CUAV উচ্চ নির্ভুলতা RM3100 C-কম্পাস এক্সটার্নাল কম্পাস ম্যাগনেটোমিটার Pixhawk PX4 ArduPilot DroneCAN/UAVCAN-এর জন্য
CUAV উচ্চ নির্ভুলতা RM3100 C-কম্পাস এক্সটার্নাল কম্পাস ম্যাগনেটোমিটার Pixhawk PX4 ArduPilot DroneCAN/UAVCAN-এর জন্য
CUAV
নিয়মিত দাম
$203.00 USD
নিয়মিত দাম
বিক্রয় মূল্য
$203.00 USD
একক দাম
per
Taxes included.
শিপিং চেকআউটের সময় গণনা করা হয়।
পিকআপের উপলভ্যতা লোড করা যায়নি
অভিধান
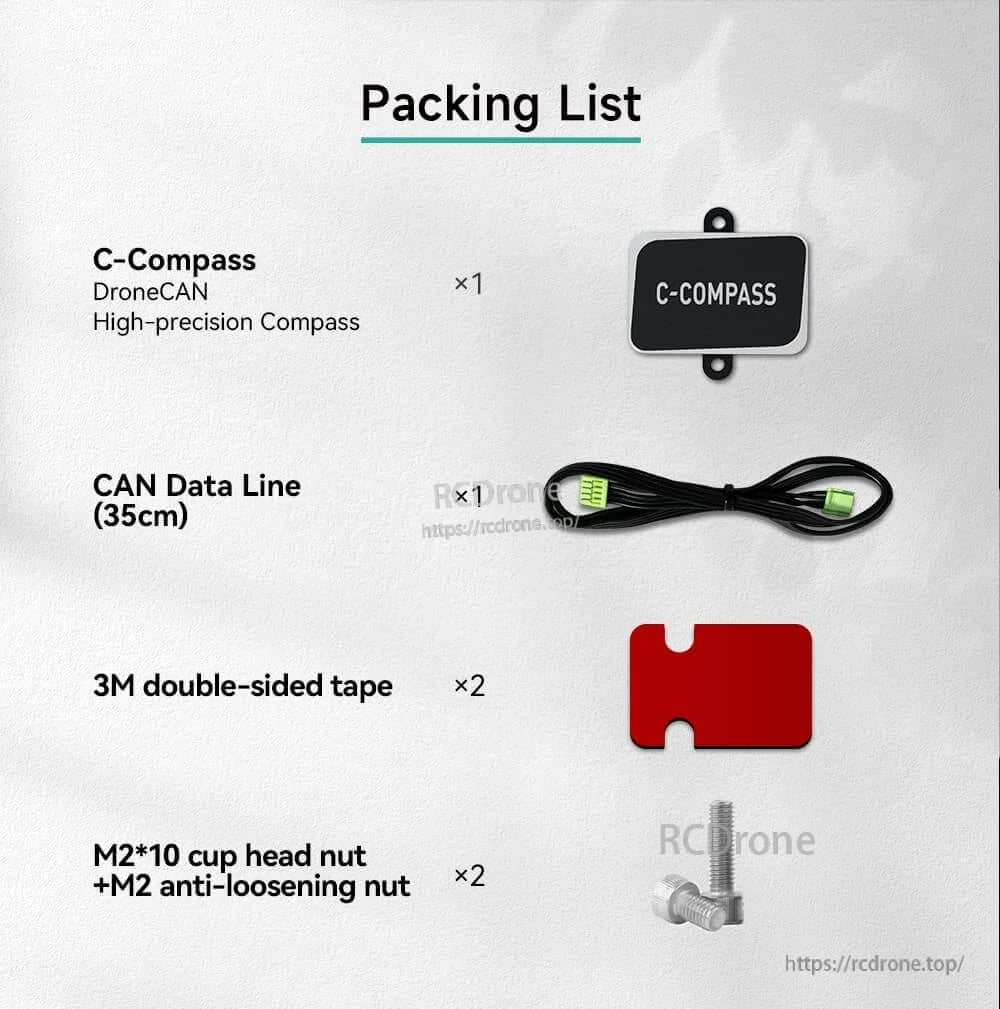
CUAV C-Compass একটি বাইরের কম্পাস (উচ্চ-নির্ভুল ম্যাগনেটোমিটার) যা RM3100 ম্যাগনেটিক সেন্সরের চারপাশে নির্মিত হয়েছে Pixhawk এবং PX4 কন্ট্রোলার ইকোসিস্টেমের জন্য। এটি DroneCAN/UAVCAN বাস যোগাযোগ ব্যবহার করে এবং ArduPilot এবং PX4 প্ল্যাটফর্মের সাথে সামঞ্জস্যপূর্ণ, একটি বিল্ট-ইন STM32F4 প্রসেসর সহ যা CUAV M4C সফটওয়্যার আর্কিটেকচার চালায় বৈদ্যুতিকভাবে শব্দযুক্ত এয়ারফ্রেমে স্থিতিশীল দিক পরিমাপের জন্য।
মূল বৈশিষ্ট্য
- RM3100 চৌম্বক সেন্সর
- নির্মিত STM32F4 প্রসেসর
- CUAV স্ব-উন্নত M4C সফটওয়্যার আর্কিটেকচার
- APM/PX4 ফ্লাইট সফটওয়্যার প্ল্যাটফর্মের সাথে সামঞ্জস্যপূর্ণ
- DroneCAN/UAVCAN প্রোটোকল সমর্থন
- বাহ্যিক কম্পাস হিসেবে ব্যবহৃত হলে কম শব্দ এবং বিরোধী হস্তক্ষেপের কার্যকারিতা ডিজাইন করা হয়েছে
স্পেসিফিকেশন
| MCU | STM32F412 (32 বিট Arm Cortex-M4, 100MHz, 512KB FLASH, 256KB RAM) |
| সেন্সর | RM3100 |
| সফটওয়্যার আর্কিটেকচার | CUAV M4C |
| প্রোটোকল | DroneCAN/UAVCAN |
| যোগাযোগের হার | 2Mb |
| রিফ্রেশ রেট | 80Hz |
| শব্দ | 15nT |
| সঠিকতা | 0.২৫° (কার্যকর মান) |
| পুনরাবৃত্তি সঠিকতা | ০.০৫° |
| রেজোলিউশন | ০.০১° |
| সংবেদনশীলতা | ১৩nT |
| পরিসর | -৮০০ μT থেকে +৮০০ μT |
| নিয়ন্ত্রক প্রকার | PX4/ArduPilot (CUAV/Pixhawk ইত্যাদি) |
| ইন্টারফেস | GHR-04V-S |
| চালনার ভোল্টেজ | ৪.৭৫-৫.৩V |
| চালনার তাপমাত্রা | -২০ থেকে ৮০°C |
| চালনার আর্দ্রতা | ৫% থেকে ৯৫% (অ-কনডেন্সিং) |
| কেসিং উপাদান | অ্যালুমিনিয়াম খাদ |
| আকার | ৩১.৫ x ৩১.০ x ১৪.0mm |
| ওজন | 13g |
| তালিকাভুক্ত ওজন | 0.5 kg |
| তালিকাভুক্ত মাত্রা | 20 x 10 x 10 সেমি |
বিকল্পসমূহ
- C-কম্পাস * 3 পিস
- C-কম্পাস & NEO 3 GPS / সেট
- C-কম্পাস & NEO 3 Pro GPS / সেট
- C-কম্পাস & NEO 3X GPS / সেট
অ্যাপ্লিকেশনসমূহ
- PX4 বা ArduPilot চালিত Pixhawk এবং CUAV অটোপাইলট নির্মাণের জন্য বাইরের কম্পাস/হেডিং সেন্সিং
- হস্তক্ষেপের উৎস (কেবল, ব্যাটারি, মোটর) থেকে দূরে মাউন্ট করে চৌম্বক পরিমাপের স্থিতিশীলতা উন্নত করা
একীকরণ এবং সামঞ্জস্যের প্রশ্নের জন্য (DroneCAN/UAVCAN সেটআপ, ArduPilot/PX4 প্যারামিটার, তারের সংযোগ), যোগাযোগ করুন [email protected] or পরিদর্শন করুন https://rcdrone.top/.
Related Collections