




ROBOTERA XHAND 1 রোবট হাত - ১২ ডিওএফ, ২৭০° স্পর্শকাতর আঙুল, ৮০এন গ্রিপ, ২৫ কেজি উত্তোলন, EtherCAT/RS485, ROS-প্রস্তুত
ROBOTERA XHAND 1 রোবট হাত - ১২ ডিওএফ, ২৭০° স্পর্শকাতর আঙুল, ৮০এন গ্রিপ, ২৫ কেজি উত্তোলন, EtherCAT/RS485, ROS-প্রস্তুত
ROBOTERA
পিকআপের উপলভ্যতা লোড করা যায়নি
Overview
ROBOTERA XHAND 1 একটি পাঁচ-আঙুলের রোবট হাত যা সম্পূর্ণ সরাসরি-ড্রাইভ জয়েন্ট মডিউল এবং 12 সক্রিয় DoF নিয়ে গঠিত। হাতটি মানব হাতের আকারের (191 মিমি x 94 মিমি x 47 মিমি) এবং উচ্চ-রেজোলিউশন ট্যাকটাইল সেন্সিং, শক্তিশালী গ্রিপ শক্তি এবং রোবটিক্স গবেষণা ও সংহতির জন্য ডেভেলপার-বান্ধব ইন্টারফেস সহ দক্ষ ম্যানিপুলেশনের জন্য ডিজাইন করা হয়েছে।
মূল বৈশিষ্ট্য
- সম্পূর্ণ সরাসরি-ড্রাইভ আর্কিটেকচার যা একত্রিত গিয়ার-চালিত, শক্তি-নিয়ন্ত্রিত জয়েন্ট মডিউল (আঙুলে 3; অন্যান্য চারটি আঙুলে 9)।
- 12 সম্পূর্ণ সক্রিয় DoF; সূচক আঙুলের পার্শ্বীয় দোল +/-15° জটিল হাতে ম্যানিপুলেশনের জন্য।
- উচ্চ গ্রিপ কর্মক্ষমতা: আঙুলের টিপের শক্তি 15N; সর্বাধিক গ্রিপ শক্তি 80N; সর্বাধিক গ্রাসের ওজন 25 কেজি (পাম উপরে) এবং 16 কেজি (পাম বামে)।
- উচ্চ-গতির অ্যাকচুয়েশন সমর্থন >2Hz খোলা/বন্ধ পুনরাবৃত্তি; 10 CPS (প্রতি সেকেন্ডে ক্লিক) পর্যন্ত আঙুলের ক্লিকিং প্রদর্শিত হয়েছে।
- ২৭০° ফিঙ্গারটিপ ট্যাকটাইল কভারেজ পাঁচটি ত্রি-মাত্রিক ট্যাকটাইল অ্যারে সেন্সর সহ; পুরো হাতের রেজোলিউশন ১২x১০ প্রতি ফিঙ্গারটিপ x ৫।
- ত্রি-মাত্রিক শক্তি সেন্সিং সহ ট্যাঞ্জেন্টিয়াল শক্তি (X এবং Y); ফিঙ্গারটিপ পুনরাবৃত্তি অবস্থান নির্ভুলতা +/-০.২০ মিমি।
- ব্যাক-ড্রাইভেবল ড্যাম্পিং <= ০.১ Nm; বর্তমান-লুপ শক্তি নিয়ন্ত্রণ এবং শক্তি-অবস্থান নিয়ন্ত্রণের জন্য সম্মতিশীল ইন্টারঅ্যাকশন।
- ডেভেলপার-বান্ধব সংযোগ: EtherCAT এবং RS485 (USB); ROS1/ROS2, Ubuntu (Linux), x86 এবং ARM আর্কিটেকচার, TwinCAT, এবং সাধারণ রোবোটিক আর্মের সাথে সামঞ্জস্যপূর্ণ (যার মধ্যে xARM, Realman, UR অন্তর্ভুক্ত)।
- ১,০০০,০০০ নো-লোড গ্রাস্প সাইকেলের জন্য টেকসইতা রেট করা হয়েছে; অপারেটিং তাপমাত্রা -২০°C ~ ৬০°C।
প্রশ্ন, ইন্টিগ্রেশন সমর্থন, বা বাল্ক ক্রয়ের জন্য যোগাযোগ করুন [email protected] or পরিদর্শন করুন https://rcdrone.top/।
স্পেসিফিকেশন
| প্যারামিটার | মান |
|---|---|
| ওজন | 1100 গ্রাম |
| আকার (L x W x T) | 191 মিমি x 94 মিমি x 47 মিমি (একটি প্রাপ্তবয়স্কের হাতের আকার) |
| সক্রিয় DoF (মোট) | 12 |
| প্যাসিভ DOF (মোট) | 0 |
| DoF বরাদ্দ | থাম্ব x 3; সূচক আঙ্গুল x 3; মধ্যম আঙ্গুল x 2; রিং আঙ্গুল x 2; ছোট আঙ্গুল x 2 |
| থাম্ব অ্যাকচুয়েশন/ট্রান্সমিশন | 3 গিয়ার-চালিত ফোর্স-নিয়ন্ত্রিত জয়েন্ট মডিউল |
| চার-আঙ্গুল অ্যাকচুয়েশন/ট্রান্সমিশন | 9 গিয়ার-চালিত ফোর্স-নিয়ন্ত্রিত জয়েন্ট মডিউল |
| আঙ্গুলের টিপ কনফিগারেশন | গোলাকার বা গোলাকার আঙ্গুলের টিপ |
| পাশের দোল | -15°~+15° (সূচক) |
| ফিঙ্গারটিপ রিপিট পজিশনিং অ্যাকিউরেসি | +/− 0.20 মিমি |
| নিয়ন্ত্রণ মোড | পজিশন নিয়ন্ত্রণ (কম ড্যাম্পিং/উচ্চ ড্যাম্পিং), কারেন্ট-লুপ ফোর্স নিয়ন্ত্রণ, ফোর্স-পজিশন নিয়ন্ত্রণ |
| আঙুলের চাপ | 15N |
| সর্বাধিক গ্রিপ শক্তি (সম্পূর্ণ হাত) | 80N |
| সর্বাধিক গ্রাস ওজন (হাতের তালু বাম) | 16 কেজি |
| সর্বাধিক গ্রাস ওজন (হাতের তালু উপরে) | 25 কেজি |
| আঙুলের সবচেয়ে দূরের প্রতিক্রিয়া | ছোট পিঙ্কি |
| খোলা/বন্ধ পুনরাবৃত্তি গতি | >2Hz |
| ব্যাক-ড্রাইভ ড্যাম্পিং (ব্যাকড্রাইভেবল) | <= 0.1 Nm |
| স্পর্শকাতর কভারেজ | 270° পাঁচ-আঙুলের আঙুলের টিপের চারপাশে |
| স্পর্শকাতর সেন্সরের সংখ্যা | পাঁচটি আঙুলের টিপে 270° তিন-মাত্রিক চারপাশে স্পর্শকাতর অ্যারে সেন্সর |
| স্পর্শকাতর রেজোলিউশন (সম্পূর্ণ হাত) | 12x10 (270° চারপাশে প্রতি আঙুলের টিপ) x 5 |
| স্পর্শকাতর সেন্সিং মাত্রা | তিন-মাত্রিক বল সেন্সিং (তলদেশীয় বল X এবং Y সহ) |
| সম্পূর্ণ হাতের নিয়ন্ত্রণ ফ্রিকোয়েন্সি | 83Hz |
| যোগাযোগের হার | EtherCAT: 100MHz; RS485: 3MHz |
| সেন্সিং প্যারামিটার | আঙুলের টিপ: 120 তিন-মাত্রিক প্রোফাইলিং অ্যারে বল; জয়েন্ট: অবস্থান, গতি, তাপমাত্রা, বর্তমান (টর্ক) |
| নিয়ন্ত্রণ প্যারামিটার | জয়েন্ট পজিশন; জয়েন্ট টর্ক; জয়েন্ট স্টিফনেস কোঅফিশিয়েন্ট; জয়েন্ট ড্যাম্পিং কোঅফিশিয়েন্ট |
| নো-লোড গ্রাস্প সাইকেল | ১,০০০,০০০ সাইকেল |
| অপারেটিং তাপমাত্রার পরিসর | -২০°C ~ ৬০°C |
| কাজের ভোল্টেজ | ২৪V ~ ৭২V |
| স্ট্যাটিক কারেন্ট | ০.১৫এ @৪৮ভি, ৭ওয়াট |
| সর্বাধিক কারেন্ট | ২.৫এ @৪৮ভি, ১২০ওয়াট |
| যোগাযোগ ইন্টারফেস | আরএস৪৮৫ (ইউএসবি), ইথারক্যাট |
অ্যাপ্লিকেশনসমূহ
- টেলিওপারেশন: এমআর এবং গ্লাভ টেলিওপারেশন সমর্থন করে; ভিশন প্রো টেলিওপারেশন; ম্যানাস গ্লাভস; পিকো/মেটা কুয়েস্ট।
- রোবটিক আর্ম এবং মানবীয় ইন্টিগ্রেশন: xARM, Realman, UR এবং অন্যান্য রোবটিক আর্মের সাথে সামঞ্জস্যপূর্ণ।
- গবেষণা এবং সিমুলেশন: সঠিক URDF, ট্যাকটাইল সেন্সিং সিমুলেশন; আইজ্যাক জিম এবং মুজোকোর সাথে শক্তিশালী শেখার জন্য উপযুক্ত।
- মানব-যন্ত্র ইন্টারঅ্যাকশন এবং মানব সরঞ্জামগুলির অপারেশন সহ সম্মতিশীল শক্তি নিয়ন্ত্রণ।
ম্যানুয়াল
Xhand_adapter.stp
MH2.25_right_stp.zip
MH2.25_left_stp.zip
XHand_Control_ROS_Documentation.pdf
X-Hand_1_Product_Manual_1.0.pdf
X-Hand_1_User_Quick_Start_Instructions_1.0.pdf
বিস্তারিত

ROBOTERA XHAND1 রোবোটিক হাত সম্পূর্ণ ডাইরেক্ট ড্রাইভ সহ, সত্যিকারের স্বাধীনতা এবং উন্নত দক্ষতা প্রদান করে।

XHAND1 দ্বারা ROBOTERA: মানবাকৃতির পাঁচ আঙুলের হাত 12 ডিগ্রি স্বাধীনতা সহ, প্রতি আঙুলের টিপে 270° স্পর্শকাতর সেন্সর, 80N গ্রিপ ফোর্স, 25kg লোড ক্ষমতা। জটিল কাজ এবং টুল পরিচালনার জন্য ডিজাইন করা হয়েছে।

XHAND 1: প্রতিটি জয়েন্টের জন্য ডাইরেক্ট-ড্রাইভ মডিউল সহ প্রথম দক্ষ হাত। এতে উচ্চ-শক্তির কর্ডলেস মোটর, নিম্ন-ড্যাম্পিং রিডিউসার, সঠিক এনকোডার এবং উন্নত রোবোটিক ম্যানিপুলেশনের জন্য স্ব-উন্নত একীভূত জয়েন্ট মডিউল রয়েছে।
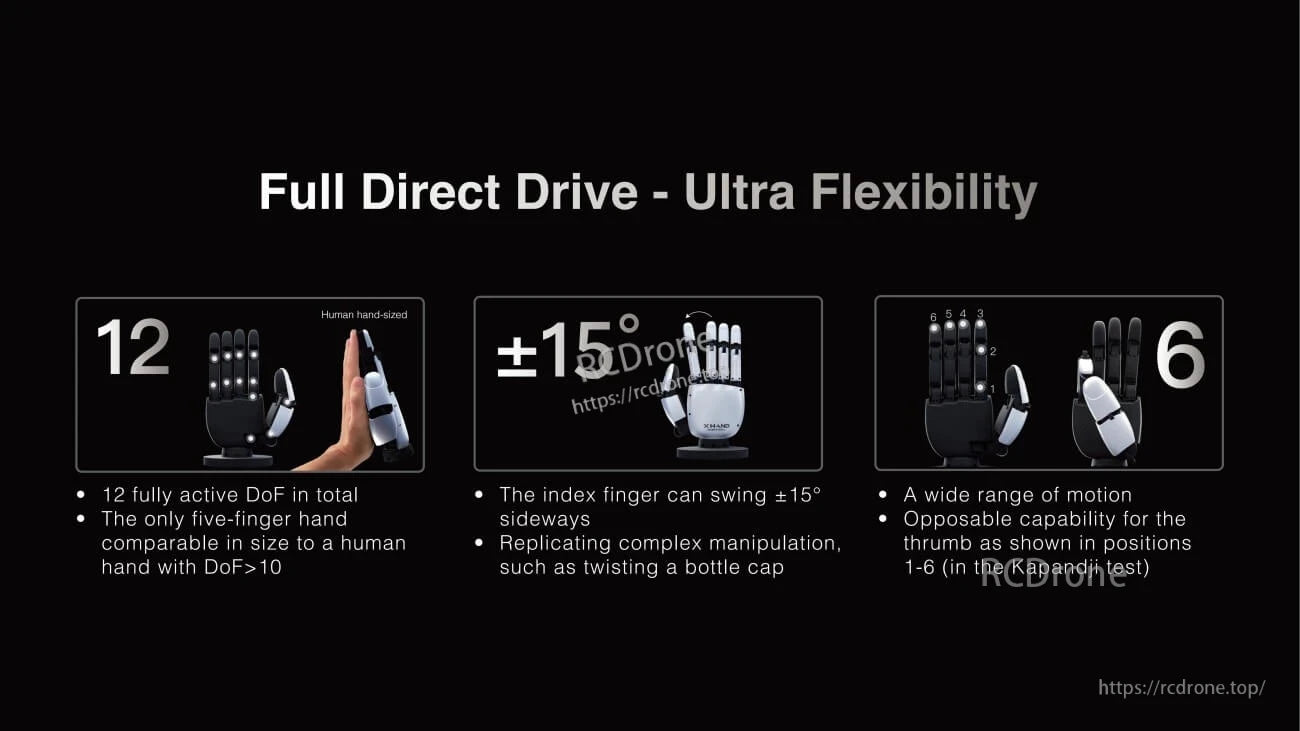
ROBOTERA XHAND 1 একটি অতিরিক্ত নমনীয়, মানব আকারের রোবোটিক হাত যার 12টি সক্রিয় ডিগ্রি অফ ফ্রিডম (DoF) রয়েছে। এর সূচী আঙুল ±15° পাশের দিকে নড়ে জটিল কাজের জন্য, এবং থাম্ব ছয়টি বিপরীত অবস্থান প্রদান করে বহুমুখী পরিচালনার জন্য।

ROBOTERA XHAND 1: ২৫ কেজি লোড, ৮০N গ্রিপ শক্তি, সম্পূর্ণ ডাইরেক্ট ড্রাইভ, সমজাতীয় লিঙ্কেজ/টেনডন-চালিত সমাধানগুলিকে অতিক্রম করে।

সম্পূর্ণ ডাইরেক্ট ড্রাইভ রোবট হাত গিয়ার-চালিত গতির সাথে ১০ CPS অর্জন করে, ১ Nm এর বেশি টর্ক, লিঙ্কেজ এবং টেনডন সিস্টেমগুলিকে অতিক্রম করে উন্নত গেমিং পারফরম্যান্সের জন্য।

ROBOTERA XHAND 1 এর ২৭০° ফিঙ্গারটিপ সেন্সর রয়েছে >১০০ পয়েন্ট এবং ০.০৫ N সঠিকতা সহ 3D শক্তি, স্পর্শ, এবং তাপমাত্রা সেন্সিংয়ের জন্য, উন্নত গ্রিপ পারফরম্যান্স নিশ্চিত করে।
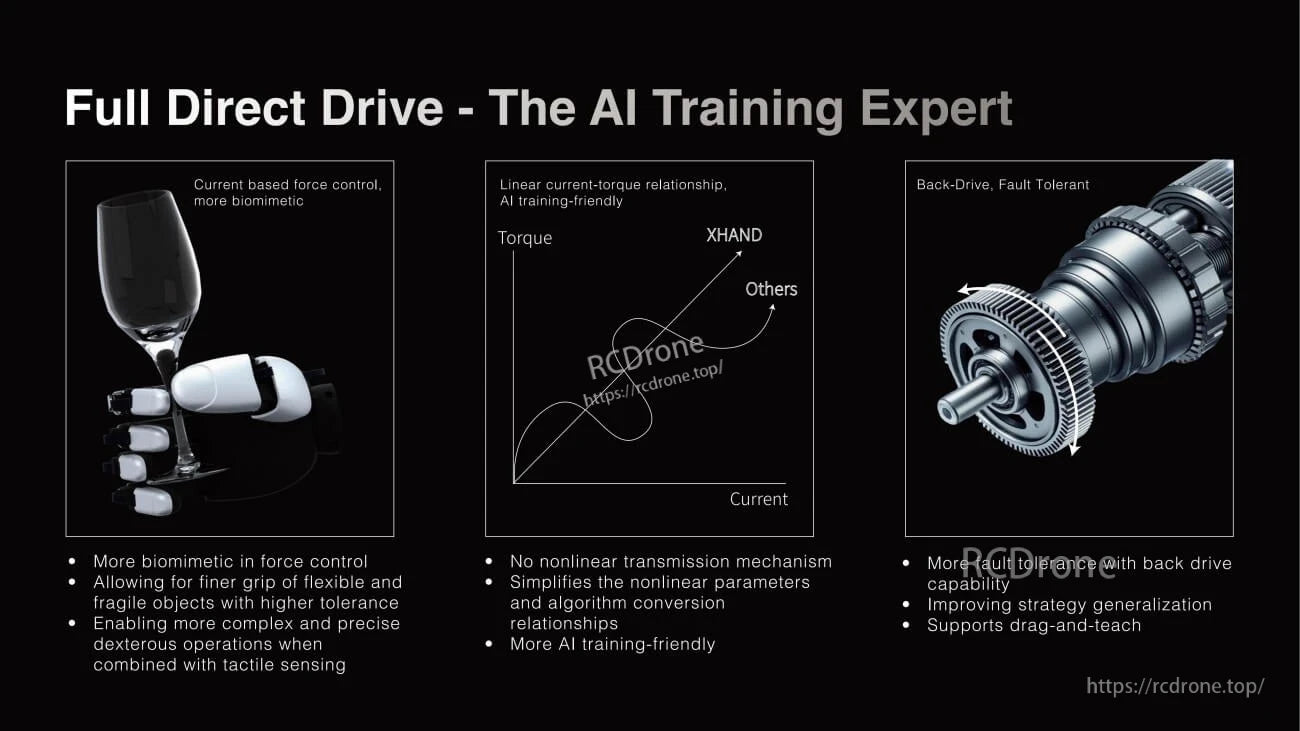
ROBOTERA XHAND 1 জীববৈচিত্র্য অনুকরণকারী শক্তি নিয়ন্ত্রণ, AI প্রশিক্ষণের জন্য লিনিয়ার টর্ক-কারেন্ট প্রতিক্রিয়া, এবং ব্যাক-ড্রাইভ ত্রুটি সহনশীলতা প্রদান করে—নির্দিষ্ট পরিচালনা, সহজ অ্যালগরিদম, ড্র্যাগ-এন্ড-টিচ সমর্থন, এবং উন্নত কৌশল সাধারণীকরণের সক্ষমতা।
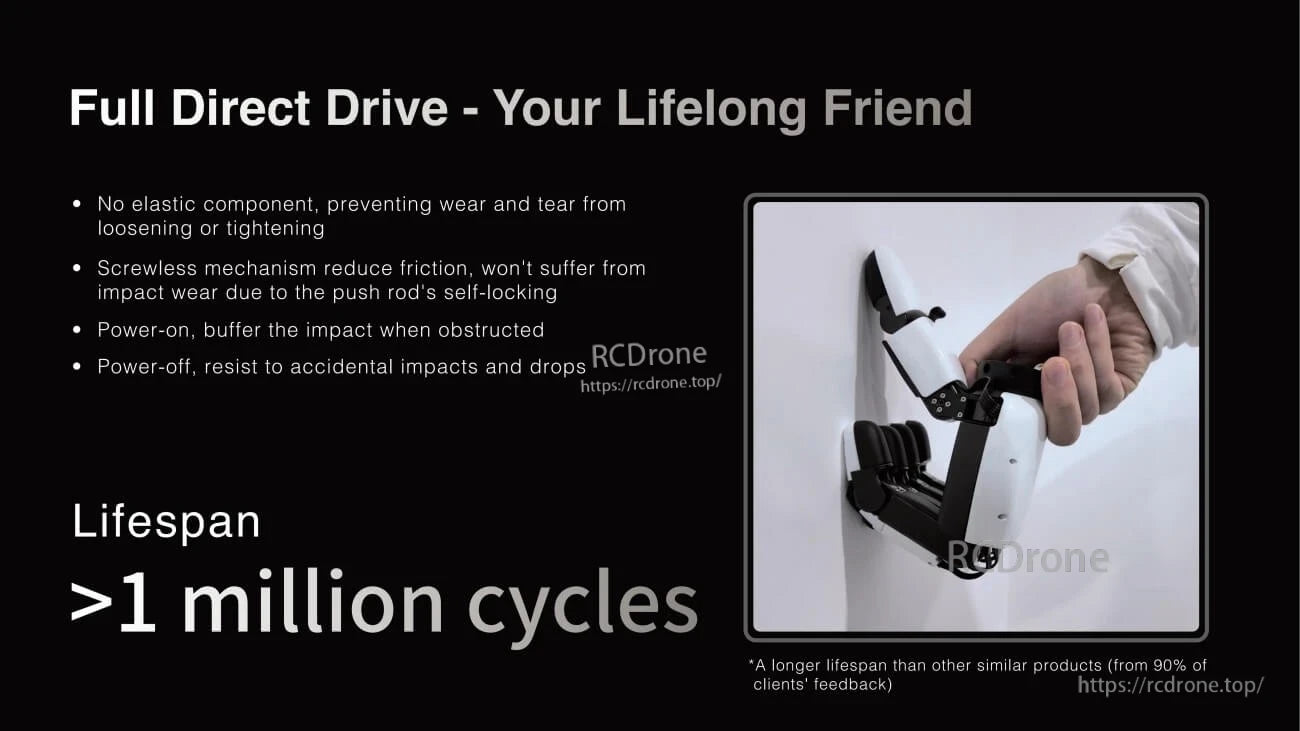
পূর্ণ ডাইরেক্ট ড্রাইভ রোবট হাত স্থায়িত্ব প্রদান করে কোন ইলাস্টিক অংশ বা স্ক্রু ছাড়াই, চালু থাকাকালীন প্রভাব শোষণ, বন্ধ থাকাকালীন পড়ার প্রতিরোধ, এবং এক মিলিয়নেরও বেশি চক্রের জীবনকাল—গ্রাহকের প্রতিক্রিয়া অনুযায়ী অনুরূপ পণ্যগুলিকে অতিক্রম করে।

ROBOTERA XHAND 1 এমআর এবং গ্লাভ টেলিওপারেশন সমর্থন করে, ROS1/ROS2 এবং x64/ARM-এ উবুন্টুর সাথে সামঞ্জস্যপূর্ণ। xARM, Realman, UR রোবটিক হাতের সাথে সংহত করার জন্য EtherCAT/TwinCAT/RS485 বৈশিষ্ট্য রয়েছে। সঠিক URDF মডেলিং এবং স্পর্শকাতর সেন্সিং সিমুলেশন অফার করে। ক্রস-প্ল্যাটফর্ম নমনীয়তা এবং উন্নত নিয়ন্ত্রণ প্রোটোকল সহ ডেভেলপার-বান্ধব রোবটিক্স অ্যাপ্লিকেশনগুলির জন্য ডিজাইন করা হয়েছে।
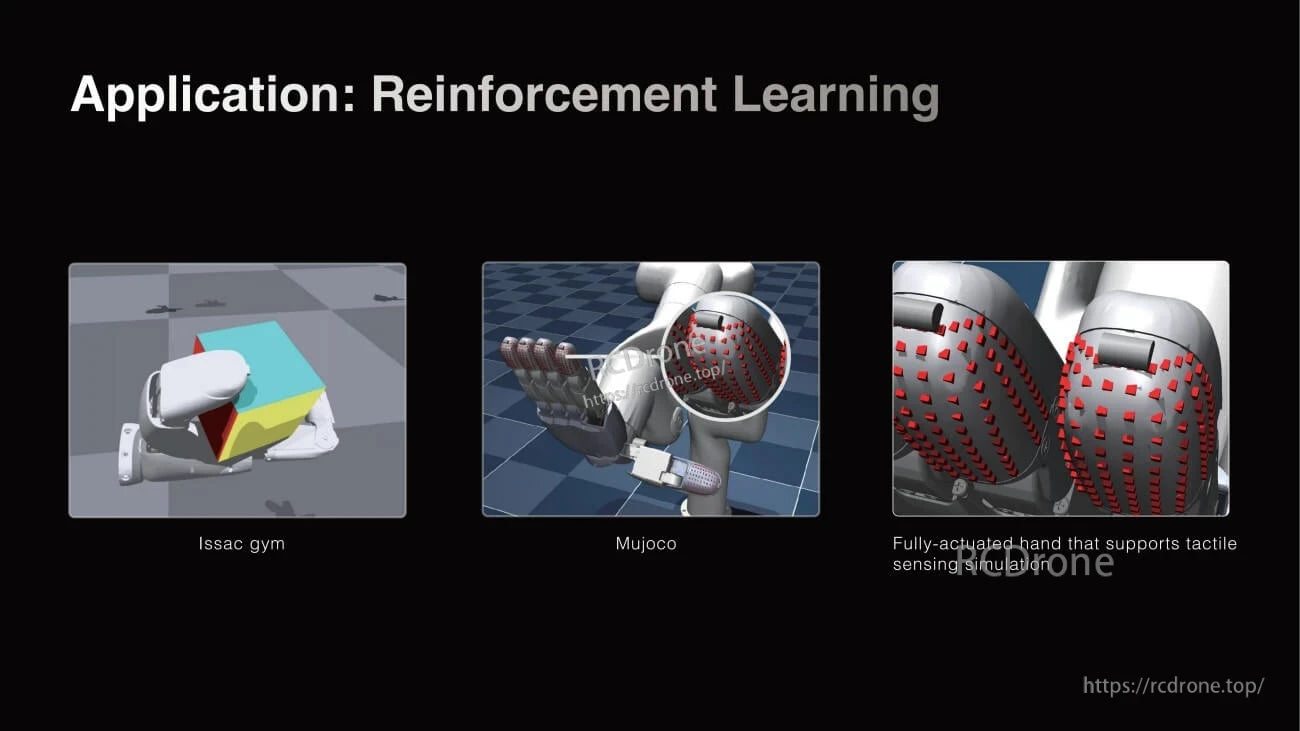
পুনর্বলন শেখার অ্যাপ্লিকেশন: Issac gym, Mujoco, এবং উন্নত রোবট নিয়ন্ত্রণ এবং প্রশিক্ষণ পরিবেশের জন্য স্পর্শকাতর সেন্সিং সিমুলেশন সহ সম্পূর্ণ-অ্যাকচুয়েটেড হাত।
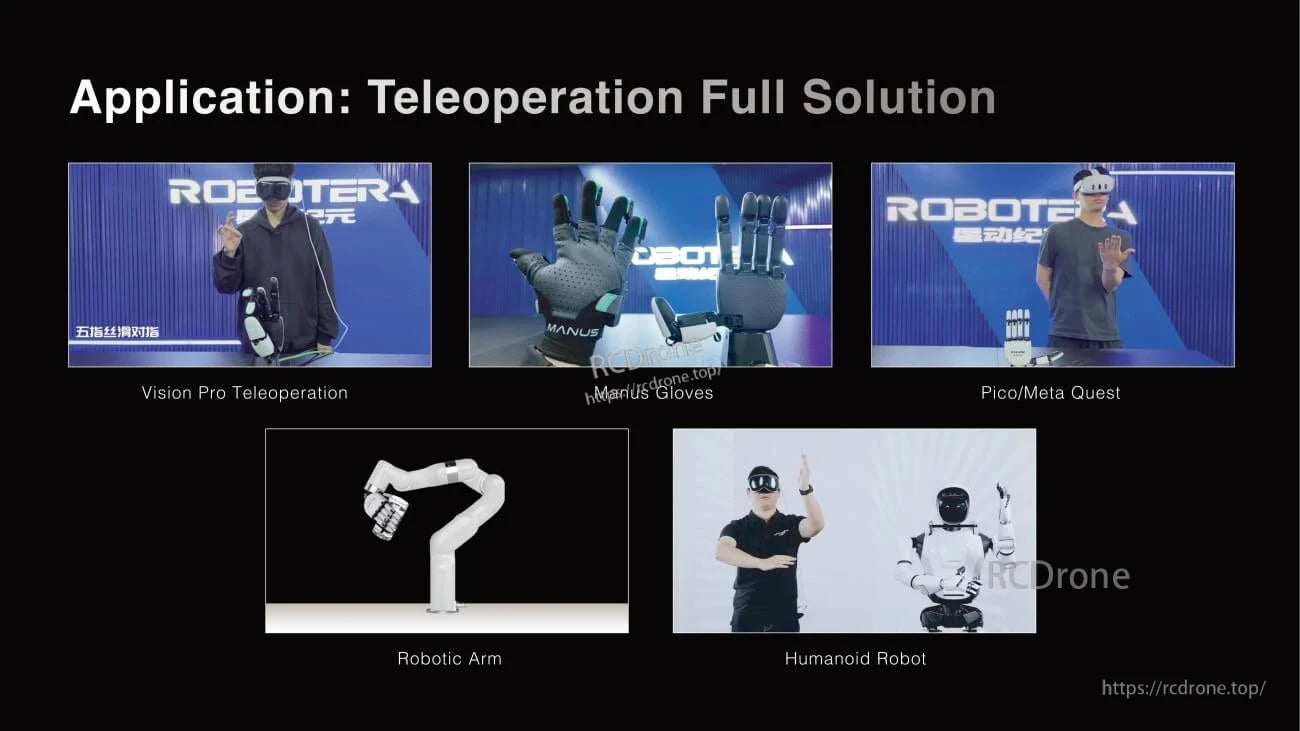
ভিশন প্রো, ম্যানাস গ্লাভস, পিকো/মেটা কুয়েস্ট, রোবটিক আর্ম এবং মানবাকৃতির রোবট সহ টেলিওপারেশন সম্পূর্ণ সমাধান, উন্নত দূরবর্তী নিয়ন্ত্রণের জন্য।
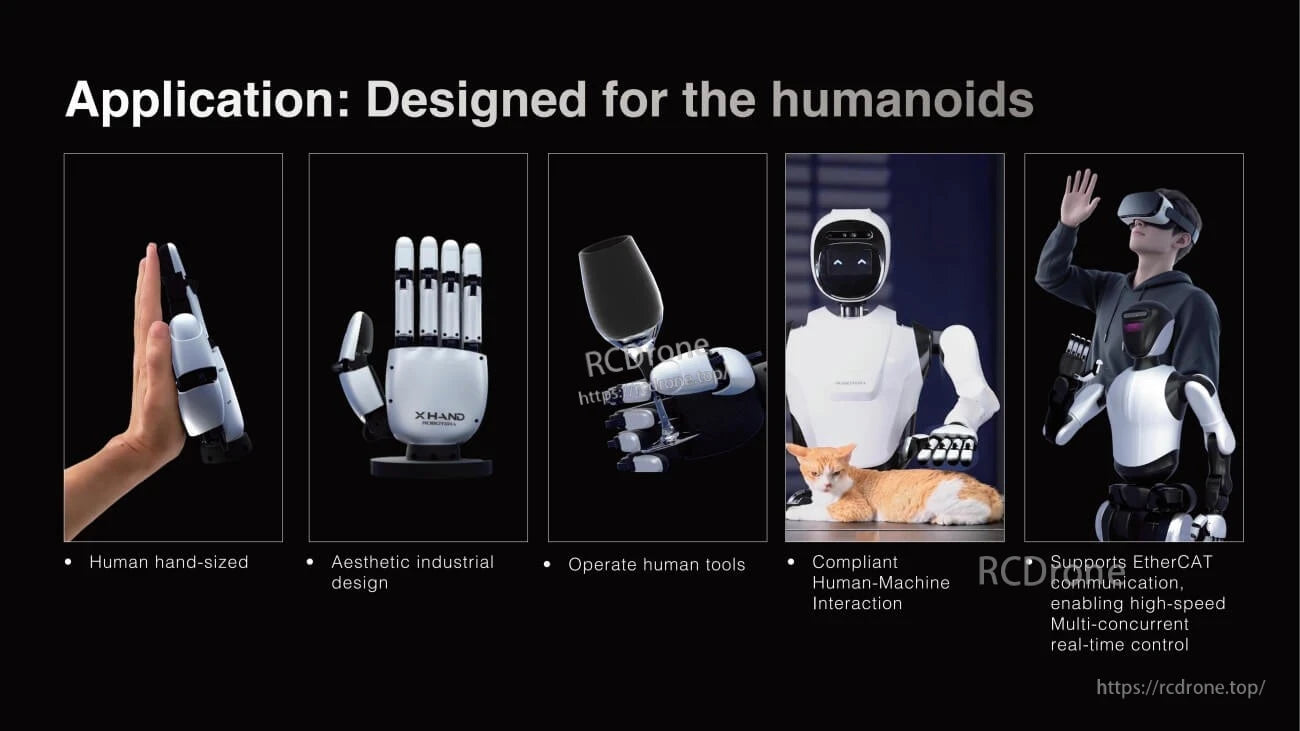
মানব আকারের রোবট হাত, নান্দনিক ডিজাইন সহ, সরঞ্জাম পরিচালনা করে, সম্মতিপূর্ণ ইন্টারঅ্যাকশন সক্ষম করে, রিয়েল-টাইম নিয়ন্ত্রণের জন্য ইথারক্যাট সমর্থন করে।
Related Collections




