈশিষ্ট্য
- একীভূত বৈদ্যুতিক ড্রাইভ সিস্টেম: ব্রাশলেস মোটর + প্ল্যানেটারি রিডিউসার + FOC ড্রাইভ
- নিয়ন্ত্রণ মোড: টর্ক / গতি / অবস্থান
- যোগাযোগ প্রোটোকল: RS485 / CAN
- এনকোডার: 18বিট + 14বিট
- হ্রাস অনুপাত: 1:10
একীভূত করার প্রশ্নের জন্য (ওয়্যারিং, যোগাযোগ সেটিংস, বা CAD ফাইল), সমর্থনের সাথে যোগাযোগ করুন https://rcdrone.top/ অথবা [email protected].
স্পেসিফিকেশন
| মডেল | TS5001-10 |
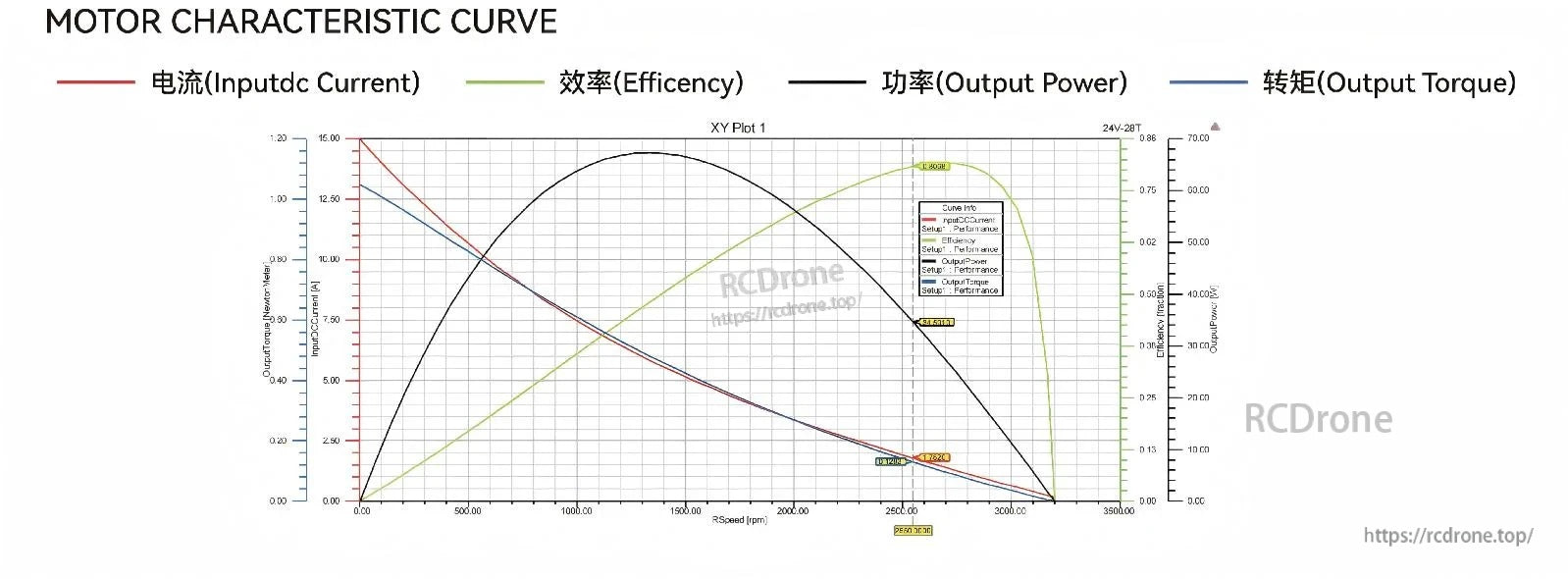
| নির্ধারিত ভোল্টেজ | 24V |
| নির্ধারিত কারেন্ট | 1.6A |
| শীর্ষ শক্তি | 14W |
| নির্ধারিত টর্ক | 1 N.m |
| শীর্ষ টর্ক | 2.5 N.m |
| রেটেড স্পিড | 255 rpm |
| এনকোডার | 18bit + 14bit |
| রোটর ইনর্শিয়া | 140 gcm^2 |
| রিডাকশন রেশিও | 1:10 |
| কন্ট্রোল মোডস | টর্ক/স্পিড/পজিশন |
| কমিউনিকেশন প্রোটোকল | RS485/CAN |
| মোট মাত্রা | Phi53 mm x 36 mm |
| ওজন | 183 g |
অ্যাপ্লিকেশনস
- হিউম্যানয়েড রোবট
- রোবোটিক আর্মস
- এক্সোস্কেলেটনস
- কোয়াড্রুপেড রোবট
- AGV যানবাহন
- ARU রোবট
- লেগড রোবট
- শিল্প রোবট
- পরিদর্শন রোবোটিক যানবাহন
- মেডিকেল রোবট
ডকুমেন্টস
বিস্তারিত

একটি সংক্ষিপ্ত একীভূত ড্রাইভ একটি ব্রাশলেস মোটর, প্ল্যানেটারি গিয়ারবক্স এবং FOC কন্ট্রোলারকে রোবোটিক অ্যাকচুয়েটর নির্মাণের জন্য সংযুক্ত করে।

পা যুক্ত প্ল্যাটফর্ম, রোবট হাত, পরিদর্শন যানবাহন এবং সহায়ক/চিকিৎসা সিস্টেমের জন্য রোবোটিক্সের জন্য ডিজাইন করা হয়েছে।
Related Collections

