






MyActuator RMD-X4-10 প্ল্যানেটারি অ্যাকচুয়েটর ১০N·m ডুয়াল এনকোডার EtherCAT+CAN রোবট জয়েন্ট ড্রাইভ
MyActuator RMD-X4-10 প্ল্যানেটারি অ্যাকচুয়েটর ১০N·m ডুয়াল এনকোডার EtherCAT+CAN রোবট জয়েন্ট ড্রাইভ
MyActuator
পিকআপের উপলভ্যতা লোড করা যায়নি
Overview
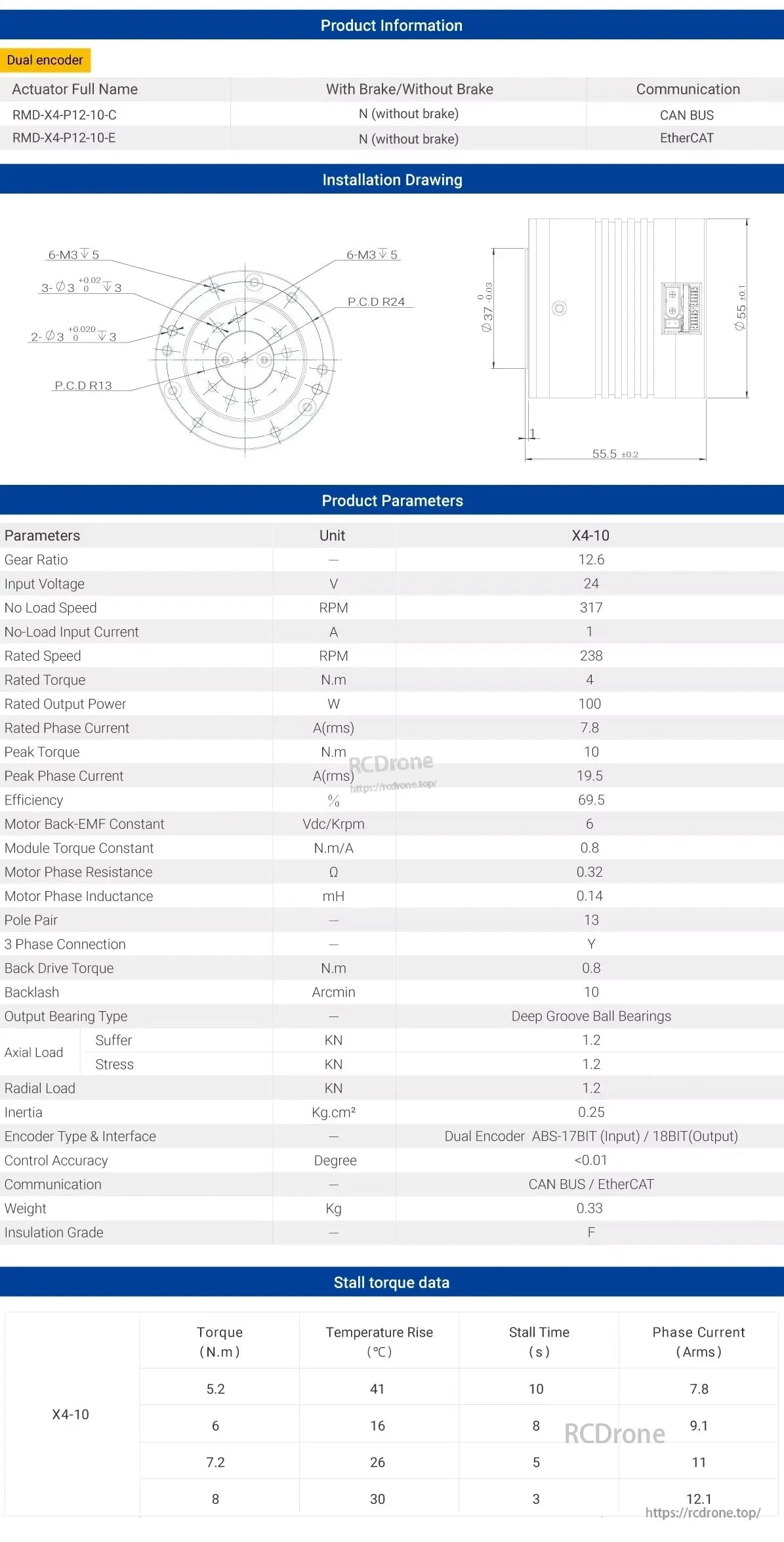
MyActuator RMD-X4-10 প্ল্যানেটারি অ্যাকচুয়েটর একটি উচ্চ-কার্যকারিতা DC মোটর জয়েন্ট মডিউল যা উন্নত রোবোটিক অ্যাপ্লিকেশনগুলির জন্য ডিজাইন করা হয়েছে। এতে 12.6:1 প্ল্যানেটারি গিয়ার অনুপাত, 10N·m পিক টর্ক, এবং 100W রেটেড আউটপুট পাওয়ার অন্তর্ভুক্ত রয়েছে, যা একটি ডুয়াল এনকোডার সিস্টেম (17-বিট ইনপুট / 18-বিট আউটপুট) সংযুক্ত করে যা 0.01° প্রিসিশন কন্ট্রোল প্রদান করে। এর বড় হালকা কাঠামো মাল্টি-সেন্সর ইন্টিগ্রেশন সমর্থন করে, যা মানবাকৃতির রোবটগুলির জন্য সম্পূর্ণ শরীরের অবস্থান নিয়ন্ত্রণের জন্য একটি কেন্দ্রীয় হাব সক্ষম করে। EtherCAT এবং CAN ডুয়াল-প্রোটোকল যোগাযোগ এর মাধ্যমে, অ্যাকচুয়েটর 250μs অতিরিক্ত দ্রুত প্রতিক্রিয়া অর্জন করে, যা মানবাকৃতির রোবট, বায়োনিক পা ড্রাইভ এবং শিল্প অটোমেশনের মতো উচ্চ-গতি, উচ্চ-নির্ভরযোগ্যতার পরিস্থিতির জন্য আদর্শ।
মূল বৈশিষ্ট্য
-
উচ্চ প্রিসিশন ডুয়াল এনকোডার: 17-বিট ইনপুট / 18-বিট আউটপুট সহ 0.01° সঠিকতা
-
পিক টর্ক 10N·m 12.6:1 প্ল্যানেটারি গিয়ার অনুপাত
-
ক্রসড রোলার বেয়ারিং: স্থিতিশীল রোবটিক জয়েন্টের জন্য অসাধারণ অ্যান্টি-বেন্ডিং মোমেন্ট ক্ষমতা
-
ইথারক্যাট + ক্যান বাস ডুয়াল কমিউনিকেশন: মাল্টি-মেশিন লিঙ্কেজ, অতিরিক্ত দ্রুত 250μs প্রতিক্রিয়া সমর্থন করে
-
বড় হালকা কাঠামো: জটিল রোবটিক সিস্টেমের জন্য সেন্সর, কেবল এবং স্লিপ-রিংয়ের সংহতকরণ সক্ষম করে
-
উচ্চ নির্ভরযোগ্যতা: মানবাকৃতির গতি নিয়ন্ত্রণের জন্য ডিজাইন করা, দৌড়ানো, লাফানো এবং জটিল গতির জন্য মসৃণ পরিবর্তন
-
কমপ্যাক্ট ও হালকা: Φ55mm × 55.5mm, ওজন 0.33kg
স্পেসিফিকেশন
| প্যারামিটার | মান |
|---|---|
| মডেল | RMD-X4-10 |
| গিয়ার অনুপাত | 12.6:1 |
| ইনপুট ভোল্টেজ | 24V DC |
| রেটেড স্পিড | 238 RPM |
| নো-লোড স্পিড | 317 RPM |
| রেটেড আউটপুট পাওয়ার | 100W |
| রেটেড টর্ক | 4N·m |
| পিক টর্ক | 10N·m |
| রেটেড কারেন্ট | 7.84A |
| লোড মুক্ত বর্তমান | 1A |
| এনকোডার প্রকার | ডুয়াল এনকোডার (ABS-17bit / 18bit) |
| যোগাযোগ | EtherCAT + CAN বাস |
| ওজন | 0.33কেজি |
| আকার | Ø55মিমি × 55.5mm |
অ্যাপ্লিকেশন
-
মানবাকৃতির রোবট – হাত, পা এবং শরীরের জন্য যৌথ ড্রাইভ
-
বায়োনিক লেগ ড্রাইভ – দৌড়ানো এবং লাফানোর জন্য উচ্চ-টর্ক অ্যান্টি-বেন্ডিং ডিজাইন
-
সহযোগী রোবট – শিল্প অটোমেশনের জন্য মসৃণ গতির নিয়ন্ত্রণ
-
এক্সোস্কেলেটন – মানব-সহায়ক ডিভাইসের জন্য হালকা, উচ্চ-ডায়নামিক অ্যাকচুয়েটর
-
নমনীয় উৎপাদন লাইন – ইথারক্যাট উচ্চ-গতির যোগাযোগের মাধ্যমে মাল্টি-অক্ষ সমন্বয়
প্যাকেজিং ও আনুষাঙ্গিক
-
পাওয়ার সাপ্লাই + CAN বাস যোগাযোগ কেবল ×1
-
120Ω টার্মিনাল রেজিস্ট্যান্স ×1
ইথারক্যাট যোগাযোগ কেবল ×2
-
ক্যান বাস যোগাযোগ মডিউল ×1 (প্রতি অর্ডারে USB-CAN অ্যাডাপ্টার অন্তর্ভুক্ত)
প্যাকেজিং মাত্রা: 100মিমি × 100মিমি × 70মিমি
বিস্তারিত

RMD-X4-PT2.5-10-C ডুয়াল এনকোডার রোবট জয়েন্ট ড্রাইভ 24V ইনপুট, 12.6 গিয়ার অনুপাত, 4N·m টর্ক এবং 100W আউটপুট সহ। এতে CAN BUS/EtherCAT ইন্টারফেস, 317RPM নো-লোড স্পিড এবং 0.28kg ওজন রয়েছে। ইনস্টলেশন মাত্রা এবং প্রযুক্তিগত স্পেসিফিকেশন অন্তর্ভুক্ত রয়েছে।

10N.m পিক টর্ক, 12.6:1 গিয়ার অনুপাত, 0.33kg ওজন সহ প্ল্যানেটারি অ্যাকচুয়েটর। আকার: Ø55mm×55.5mm। এতে EtherCAT/CANBUS যোগাযোগ, ডুয়াল এনকোডার, উচ্চ-গতির MCU, CAN চিপস এবং গভীর খাঁজ বল বিয়ারিং রয়েছে।

ডুয়াল এনকোডার ABS-17BIT ইনপুট / 18BIT আউটপুট, X4-10, SN:40225621, MYACTUATOR

MYACTUATOR-এর RMD-X4-10 প্ল্যানেটারি অ্যাকচুয়েটর 100W শক্তি, 46Nm টর্ক, ডুয়াল এনকোডার, 238rpm স্পিড অফার করে। এটি পাওয়ার + CAN BUS কেবল, 120Ω রেজিস্টর, EtherCAT কেবল, CAN BUS মডিউল এবং বিনামূল্যে USB-CAN অ্যাডাপ্টার সহ আসে।
RMD-X4-10 রোবোটিক প্ল্যানেটারি অ্যাকচুয়েটর একটি ডুয়াল এনকোডার, 12।6 গিয়ার অনুপাত, 24V ইনপুট, 100W আউটপুট, এবং CAN BUS/EtherCAT। এটি 4N.m টর্ক, 238 RPM গতি প্রদান করে, ওজন 0.33kg, এবং উচ্চ দক্ষতার জন্য গভীর খাঁজ বল বিয়ারিং ব্যবহার করে।

X4-10 ইন্টারফেসে পাওয়ার, CAN, এবং EtherCAT পোর্ট অন্তর্ভুক্ত রয়েছে। প্যাকেজিংয়ে পাওয়ার সাপ্লাই, কেবল, রেজিস্টর, এবং মডিউল রয়েছে। মাত্রা: 100x100x70mm। প্রতিটি অর্ডারের সাথে USB-CAN অ্যাডাপ্টার অন্তর্ভুক্ত।

X4-10 অ্যাক্সেসরিজে পাওয়ার সাপ্লাই, CAN BUS এবং EtherCAT কেবল, টার্মিনাল রেজিস্ট্যান্স, এবং একটি CAN BUS মডিউল অন্তর্ভুক্ত রয়েছে। বিস্তারিত সংযোগকারী, তারের কার্যাবলী, সিগন্যাল লাইন, এবং USB-CAN অ্যাডাপ্টার নোটস কভার করে।
Related Collections






