









SteadyWin GIM3510-8 ছোট রোবট জয়েন্ট মডিউল, ৮:১ প্ল্যানেটারি গিয়ার, CAN ড্রাইভার, ডুয়াল এনকোডার, ২৪V ৬০W
SteadyWin GIM3510-8 ছোট রোবট জয়েন্ট মডিউল, ৮:১ প্ল্যানেটারি গিয়ার, CAN ড্রাইভার, ডুয়াল এনকোডার, ২৪V ৬০W
SteadyWin
নিয়মিত দাম
$109.00 USD
নিয়মিত দাম
$120.00 USD
বিক্রয় মূল্য
$109.00 USD
একক দাম
per
Taxes included.
শিপিং চেকআউটের সময় গণনা করা হয়।
পিকআপের উপলভ্যতা লোড করা যায়নি
Overview
মূল বৈশিষ্ট্য
- হাই-স্পিড প্ল্যানেটারি রিডাকশন: 8:1 প্ল্যানেটারি গিয়ারবক্স যার রেটেড আউটপুট স্পিড 535.5 rpm এবং সর্বাধিক 564.6 rpm (GDZ34), দ্রুত চলমান জয়েন্টগুলির জন্য উপযুক্ত।
- বিস্তৃত ভোল্টেজ পরিসর: নমিনাল 24 V অপারেশন 12–40 V (GDZ34) বা 12–48 V (GDS34) ইনপুট পরিসরের জন্য নমনীয় পাওয়ার সিস্টেম ডিজাইনের জন্য।
- কার্যকর টর্ক আউটপুট: টর্ক কনস্ট্যান্ট 0.32 N.m/এ সহ রেটেড টর্ক 1.68 N.m এবং পিক টর্ক 6.02 N.m, হালকা থেকে মাঝারি-দায়িত্ব রোবোটিক জয়েন্টগুলির জন্য কার্যকর শক্তি স্থানান্তর প্রদান করে।
- ইন্টিগ্রেটেড ড্রাইভার সহ CAN বাস: বিল্ট-ইন ড্রাইভার বোর্ড (GDS34 বা GDZ34) সহজতর তারের সংযোগ এবং নেটওয়ার্ক নিয়ন্ত্রণের জন্য CAN যোগাযোগ সমর্থন করে।
- ডুয়াল এনকোডার ফিডব্যাক: ড্রাইভারে 14-বিট এনকোডার এবং আউটপুট শ্যাফটে দ্বিতীয় এনকোডার সঠিক অবস্থান এবং গতি ফিডব্যাকের জন্য।
- কমপ্যাক্ট স্ট্রাকচার: মাত্র 46 মিমি বাইরের ব্যাস এবং মোট দৈর্ঘ্য 46.5 মিমি (ড্রাইভার ছাড়া) থেকে 51.5 মিমি (ড্রাইভার সহ), ঘন মাল্টি-জয়েন্ট লেআউট সক্ষম করে।
- পরিবেশগত স্থায়িত্ব: IP54 সুরক্ষা রেটিং, কার্যকরী তাপমাত্রা -20°C থেকে +80°C, এবং শব্দ স্তর 60 dB এর নিচে।
- সুরক্ষা কার্যাবলী: অতিরিক্ত তাপমাত্রা, অতিরিক্ত ভোল্টেজ, এবং অতিরিক্ত লোড সুরক্ষা ধারাবাহিক-দায়িত্ব রোবোটিক সিস্টেমে নিরাপদ, নির্ভরযোগ্য অপারেশন বজায় রাখতে সহায়তা করে।
- যান্ত্রিক দৃঢ়তা: আউটপুট শ্যাফটে 75 N অক্ষীয় লোড এবং 300 N রেডিয়াল লোড সমর্থন করে, 15 আর্কমিন রিডিউসার ব্যাকল্যাশ সহ।
- কাস্টম ব্রেক বিকল্প: অক্ষম হলে হোল্ডিং টর্ক প্রয়োজন এমন জয়েন্টগুলির জন্য কাস্টম ব্রেক ইন্টিগ্রেশন সমর্থন করে।
GIM3510-8 ছোট রোবট জয়েন্ট মডিউল সম্পর্কে প্রযুক্তিগত সহায়তা, কাস্টমাইজেশন, বা ইন্টিগ্রেশন প্রশ্নের জন্য, দয়া করে যোগাযোগ করুন https://rcdrone.top/ অথবা ইমেইল করুন [email protected].
অ্যাপ্লিকেশন
- মানবাকৃতির রোবট
- রোবটিক হাত
- এক্সোস্কেলেটন
- চতুর্ভুজ রোবট
- এজিভি যানবাহন
- এআরইউ রোবট
স্পেসিফিকেশন
| প্যারামিটার | ইউনিট | GIM3510-8 + GDS34 (SDC101) | GIM3510-8 + GDZ34 |
|---|---|---|---|
| মডেল | - | GIM3510-8 | GIM3510-8 |
| ড্রাইভার বোর্ড মডেল | - | GDS34 (SDC101) | GDZ34 |
| নমিনাল ভোল্টেজ | V | 24 | 24 |
| ভোল্টেজ পরিসীমা | V | 12–48 | 12–40 |
| রেটেড পাওয়ার | W | 98 | 60 |
| রেটেড টর্ক | N.m | 1.68 | 1.00 |
| শীর্ষ টর্ক | N.m | 3.41 | 6.02 |
| হ্রাসের পর রেটেড গতি | rpm | 430 | 535.5 |
| হ্রাসের পর সর্বাধিক গতি | rpm | 529 | 564.6 |
| রেটেড কারেন্ট | A | 4.1 | 2.5 |
| শীর্ষ কারেন্ট | A | 8.30 | 25.30 |
| ফেজ প্রতিরোধক | ohm | 0.48 | 0.48 |
| ফেজ ইন্ডাকট্যান্স | mH | 0.31 | 0.31 |
| গতি ধ্রুবক | rpm/V | 22.04 | 23.53 |
| টর্ক ধ্রুবক | N.m/A | 0.44 | 0.32 |
| পোল জোড়ের সংখ্যা | জোড় | 7 | 7 |
| গিয়ার অনুপাত | - | 8:1 | 8:1 |
| গিয়ার প্রকার | - | প্ল্যানেটারি | প্ল্যানেটারি |
| রিডিউসার গিয়ার উপাদান | - | এলিউ | এলিউ |
| রিডিউসার গিয়ার ব্যাকল্যাশ | আর্কমিন | 15 | 15 |
| ড্রাইভার ছাড়া মোটরের ওজন | গ্রাম | 247.6 | 247.6 |
| ড্রাইভার সহ মোটরের ওজন | গ্রাম | 259.6 | 259.6 |
| ড্রাইভার ছাড়া আকার (ব্যাস x দৈর্ঘ্য) | মিমি | Ø46 x 46.5 | Ø46 x 46.5 |
| ড্রাইভার সহ আকার (ব্যাস x দৈর্ঘ্য) | মিমি | Ø46 x 51.5 | Ø46 x 51.5 |
| সর্বাধিক অক্ষীয় লোড | N | 75 | 75 |
| সর্বাধিক রেডিয়াল লোড | N | 300 | 300 |
| শব্দ | dB | <60 | <60 |
| যোগাযোগ | - | CAN | CAN |
| আউটপুট শ্যাফটে দ্বিতীয় এনকোডার | - | হ্যাঁ | হ্যাঁ |
| রক্ষণের গ্রেড | - | IP54 | IP54 |
| চালনার তাপমাত্রা | °C | -20 থেকে +80 | -20 থেকে +80 |
| এনকোডার রেজোলিউশন (ড্রাইভার এনকোডার) | বিট | 14 | 14 |
| বিভিন্ন এনকোডার সমর্থন | - | না | না |
| কাস্টম ব্রেক সাপোর্ট | - | হ্যাঁ | হ্যাঁ |
ম্যানুয়াল
- SteadyWin_GIM3510-8_ইনস্টলেশন_ডায়াগ্রাম.stp
- GlM3510-8_স্থাপন_অঙ্কন.pdf
- Gl3510-8_ব্রেক_স্থাপন_অঙ্কন.pdf
বিস্তারিত

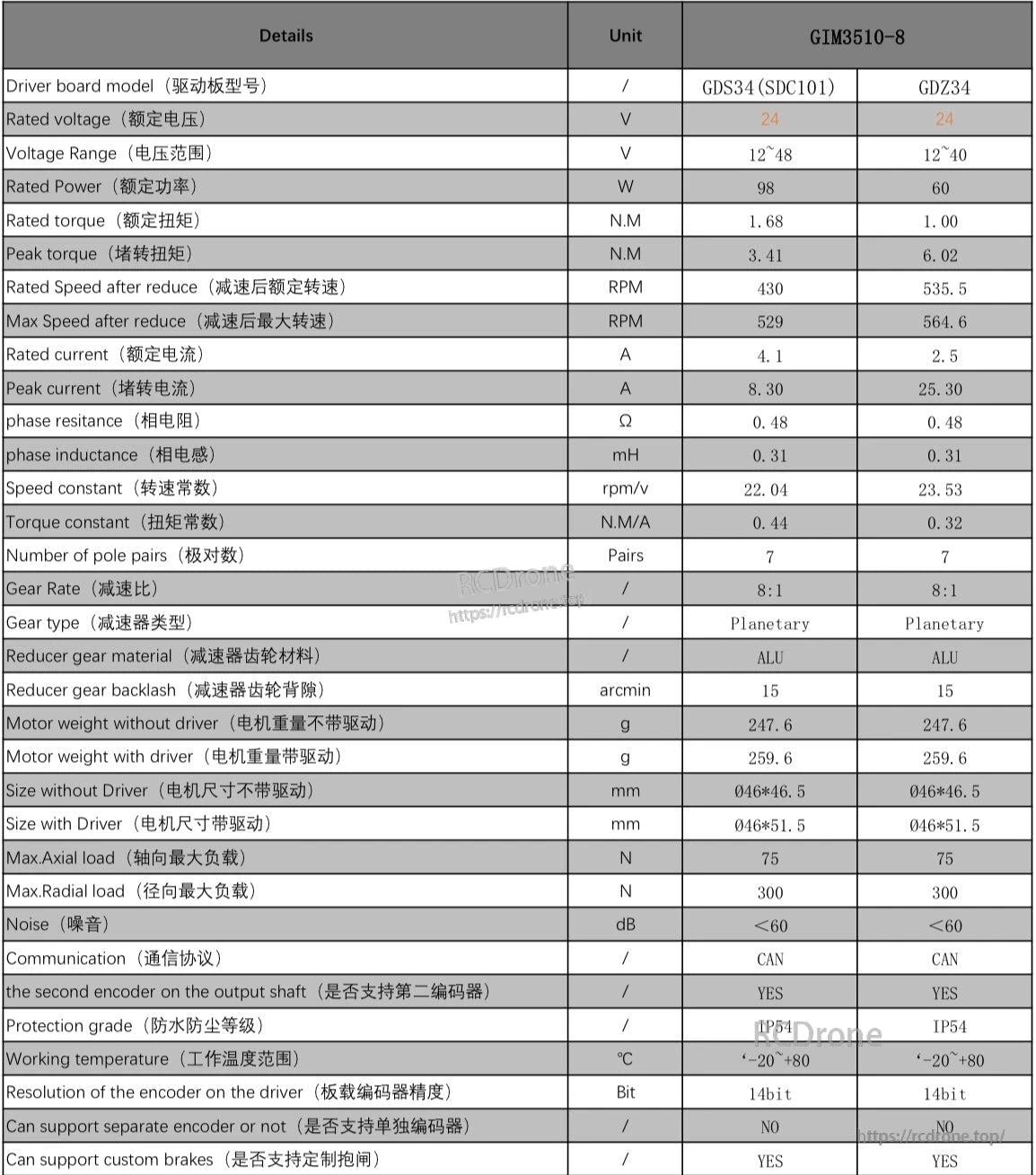
GIM3510-8 রোবট জয়েন্ট স্পেসিফিকেশন GDS34 এবং GDZ34 ড্রাইভার বোর্ডের সাথে তুলনা করুন। মূল মেট্রিকগুলির মধ্যে রয়েছে ভোল্টেজ, শক্তি, টর্ক, গতি, কারেন্ট, ওজন, আকার, লোড ক্ষমতা, শব্দ, যোগাযোগ, এনকোডার, সুরক্ষা গ্রেড, তাপমাত্রার পরিসর, এবং কাস্টম ব্রেক সমর্থন।
Related Collections









