



S2-F290 প্রোগ্রামেবল ড্রোন - Pixwawk ওপেন সোর্স ROS SLAM AI সেকেন্ডারি ডেভেলপমেন্ট ইন্ডাস্ট্রিয়াল লেভেল ড্রোন চ্যালেঞ্জের জন্য
S2-F290 প্রোগ্রামেবল ড্রোন - Pixwawk ওপেন সোর্স ROS SLAM AI সেকেন্ডারি ডেভেলপমেন্ট ইন্ডাস্ট্রিয়াল লেভেল ড্রোন চ্যালেঞ্জের জন্য
RCDrone
পিকআপের উপলভ্যতা লোড করা যায়নি
ওভারভিউ
দ S2-F290 প্রোগ্রামেবল ড্রোন একটি উচ্চ কর্মক্ষমতা হয় শিল্প-গ্রেড ড্রোন গৌণ উন্নয়ন এবং ড্রোন চ্যালেঞ্জের জন্য ডিজাইন করা হয়েছে। বৈশিষ্ট্যযুক্ত a 2400g এর পেলোড ক্ষমতা, ক 6S 6000mAh ব্যাটারি, এবং ক সর্বোচ্চ নিয়ন্ত্রণ দূরত্ব 10KM, এটা দিয়ে নির্ভুলতা প্রদান করে ≈1–2m এর GPS অবস্থান নির্ভুলতা এবং লেভেল 3-4 এর বায়ু প্রতিরোধের. দ্বারা চালিত Pixhawk 2.4.8 ফ্লাইট কন্ট্রোলার সঙ্গে ওপেন সোর্স ROS SLAM প্রযুক্তি, ড্রোন যেমন উন্নত ফাংশন সমর্থন করে 3D LiDAR ম্যাপিং, YOLO-ভিত্তিক বস্তুর স্বীকৃতি, এবং গঠন উড়ন্ত. এর 3 মিমি কার্বন ফাইবার ফ্রেম চরম পরিস্থিতিতে পরীক্ষিত ব্যতিক্রমী স্থায়িত্ব এবং স্থায়িত্ব নিশ্চিত করে। প্ল্যাটফর্মটি অত্যন্ত কাস্টমাইজযোগ্য, এটি চাইনিজ/ইংরেজি QGC গ্রাউন্ড স্টেশন সমর্থন, মডুলার প্রসারণযোগ্যতা এবং ব্যাপক টিউটোরিয়ালের মতো বৈশিষ্ট্যগুলি অফার করে, যা এটিকে গবেষণা, প্রতিযোগিতা এবং উন্নয়ন অ্যাপ্লিকেশনের জন্য আদর্শ করে তোলে।
স্পেসিফিকেশন
বিমান
| প্যারামিটার | স্পেসিফিকেশন |
|---|---|
| নাম | S2-F290 প্রোগ্রামেবল ড্রোন |
| পেলোড ওজন | 2400 গ্রাম |
| মডেল | S2-F290 |
| জিপিএস অবস্থান নির্ভুলতা | ≈1–2মি |
| হুইলবেস | 290 মিমি |
| সর্বোচ্চ টেকঅফ ওজন | 3190 গ্রাম |
| ব্যাটারি | 6S স্ট্যান্ডার্ড 6000mAh ব্যাটারি |
| নিয়ন্ত্রণ দূরত্ব | 10KM (1000m মধ্যে প্রস্তাবিত) |
| বায়ু প্রতিরোধের | লেভেল 3-4 |
| অপারেটিং এনভায়রনমেন্ট | ইনডোর/আউটডোর |
| সহনশীলতা পরীক্ষার ফলাফল | বিস্তারিত |
|---|---|
| প্রোপেলার | 7-ইঞ্চি |
| ব্যাটারির ক্ষমতা | 6S 6000mAh (5300mAh ব্যবহৃত) |
| পরিবেশ | বায়ুহীন |
| ফ্লাইট সময় | 11 মিনিট 30 সেকেন্ড |
ফ্লাইট কন্ট্রোলার
| কম্পোনেন্ট | স্পেসিফিকেশন |
|---|---|
| FMU প্রসেসর | STM32H743 Cortex-M7, 480MHz, 2MB Flash, 1MB SRAM |
| IO প্রসেসর | STM32F103 Cortex-M3, 72MHz, 64KB SRAM |
| সেন্সর | অ্যাক্সিলোমিটার/জাইরোস্কোপ: ICM-42688-P |
| অ্যাক্সিলোমিটার/জাইরোস্কোপ: BMI055 | |
| ম্যাগনেটোমিটার: IST8310 | |
| ব্যারোমিটার: MS5611 | |
| রেটেড ভোল্টেজ | সর্বোচ্চ ইনপুট ভোল্টেজ: 6V |
| USB পাওয়ার ইনপুট: 4.75-5.25V | |
| সার্ভো ইনপুট: 0-36V | |
| রেট করা বর্তমান | টেলিমেট্রি 1 সর্বোচ্চ আউটপুট বর্তমান: 1A |
| অন্যান্য বন্দরের জন্য সম্মিলিত কারেন্ট: 1A | |
| যান্ত্রিক ডেটা | মাত্রা: 53.3 × 39 × 16.2 মিমি |
| ওজন: 39।2 গ্রাম | |
| বন্দর | - 14 PWM আউটপুট (IO থেকে 8, FMU থেকে 6) |
| - 2টি সাধারণ-উদ্দেশ্য সিরিয়াল পোর্ট | |
| - 2টি জিপিএস পোর্ট | |
| - 1 I2C পোর্ট | |
| - 2 CAN পোর্ট | |
| - Spectrum/DSM, S.BUS, CPPM, ইত্যাদির জন্য RC ইনপুট | |
| - পাওয়ার ইনপুট পোর্ট | |
| অন্যান্য বৈশিষ্ট্য | অপারেটিং তাপমাত্রা: -40–85°C |
অনবোর্ড কম্পিউটার
| কম্পোনেন্ট | স্পেসিফিকেশন |
|---|---|
| কম্পিউটিং শক্তি | 40 টপস |
| জিপিইউ | 1024-কোর NVIDIA Ampere GPU সহ 32 টেনসর কোর |
| সিপিইউ | 6-কোর আর্ম কর্টেক্স-A78AE v8.2 64-বিট, 1.5GHz |
| RAM | 8GB 128-বিট LPDDR5 68GB/s |
| স্টোরেজ | SD কার্ড বা বাহ্যিক NVMe |
| সর্বোচ্চ CPU ফ্রিকোয়েন্সি | 1.5GHz |
রিমোট কন্ট্রোলার
| কম্পোনেন্ট | স্পেসিফিকেশন |
|---|---|
| অপারেটিং ভোল্টেজ | 4.2V |
| অপারেটিং কারেন্ট | 100mA |
| ফ্রিকোয়েন্সি ব্যান্ড | 2.4–2.483GHz |
| ওজন | 525 গ্রাম |
| মাত্রা | 130 × 150 × 20 মিমি |
| ব্যাটারি লাইফ | 20 ঘন্টা |
| চার্জিং পোর্ট | মাইক্রো-ইউএসবি |
| কন্ট্রোল রেঞ্জ | 7KM |
জিপিএস
| কম্পোনেন্ট | স্পেসিফিকেশন |
|---|---|
| স্যাটেলাইট রিসিভার | UBLOX-M9, 92 চ্যানেল |
| ইলেকট্রনিক কম্পাস | QMC5883L |
| স্যাটেলাইট সিস্টেম | GPS L1 C/A, GLONASS L1OF, BeiDou B1, Galileo E1 |
| স্যাটেলাইট চ্যানেল | 32 |
| হালনাগাদ হার | 25Hz |
| অবস্থান নির্ভুলতা | 1.5 মি সিইপি (আদর্শ পরিবেশ) |
| শুরুর সময় | কোল্ড স্টার্ট: 24s, হট স্টার্ট: 1s |
| মাত্রা | 25 × 25 × 8 মিমি |
| ওজন | 12 গ্রাম |
ব্যাটারি
| কম্পোনেন্ট | স্পেসিফিকেশন |
|---|---|
| সংযোগকারী প্রকার | XT60 |
| প্রস্তাবিত চার্জ বর্তমান | 3-5A |
| ব্যাটারির ক্ষমতা | 6000mAh |
| নামমাত্র ভোল্টেজ | 22।2V |
| স্রাবের হার | 75C |
| মাত্রা | 50 × 44 × 158 মিমি |
| ওজন | 816 গ্রাম |
লিডার
| কম্পোনেন্ট | স্পেসিফিকেশন |
|---|---|
| লেজার তরঙ্গদৈর্ঘ্য | 905nm |
| পরিসর | 40m @ 10% প্রতিফলন, 70m @ 80% প্রতিফলন |
| ন্যূনতম সনাক্তকরণ এলাকা | 0.1 মি |
| দেখার ক্ষেত্র | অনুভূমিক: 360°, উল্লম্ব: -7° থেকে 52° |
| পয়েন্ট ক্লাউড আউটপুট | 200,000 পয়েন্ট/সেকেন্ড |
| পয়েন্ট রেট | 10Hz |
| সুরক্ষা স্তর | IP67 |
| শক্তি | 6.5W (25°C পরিবেশ) |
| ভোল্টেজ পরিসীমা | 9–27V DC |
| মাত্রা | 65 × 65 × 60 মিমি |
| ওজন | 265 গ্রাম |
ডেপথ ক্যামেরা
| কম্পোনেন্ট | স্পেসিফিকেশন |
|---|---|
| গভীরতা প্রযুক্তি | ডুয়াল ইনফ্রারেড |
| গভীরতা দেখার কোণ | 87° × 58° (অনুভূমিক × উল্লম্ব) |
| গভীরতার রেজোলিউশন | 1280 × 720 |
| গভীরতা নির্ভুলতা | <2% 2m মধ্যে |
| গভীরতা ফ্রেমের হার | 90fps |
| গভীরতা পরিসীমা | 0.3-3 মি |
| মাত্রা | 90 × 25 × 25 মিমি |
| অপারেটিং এনভায়রনমেন্ট | ইনডোর/আউটডোর |
একক লেন্স ক্যামেরা
| কম্পোনেন্ট | স্পেসিফিকেশন |
|---|---|
| সর্বোচ্চ রেজোলিউশন | 2MP (1920 × 1080) |
| সর্বোচ্চ ফ্রেম রেট | 30fps |
| দেখার ক্ষেত্র | ~90° |
| তারের দৈর্ঘ্য | ~1।5 মি |
| মাত্রা | 35 × 35 × 30 মিমি |
ফাংশন টেবিল
| unction | মৌলিক কনফিগারেশন | ঐচ্ছিক D435 | ঐচ্ছিক D435 + 4G মডিউল |
|---|---|---|---|
| উচ্চতা হোল্ড, হোভারিং, বাড়িতে ফিরে | ✔ | ✔ | ✔ |
| অবতরণ, স্থিতিশীলতা, ওয়েপয়েন্ট ফ্লাইট | ✔ | ✔ | ✔ |
| রিমোট কন্ট্রোল ফ্লাইট | ✔ | ✔ | ✔ |
| ফ্লাইট কন্ট্রোলার এবং অনবোর্ড কম্পিউটারের মধ্যে যোগাযোগ | ✔ | ✔ | ✔ |
| QR কোড স্বীকৃতি এবং অবতরণ | ✔ | ✔ | ✔ |
| অবজেক্ট রিকগনিশন এবং ড্রপিং | ✔ | ✔ | ✔ |
| একযোগে ম্যাপিং এবং বাধা এড়ানো | ✔ | ✔ | ✔ |
| 3D LiDAR ম্যাপিং এবং পজিশনিং | ✔ | ✔ | ✔ |
| YOLO-ভিত্তিক বস্তুর স্বীকৃতি | ✘ | ✔ | ✔ |
| অবজেক্ট রিকগনিশন এবং ট্র্যাকিং | ✘ | ✔ | ✔ |
| 4G রিমোট কন্ট্রোল | ✘ | ✘ | ✔ |
প্যাকেজ অন্তর্ভুক্ত
মৌলিক কনফিগারেশন
- ফ্রেম: F290 কার্বন ফাইবার ফ্রেম
- মোটর: 4× টি-মোটর F100 Kv1100
- ইএসসি: 4× FlyFun T-rex 5 45A
- প্রোপেলার: 4×7-ইঞ্চি ট্রাই-ব্লেড প্রোপেলার
- ফ্লাইট কন্ট্রোলার: Pixhawk6mini
- ব্যাটারি: 6S স্ট্যান্ডার্ড ব্যাটারি 6000mAh
- চার্জার: 6S ব্যাটারি চার্জার
- অনবোর্ড কম্পিউটার: Jetson Orin Nano 8G + WIFI মডিউল
- এসএসডি: 256 জি
- লিডার: Livox MID360
- ক্যামেরা: 150° ওয়াইড-এঙ্গেল ইউএসবি ক্যামেরা
- রিমোট কন্ট্রোলার: ক্লাউড T10 (ডেটা রিসিভার সহ)
ঐচ্ছিক কনফিগারেশন: D435
থেকে সমস্ত উপাদান অন্তর্ভুক্ত মৌলিক কনফিগারেশন, প্লাস:
- ডুয়াল-লেন্স ক্যামেরা: D435
ঐচ্ছিক কনফিগারেশন: D435 + 4G মডিউল
থেকে সমস্ত উপাদান অন্তর্ভুক্ত মৌলিক কনফিগারেশন, প্লাস:
- ডুয়াল-লেন্স ক্যামেরা: D435
- 4G মডিউল
বিস্তারিত
S2-F290 প্রোগ্রামেবল ড্রোন
- ✔ প্রযুক্তিগত সহায়তা, ঝামেলা-মুক্ত বিক্রয়োত্তর পরিষেবা
- ✔ কাস্টমাইজযোগ্য প্রতিযোগিতার উদাহরণ প্রদান করে
- ✔ চাইনিজ/ইংরেজি মোবাইল গ্রাউন্ড স্টেশন
- ✔ উচ্চ স্থিতিশীলতা, উচ্চ কর্মক্ষমতা
- ✔ ইনডোর/আউটডোর
S2-F290 হল একটি অত্যাধুনিক ড্রোন যা ড্রোন রেসিংয়ের জন্য তৈরি, অনুসন্ধান এবং উদ্ভাবনে বিশেষীকরণ।উন্নত প্রযুক্তি এবং সীমাহীন সৃজনশীলতাকে একীভূত করার জন্য ডিজাইন করা হয়েছে, এটি বিভিন্ন জটিল পরিবেশের সাথে খাপ খাইয়ে নিতে সক্ষম, যা বায়বীয় অন্বেষণকে আরও অ্যাক্সেসযোগ্য এবং কার্যকর করে তোলে।
এই ড্রোনটি অপরিমেয় শক্তি সহ একটি কমপ্যাক্ট ডিজাইনের বৈশিষ্ট্য রয়েছে। এটি প্রচুর প্রতিযোগিতার উদাহরণ প্রদান করে, যা ব্যবহারকারীদের দ্রুত আয়ত্ত করতে এবং এর কার্যকারিতা অপ্টিমাইজ করতে দেয়। একটি ডেডিকেটেড চাইনিজ/ইংরেজি মোবাইল গ্রাউন্ড স্টেশন দিয়ে সজ্জিত, এটি ড্রোন পরিচালনার সুবিধাকে ব্যাপকভাবে উন্নত করে। উপরন্তু, এটি প্রতিযোগিতামূলক সোর্স কোড ব্যাখ্যা এবং কাস্টমাইজযোগ্যতা প্রদান করে যাতে ব্যবহারকারীরা প্রতিযোগিতামূলক পরিস্থিতিতে উৎকর্ষ সাধনের সময় স্বল্পতম সময়ে তাদের কাঙ্খিত কার্যকারিতা অর্জন করতে পারে।

উন্নয়ন/প্রতিযোগিতা/গবেষণার প্রয়োজনীয়তা পূরণ করা
| শ্রেণী | বিস্তারিত |
|---|---|
| ROS মৌলিক জ্ঞান | - রিমোট কন্ট্রোল |
| - ফ্লাইট কন্ট্রোলার এবং অনবোর্ড কম্পিউটারের মধ্যে যোগাযোগ | |
| মৌলিক ফাংশন | - রুট পরিকল্পনা |
| - QR কোড স্বীকৃতি এবং অবস্থান | |
| - অফবোর্ড স্বায়ত্তশাসিত টহল | |
| উন্নত ফাংশন | - ল্যান্ডিংয়ের জন্য QR কোড স্বীকৃতি |
| - অবজেক্ট রিকগনিশন এবং ড্রপিং | |
| - একযোগে ম্যাপিং এবং বাধা এড়ানো | |
| - 3D LiDAR ম্যাপিং এবং পজিশনিং | |
| - YOLO-ভিত্তিক অবজেক্ট রিকগনিশন | |
| - ওয়েব-ভিত্তিক ভিডিও ট্রান্সমিশন | |
| - বহিরঙ্গন গঠন উড়ন্ত | |
| - স্থল-বায়ু সহযোগিতামূলক গঠন | |
| ঐচ্ছিক D435 ক্যামেরা ফাংশন | - ভিআইএনএস ভিজ্যুয়াল পজিশনিং |
| - YOLO-ভিত্তিক অবজেক্ট রিকগনিশন এবং ট্র্যাকিং | |
| ঐচ্ছিক 4G কমিউনিকেশন ফাংশন | - 4G রিমোট কন্ট্রোল |
স্বায়ত্তশাসিত বাধা পরিহার, ব্যাপক নিরাপত্তা নিশ্চয়তা
স্বায়ত্তশাসিত বাধা পরিহারের জন্য 3D LiDAR ব্যবহার করে, ড্রোনটি সমস্ত দিক থেকে প্রতিবন্ধকতাগুলিকে সঠিকভাবে সনাক্ত করতে স্থানীয় গতিশীল বাধা পরিহারের সাথে বিশ্বব্যাপী রুট পরিকল্পনাকে একত্রিত করে। এটি স্বয়ংক্রিয় থামার পাশাপাশি ক্রমাগত ফ্লাইট সমর্থন করে, ফ্লাইট পথ বরাবর বস্তুর নমনীয় পরিহার সক্ষম করে, নিরাপদ ফ্লাইট অভিজ্ঞতা নিশ্চিত করে।

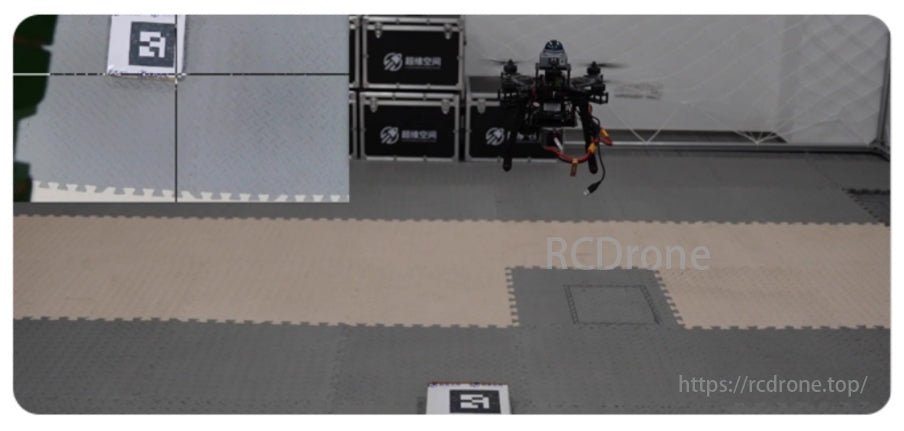
QR কোড স্বীকৃতি এবং অবতরণ
QR কোডের রিয়েল-টাইম অবস্থানগত তথ্য অর্জন করতে ড্রোন ক্যামেরা এবং QR কোড স্বীকৃতি মডিউল সক্রিয় করে। অবতরণের সময়, ড্রোনটি গতিশীলভাবে তার অবস্থান সামঞ্জস্য করে, অবতরণ করার আগে ক্যামেরার দৃশ্যের ক্ষেত্রের সাথে সুনির্দিষ্ট প্রান্তিককরণ নিশ্চিত করে।
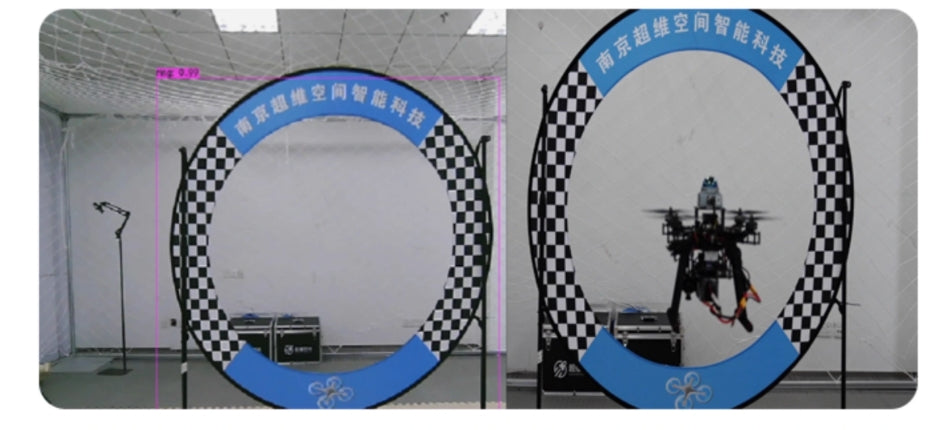
YOLO অবজেক্ট রিকগনিশন
ড্রোনটি বস্তুর স্বীকৃতির জন্য YOLOv8 ব্যবহার করে, রিয়েল টাইমে বৃত্তাকার ফ্রেমের অবস্থানগত তথ্য অর্জন করে। এটি স্বায়ত্তশাসিতভাবে তার অবস্থান সামঞ্জস্য করে এবং বৃত্তাকার ফ্রেমের মাধ্যমে নেভিগেট করে।
বহিরঙ্গন গঠন উড়ন্ত
ড্রোনটি ঝাঁক গঠন প্রযুক্তি ব্যবহার করে, গঠন ফ্লাইট অর্জনের জন্য একাধিক ড্রোনের সমন্বিত নিয়ন্ত্রণ সক্ষম করে।উন্নত যোগাযোগ এবং সহযোগিতামূলক নিয়ন্ত্রণ অ্যালগরিদমগুলিকে কাজে লাগিয়ে, এটি ড্রোনগুলির মধ্যে রিয়েল-টাইম যোগাযোগ এবং তথ্য বিনিময়কে সহজতর করে, তাদের গতিবিধি এবং অবস্থানগুলিকে সুসংগত করে একটি শক্ত গঠন তৈরি করে৷

স্থল-বায়ু সহযোগিতামূলক গঠন
এই প্ল্যাটফর্মটি স্থল ও আকাশ ড্রোনের মধ্যে সহযোগিতামূলক গঠনকে সমর্থন করে। ডিভাইস ইন্টারকানেক্টিভিটির জন্য টপোলজি স্ট্রাকচার সহ একটি লোকাল এরিয়া নেটওয়ার্ক ব্যবহার করে, এটি উচ্চ-গতি এবং স্থিতিশীল যোগাযোগ নিশ্চিত করতে UDP যোগাযোগ এবং কাস্টম প্রোটোকল ব্যবহার করে। পিআইডি নিয়ন্ত্রণের সাথে, এটি প্রধান ড্রোন এবং একাধিক স্লেভ ড্রোনের মধ্যে সিঙ্ক্রোনাইজড অনুসরণ করে, গঠনের স্থিতিশীলতা এবং অপারেশনাল দক্ষতা নিশ্চিত করে।

প্রতিযোগিতার উদাহরণ
ধাপে ধাপে নির্দেশিকা সহ একচেটিয়া প্রতিযোগিতার পরিস্থিতি প্রদান করে, যা অংশগ্রহণকারীদের বিভিন্ন ধরনের প্রতিযোগিতায় সহজেই মানিয়ে নিতে সক্ষম করে।



S2-F290 প্রোগ্রামেবল ড্রোনের বৈশিষ্ট্য
উচ্চ খরচ-কর্মক্ষমতা
- নতুনদের জন্য শেখার বক্ররেখা কমাতে এবং ড্রোন অপারেশনকে আয়ত্ত করা সহজ করার জন্য ডিজাইন করা হয়েছে।
- সাশ্রয়ী মূল্যের জন্য মূল্য, এটি ছাত্র এবং উত্সাহীদের জন্য আদর্শ শেখার ড্রোন তৈরি করে।
উচ্চ স্থিতিশীলতা
- তিন বছর ধরে বিভিন্ন চরম পরিস্থিতিতে পরীক্ষিত।
- উন্নত স্থায়িত্ব এবং স্থিতিশীলতার জন্য একটি 3 মিমি পুরু কার্বন ফাইবার ফ্রেম দিয়ে সজ্জিত।
- ব্যবহারকারীদের তাদের প্রথম প্রতিযোগিতার অভিজ্ঞতায় স্বীকৃতি পেতে অনুমতি দেয়।
সম্প্রসারণযোগ্যতা
- বিভিন্ন অ্যাপ্লিকেশনের জন্য উন্নত কাস্টমাইজেশন সমর্থন করে।
- ক্রমাগত ড্রোন কর্মক্ষমতা এবং কার্যকারিতা উন্নত করতে বিভিন্ন সম্প্রসারণ উপাদানের সাথে সামঞ্জস্যপূর্ণ।
উদ্বেগ-মুক্ত বিক্রয়োত্তর পরিষেবা
- পেশাদার দল ব্যাপক দিকনির্দেশনা এবং সহায়তা প্রদান করে।
- ওয়ারেন্টি সময়কালে অপারেশনাল ত্রুটির কারণে হার্ডওয়্যারের ক্ষতির জন্য বিনামূল্যে মেরামতের অফার করে (আনুষাঙ্গিক এবং ব্যাটারি ব্যতীত)।
কাস্টমাইজযোগ্য
- ROS এবং QGC-তে একচেটিয়া উন্নয়নের জন্য সমর্থন প্রদান করে।
- ম্যাপিং এবং নেভিগেশনের জন্য 98% এর বেশি উচ্চ নির্ভুলতা সমর্থন করে।
- RTK/GPS মডিউল, লোগো এবং বিভিন্ন অনন্য কার্যকারিতার সাথে সামঞ্জস্যপূর্ণ।

গ্রাউন্ড স্টেশন কনফিগারেশন
Pixhawk 2.4.8 ফ্লাইট কন্ট্রোলার ব্যবহার করা
লেটেস্ট স্ট্যান্ডার্ড 32-বিট STM32F427 প্রসেসর এবং MS5611 ব্যারোমিটার দিয়ে সজ্জিত, এই ফ্লাইট কন্ট্রোলারটি ওপেন-সোর্স বিকল্প হিসাবে প্রচুর ইন্টারফেস এবং উচ্চ খরচ-পারফরম্যান্স অফার করে।
1. এক্সক্লুসিভ গভীরভাবে কাস্টমাইজড QGC গ্রাউন্ড স্টেশন
- চীনা ভাষায় 98% এর বেশি স্থানীয়করণ অর্জন করে।
- NTRIP এর মতো উন্নত বৈশিষ্ট্যগুলিকে সমর্থন করে।
2. মোবাইল QGC গ্রাউন্ড স্টেশন
- QGC গ্রাউন্ড স্টেশনের একটি মোবাইল সংস্করণ প্রদান করে, একটি স্মার্টফোন থেকে নির্বিঘ্ন অপারেশন সক্ষম করে।
3. Wi-Fi বা 4G সরাসরি সংযোগ
- স্মার্টফোন বা কম্পিউটার ব্যবহার করে কাজ করার জন্য কেবল Wi-Fi এর মাধ্যমে সংযোগ করুন৷
- দ্রষ্টব্য: "ezuav" সিস্টেম দেখায় যে এটি ডিভাইসের সাথে সংযুক্ত কিন্তু ইন্টারনেট অ্যাক্সেস প্রদান করতে পারে না।

ব্যাপক টিউটোরিয়াল এবং সম্পূর্ণ ওপেন সোর্স রিসোর্স
- S2-F290 ড্রোনের কার্যকারিতার সমস্ত দিক কভার করে অত্যন্ত বিস্তারিত ব্যবহারের টিউটোরিয়াল।
- সম্পূর্ণরূপে ওপেন সোর্স উপকরণ, সহ:
- সফ্টওয়্যার ভূমিকা এবং ইনস্টলেশন গাইড.
- মৌলিক এবং উন্নত বৈশিষ্ট্যগুলির জন্য টিউটোরিয়াল, যেমন OpenCV-ভিত্তিক অবজেক্ট রিকগনিশন, 3D ম্যাপিং এবং অফবোর্ড স্বায়ত্তশাসিত ফ্লাইট।
- PX4 এবং MAVLink যোগাযোগের জন্য কাস্টম উন্নয়ন নির্দেশাবলী।
- প্রায়শই জিজ্ঞাসিত প্রশ্নাবলী, ROS পরিবেশ কনফিগারেশন এবং অপারেশনাল পদক্ষেপগুলি সমাধান করা।
Related Collections


