





MyActuator RMD-X4-36 34N·m প্ল্যানেটারি অ্যাকচুয়েটর ডিসি ব্রাশলেস মোটর ডুয়াল এনকোডার, EtherCAT ও CAN বাস, 36:1 গিয়ার অনুপাত সহ
MyActuator RMD-X4-36 34N·m প্ল্যানেটারি অ্যাকচুয়েটর ডিসি ব্রাশলেস মোটর ডুয়াল এনকোডার, EtherCAT ও CAN বাস, 36:1 গিয়ার অনুপাত সহ
MyActuator
পিকআপের উপলভ্যতা লোড করা যায়নি
Overview
MyActuator RMD-X4-36 প্ল্যানেটারি অ্যাকচুয়েটর DC ব্রাশলেস মোটর একটি উচ্চ-কার্যকারিতা যৌথ অ্যাকচুয়েটর যা রোবোটিক্স এবং অটোমেশন সিস্টেমের জন্য ডিজাইন করা হয়েছে যা সঠিক গতির নিয়ন্ত্রণ, উচ্চ টর্ক আউটপুট এবং কমপ্যাক্ট ইন্টিগ্রেশন প্রয়োজন। এর 34N·m পিক টর্ক, 36:1 গিয়ার অনুপাত, এবং ক্রসড রোলার বেয়ারিং স্ট্রাকচার অসাধারণ অ্যান্টি-বেন্ডিং ক্ষমতা এবং স্থায়িত্ব প্রদান করে। EtherCAT + CAN ডুয়াল যোগাযোগ প্রোটোকল এবং 250μs আল্ট্রা-ফাস্ট প্রতিক্রিয়া সহ, এই অ্যাকচুয়েটর মানবাকৃতির রোবট, রোবোটিক আর্ম, মোবাইল প্ল্যাটফর্ম এবং অন্যান্য উন্নত রোবোটিক অ্যাপ্লিকেশনের জন্য আদর্শ। এর ডুয়াল এনকোডার ডিজাইন (ABS 17-বিট ইনপুট / 18-বিট আউটপুট) আল্ট্রা-হাই পজিশনিং নির্ভুলতা নিশ্চিত করে, যখন কমপ্যাক্ট আকার (55mm × 61mm, 0.36kg) হালকা এবং কার্যকরী ইন্টিগ্রেশন সক্ষম করে।
মূল বৈশিষ্ট্যসমূহ
-
উচ্চ নির্ভুলতা ডুয়াল এনকোডার: 17-বিট (ইনপুট) + 18-বিট (আউটপুট) 0.01° সঠিকতার জন্য।
-
EtherCAT + CAN বাস প্রোটোকল: 250μs অতিরিক্ত দ্রুত প্রতিক্রিয়ার জন্য নমনীয় যোগাযোগ।
-
ক্রসড রোলার বেয়ারিং: শ্রেষ্ঠ অ্যান্টি-বেন্ডিং কর্মক্ষমতা এবং দীর্ঘ সেবা জীবন।
-
উচ্চ শক্তি ঘনত্ব: কমপ্যাক্ট 55মিমি ব্যাস, 61মিমি দৈর্ঘ্য, এবং মাত্র 0.36কেজি ওজন।
-
পিক টর্ক 34N·m এবং রেটেড টর্ক 11.5N·m স্থিতিশীল, শক্তিশালী গতির আউটপুট নিশ্চিত করে।
-
উচ্চ দক্ষতা: 100W রেটেড পাওয়ার মসৃণ FOC (ফিল্ড-অরিয়েন্টেড কন্ট্রোল) প্রযুক্তির সাথে।
-
বহুমুখী অ্যাপ্লিকেশন: মানবাকৃতির রোবট, এক্সোস্কেলেটন, ম্যানিপুলেটর এবং অটোমেশন সিস্টেমের জন্য ডিজাইন করা হয়েছে।
স্পেসিফিকেশন
| প্যারামিটার | মান |
|---|---|
| মডেল | RMD-X4-P36-36-C |
| ইনপুট ভোল্টেজ | 24V |
| গিয়ার অনুপাত | 36:1 |
| নো-লোড স্পিড | 111 RPM |
| নো-লোড কারেন্ট | 0.9 A |
| রেটেড স্পিড | 83 RPM |
| রেটেড টর্ক | 11.5 N·m |
| রেটেড আউটপুট পাওয়ার | 100 W |
| পিক টর্ক | 34 N·m |
| পিক ফেজ কারেন্ট | 21.5 A (rms) |
| পোল জোড় | 13 |
| এনকোডার প্রকার | ডুয়াল এনকোডার এবিএস 17-বিট (ইনপুট) / 18-বিট (আউটপুট) |
| যোগাযোগ প্রোটোকল | ইথারক্যাট / ক্যান বাস |
| আকার | Ø55মিমি × 61মিমি |
| ওজন | 0.৩৬ কেজি |
প্যাকেজের সামগ্রী
-
১ × RMD-X4-৩৬ প্ল্যানেটারি অ্যাকচুয়েটর মোটর
-
১ × পাওয়ার সাপ্লাই + CAN বাস যোগাযোগ কেবল
-
১ × 120Ω টার্মিনাল রেজিস্ট্যান্স
-
২ × EtherCAT যোগাযোগ কেবল
-
১ × CAN বাস যোগাযোগ মডিউল (USB-CAN অ্যাডাপ্টার)
অ্যাপ্লিকেশন
-
মানবাকৃতির এবং বায়োনিক রোবট
-
সহযোগী রোবটিক হাত
-
এক্সোস্কেলেটন এবং পুনর্বাসন রোবট
-
সার্ভিস রোবট এবং মোবাইল প্ল্যাটফর্ম
-
কম্প্যাক্ট, উচ্চ-টর্ক অ্যাকচুয়েটর প্রয়োজন এমন সঠিক অটোমেশন সিস্টেম
বিস্তারিত

প্ল্যানেটারি অ্যাকচুয়েটর 34N.m পিক টর্ক, 36:1 গিয়ার অনুপাত, 0।36কেজি ওজন, Ø55মিমি×61মিমি আকার। বৈশিষ্ট্যগুলি হল EtherCAT/CANBUS যোগাযোগ, ডুয়াল এনকোডার, উচ্চ-গতির MCU, CAN চিপস, এবং ক্রসড রোলার বিয়ারিং।

RMD-X4-P36-36 মোটর: 24V, 10.5N.m টর্ক, 83RPM, ডুয়াল এনকোডার, EtherCAT+CAN BUS, 36 গিয়ার অনুপাত, 0.36কেজি, ABS-17BIT/18BIT এনকোডার, বিস্তারিত মাত্রা অন্তর্ভুক্ত।

X4-36 মোটর, 100W, 12N.m, ডুয়াল এনকোডার, 17BIT ইনপুট, 18BIT আউটপুট, 63rpm, 1:36 গিয়ার অনুপাত, CAN বাস ইন্টারফেস, LED সূচক।

MYACTUATOR X4-36 মোটর, 100W, 12N.m, ডুয়াল এনকোডার, 83rpm, 1:36 অনুপাত। পাওয়ার সাপ্লাই, CAN BUS কেবল, 120Ω রেজিস্টর, EtherCAT কেবল, এবং CAN BUS মডিউল সহ বিনামূল্যে USB-CAN অ্যাডাপ্টার অন্তর্ভুক্ত।
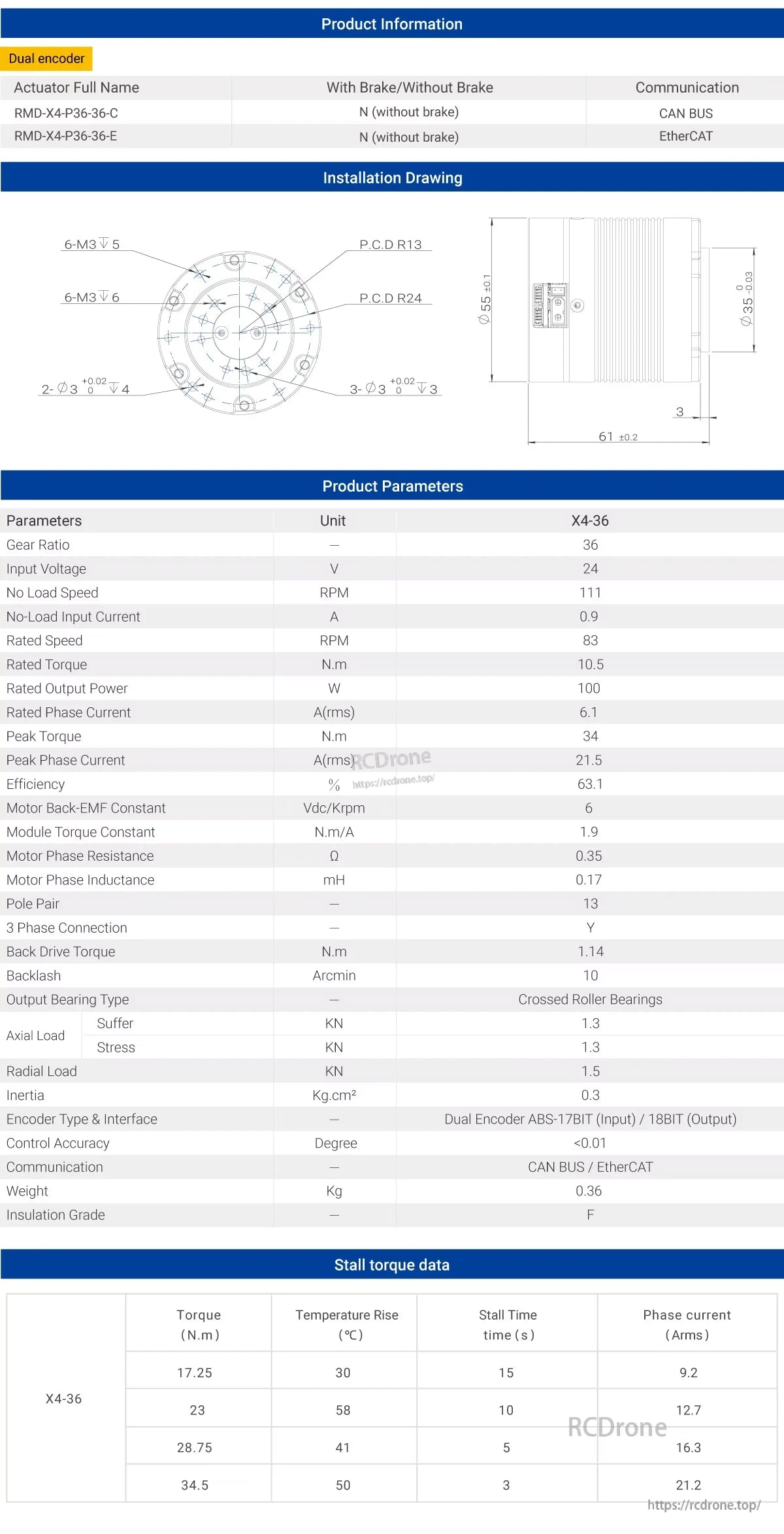
RMD-X4-P36-36 মোটরের ডুয়াল এনকোডার, 36 গিয়ার অনুপাত, 24V ইনপুট, 100W আউটপুট, CAN BUS/EtherCAT রয়েছে। রেটেড টর্ক: 10.5 N.m, গতি: 83 RPM, ওজন: 0.36 কেজি। স্টল টর্ক ডেটাতে টর্ক, তাপমাত্রা বৃদ্ধি, সময়, এবং ফেজ কারেন্ট মান অন্তর্ভুক্ত।

ইন্টারফেসের বিস্তারিত তথ্যের মধ্যে পাওয়ার, CAN, এবং EtherCAT পোর্ট অন্তর্ভুক্ত রয়েছে। প্যাকেজিংয়ে মোটর, তার, প্রতিরোধক, যোগাযোগ মডিউল রয়েছে। মাত্রা: 100x100x70mm। USB-CAN অ্যাডাপ্টার অন্তর্ভুক্ত।
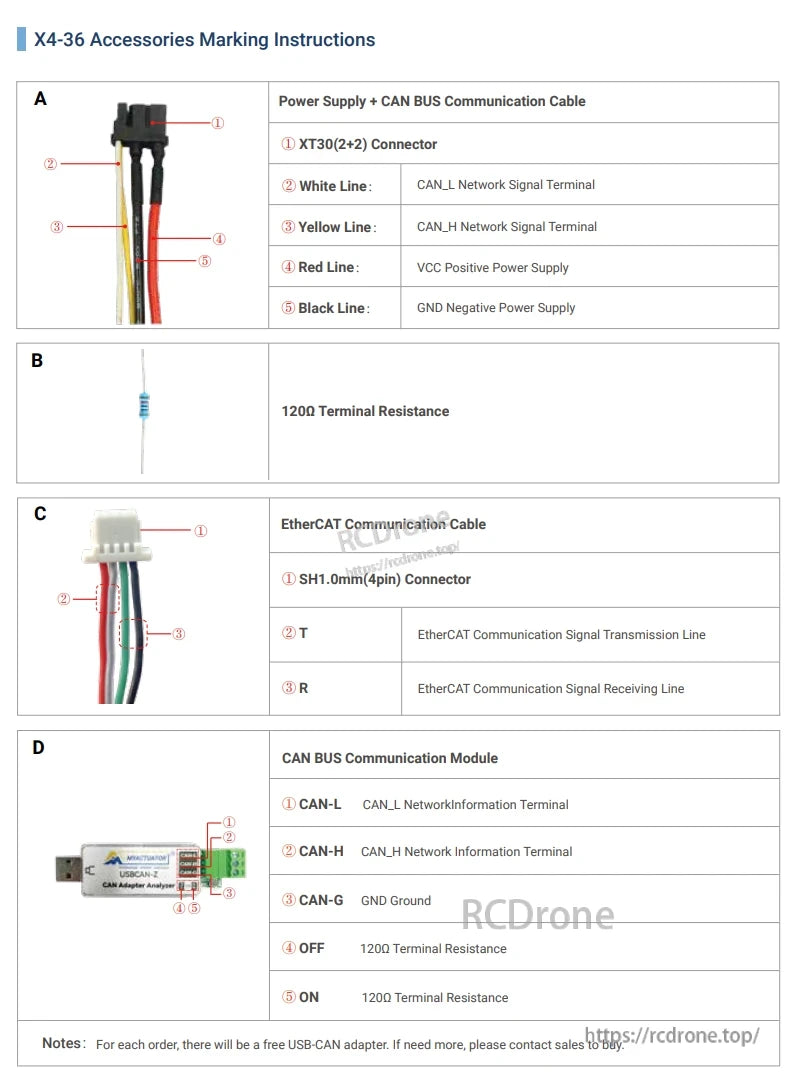
X4-36 আনুষাঙ্গিকগুলির মধ্যে পাওয়ার সাপ্লাই, CAN BUS, EtherCAT কেবল, 120Ω প্রতিরোধক, এবং CAN মডিউল অন্তর্ভুক্ত রয়েছে। বিস্তারিত তথ্যের মধ্যে সংযোগকারী, তারের রঙ, সংকেত লাইন, এবং যোগাযোগ ও পাওয়ার সংযোগের জন্য টার্মিনাল সেটিংস অন্তর্ভুক্ত রয়েছে। প্রতিটি অর্ডারের সাথে USB-CAN অ্যাডাপ্টার অন্তর্ভুক্ত।
Related Collections





