SU17 রিসার্চ ড্রোন - PX4 ওপেন সোর্স ইন্ডাস্ট্রিয়াল ড্রোন ডেভেলপমেন্ট সহ MID-360 LiDAR, Quad-Camera SLAM, EGO-Swarm
SU17 রিসার্চ ড্রোন - PX4 ওপেন সোর্স ইন্ডাস্ট্রিয়াল ড্রোন ডেভেলপমেন্ট সহ MID-360 LiDAR, Quad-Camera SLAM, EGO-Swarm
RCDrone
পিকআপের উপলভ্যতা লোড করা যায়নি
ওভারভিউ
SU17 রিসার্চ ড্রোন হল একটি উচ্চ-কার্যক্ষমতাসম্পন্ন কোয়াডকপ্টার যা একটি 6000mAh ব্যাটারি, MID-360 LiDAR 3D ম্যাপিংয়ের জন্য, কোয়াড-ক্যামেরা SLAM সিস্টেম সুনির্দিষ্ট স্থানীয়করণের জন্য, এবং সমন্বিত GPS+GLONASS পজিশনিং. একটি টেকঅফ ওজন সঙ্গে 2.3 কেজি এবং ক পেলোড ক্ষমতা 200 গ্রাম, এটা অফার ফ্লাইটের সময় 21 মিনিট ভিজ্যুয়াল পজিশনিং মোডে। প্রমিথিউস সফ্টওয়্যার দ্বারা চালিত, এটি লক্ষ্য শনাক্তকরণ, পথ পরিকল্পনা এবং স্বায়ত্তশাসিত নেভিগেশন সমর্থন করে, এটি একটি শিল্প-গ্রেড গবেষণা এবং উদ্ভাবনের জন্য সমাধান।
হার্ডওয়্যার পরামিতি
বিমান
| প্যারামিটার | বর্ণনা |
|---|---|
| বিমানের ধরন | কোয়াডকপ্টার |
| টেকঅফ ওজন (প্রায়) | 2.3 কেজি (প্রতিরক্ষামূলক কভার এবং ব্যাটারি সহ) |
| তির্যক দূরত্ব | 320 মিমি |
| মাত্রা | দৈর্ঘ্য: 442 মিমি, প্রস্থ: 388 মিমি, উচ্চতা: 174 মিমি (প্রতিরক্ষামূলক কভার ব্যতীত) |
| সর্বোচ্চ পেলোড | 200 গ্রাম |
| হোভারিং ফ্লাইট সময় | প্রায় 13 মিনিট (100% এ হোভার সহ, 0% এর নিচে নয়), ভিজ্যুয়াল পজিশনিং: 21 মিনিট |
| হোভারিং সঠিকতা | GPS: উল্লম্ব ±1.5 মি, অনুভূমিক ±2.0 মি |
| 3D LiDAR SLAM: উল্লম্ব ±0.08 মি, অনুভূমিক ± 0.08 মি | |
| 4-ক্যামেরা ভিজ্যুয়াল SLAM: উল্লম্ব ±0.05 মি, অনুভূমিক ± 0.05 মি | |
| বায়ু প্রতিরোধের স্তর | লেভেল 4 |
| অপারেটিং তাপমাত্রা | -10°C থেকে 40°C |
| প্রধান MCU চিপ | STM32H743 |
| আইএমইউ | ICM42688/BMI088 |
| ব্যারোমিটার | MS5611 |
| কম্পাস | QMC5883L |
| ইন্টারফেস | ইউএসবি টাইপ-সি |
অনবোর্ড কম্পিউটার
| প্যারামিটার | বর্ণনা |
|---|---|
| প্রসেসর | ইন্টেল কোর i5-8365U |
| মেমরি ক্যাপাসিটি | 8GB |
| মেমরি ফ্রিকোয়েন্সি | LPDDR3@2133MHz |
| স্টোরেজ | 256GB NVMe SSD |
| নেটওয়ার্ক পোর্ট | Baidu Apollo Ethernet X2, 12V@3A power সরবরাহ, IEEE 1588-2008 সমর্থন করে (PTP v2) |
| সিরিয়াল পোর্ট | TTL সিরিয়াল পোর্ট X2, 5V/3.3V@500mA power সরবরাহ |
| ইউএসবি | Type-C X2 (1x USB2.0, 1x USB3.0) |
| HDMI | HDMI 1.4 |
পাওয়ার ব্যাটারি
| প্যারামিটার | বর্ণনা |
|---|---|
| মডেল | SU17-L |
| ব্যাটারির ধরন | উচ্চ-চাপ লিথিয়াম পলিমার ব্যাটারি |
| রেটেড ভোল্টেজ | 26.4V (সর্বোচ্চ), 21V (মিনিট) |
| স্টোরেজ ভোল্টেজ | 22.8V (সাধারণ) |
| রেট ক্যাপাসিটি | 6000mAh |
| ওজন | 680 গ্রাম |
| মাত্রা | দৈর্ঘ্য: 85.2 মিমি, প্রস্থ: 86।5 মিমি, উচ্চতা: 135 মিমি |
রিমোট কন্ট্রোলার
| প্যারামিটার | বর্ণনা |
|---|---|
| মডেল | QE-2 |
| চ্যানেল | 8 |
| ট্রান্সমিশন পাওয়ার | 18~20 dBm |
| ওজন | 294.1 গ্রাম |
গিম্বল
| প্যারামিটার | বর্ণনা |
|---|---|
| নিয়ন্ত্রণযোগ্য কোণ | -90° ~ 30° (টিল্ট অক্ষ) |
| স্ট্রিমিং প্রোটোকল | RTSP (স্ট্যান্ডার্ড) |
| এনকোডিং বিন্যাস | H.264 |
| রেজোলিউশন | 1080P @ 25fps |
| তির্যক FOV (D) | 120° |
| উল্লম্ব FOV (V) | 54° |
| অনুভূমিক FOV (H) | 95° |
ইমেজ ট্রান্সমিশন
| প্যারামিটার | বর্ণনা |
|---|---|
| অপারেটিং ফ্রিকোয়েন্সি | 2.4GHz |
| ট্রান্সমিশন পাওয়ার | 18dBm |
| যোগাযোগ পরিসীমা | 3কিমি (কোন হস্তক্ষেপ নেই, কোন বাধা নেই) |
| চিত্র পরিসর | 1কিমি (ন্যূনতম হস্তক্ষেপ, কোন বাধা নেই) |
| সর্বোচ্চ ব্যান্ডউইথ | 40Mbps |
চারগুণ গভীরতার ক্যামেরা
| প্যারামিটার | বর্ণনা |
|---|---|
| ভিশন এক্সিলারেটর | Intel Movidius Myriad X VPU |
| সর্বোচ্চ রেজোলিউশন | 1296x816 |
| সর্বোচ্চ ফ্রেম রেট | 1280x800 @ 120fps |
| শাটার টাইপ | গ্লোবাল শাটার |
| এনকোডিং বিন্যাস | 8/10-বিট একক স্ট্রীম |
| FOV | 150° তির্যক FOV, 127.4° অনুভূমিক FOV, 79.7° উল্লম্ব FOV |
| সেন্সর সংখ্যা | 4 (2 সামনে + 2 পিছনে) |
| আইএমইউ | BMI270 |
জিএনএসএস
| প্যারামিটার | বর্ণনা |
|---|---|
| অনুভূমিক নির্ভুলতা | 1.5 মি সিইপি (এসবিএএস সহ) |
| বেগ নির্ভুলতা | 0.05 মি/সেকেন্ড |
| অপারেটিং মোড | GPS + GLONASS + BDS + গ্যালিলিও + SBAS + QZSS |
চার্জার
| প্যারামিটার | বর্ণনা |
|---|---|
| মডেল | LK150-2640500 |
| এসি ইনপুট ভোল্টেজ | 100V ~ 240V |
| ডিসি ইনপুট ভোল্টেজ | 26.4V |
| ওজন | 460 গ্রাম |
| চার্জিং কারেন্ট | 5A |
3D LiDAR
| প্যারামিটার | বর্ণনা |
|---|---|
| মডেল | MID-360 |
| লেজার তরঙ্গদৈর্ঘ্য | 905 এনএম |
| পরিমাপ পরিসীমা | 40 মি @ 10% প্রতিফলন |
| FOV | অনুভূমিক 360°, উল্লম্ব -7° ~ 52° |
| ন্যূনতম পরিসর | 0.1 মি |
| পয়েন্ট ফ্রিকোয়েন্সি | 10 Hz (সাধারণ) |
| পয়েন্ট আউটপুট | 200,000 পয়েন্ট/সে |
| ডেটা ইন্টারফেস | 100 BASE-TX ইথারনেট |
| ডেটা সিঙ্ক্রোনাইজেশন | IEEE 1588-2008 (PTP v2), GPS |
| অন্তর্নির্মিত IMU | আইসিএম40609 |
| পাওয়ার সাপ্লাই ভোল্টেজ | 7~27V |
| মাত্রা | 65 মিমি (W) x 65 মিমি (D) x 60 মিমি (H) |
| ওজন | 115 গ্রাম |
| অপারেটিং তাপমাত্রা | -20°C ~ 55°C |
সফ্টওয়্যার পরামিতি
অনবোর্ড কম্পিউটার
| প্যারামিটার | বর্ণনা |
|---|---|
| মডেল | ইন্টেল কোর i5-8365U |
| সিস্টেম | উবুন্টু 20.04 |
| ব্যবহারকারীর নাম | amov |
| পাসওয়ার্ড | amov |
| ROS | noetic |
| OpenCV | 4.7.0 |
| ভিজ্যুয়াল পজিশনিং সিস্টেম | BSA_SLAM V1 |
প্রমিথিউস সফটওয়্যার
| প্যারামিটার | বর্ণনা |
|---|---|
| সংস্করণ | v2.0 |
| প্রমিথিউস গ্রাউন্ডস্টেশন সিস্টেম | v1.24.11.27 (উইকি রিলিজ রেকর্ডের উপর ভিত্তি করে চূড়ান্ত সংস্করণ) |
বিস্তারিত
SU17 গবেষণা সংস্করণ
শিল্প-গ্রেড মানের গবেষণা ড্রোন
- ঐচ্ছিক 3D LiDAR: ম্যাপিং, পজিশনিং, এবং নেভিগেশন বাধা এড়ানো সক্ষম করে।
- প্রমিথিউস অটোনোমাস ড্রোন সফটওয়্যার: ড্রোন নিয়ন্ত্রণে দ্রুত দক্ষতার জন্য ডেমোতে সমৃদ্ধ।
- শিল্প-গ্রেড ফ্লাইট প্ল্যাটফর্ম: স্থিতিশীল এবং উন্মুক্ত, গবেষণা ড্রোন কর্মক্ষমতা জন্য একটি নতুন মান সেট করা.

মূল বৈশিষ্ট্য
SU17 গবেষণা ড্রোন ডেভেলপমেন্ট প্ল্যাটফর্ম (SU17 হিসাবে উল্লেখ করা হয়েছে) একটি সমন্বিত নকশা গ্রহণ করে, ফ্লাইট কন্ট্রোলার, অনবোর্ড কম্পিউটার, কোয়াড-ক্যামেরা SLAM মডিউল, ক্লাউড ক্যামেরা, এবং ইমেজ ট্রান্সমিশন মডিউলগুলি উচ্চ-স্তরের একীকরণের জন্য, উল্লেখযোগ্যভাবে হার্ডওয়্যার স্থিতিশীলতা এবং নির্ভরযোগ্যতা বৃদ্ধি করে। প্রমিথিউস স্বায়ত্তশাসিত ড্রোন সফ্টওয়্যার দিয়ে সজ্জিত, SU17 বিভিন্ন ফ্লাইট নিয়ন্ত্রণ পরিস্থিতির জন্য লক্ষ্য স্বীকৃতি, ট্র্যাকিং এবং পথ পরিকল্পনার মতো বৈশিষ্ট্যগুলিকে সমর্থন করে।
এটি ঐচ্ছিকভাবে MID-360 3D LiDAR, 3D LiDAR SLAM অর্জনের জন্য FAST-LIO অ্যালগরিদমের সাথে একত্রিত করে, সুনির্দিষ্ট পরিবেশগত সংবেদন এবং অবস্থানগত তথ্য প্রদান করে। EGO-Swarm পাথ প্ল্যানিং অ্যালগরিদমের সাথে যুক্ত, এটি দক্ষ রিয়েল-টাইম 3D ম্যাপিং এবং জটিল পরিবেশে বাধা এড়ানো সক্ষম করে।




Prometheus V2 সফটওয়্যার সিস্টেম
ডেভেলপমেন্ট প্ল্যাটফর্মটি ROS এবং প্রমিথিউস ওপেন-সোর্স ফ্রেমওয়ার্কের উপর নির্মিত, দক্ষ পুনঃপ্রোগ্রামিংয়ের জন্য সমৃদ্ধ কার্যকারিতা এবং ব্যাপক সেকেন্ডারি ডেভেলপমেন্ট এপিআই অফার করে। এটি পজিশনিং তথ্য, ফ্লাইট মোড, ব্যাটারি স্ট্যাটাস, আইএমইউ ডেটা এবং অন্যান্য ড্রোন স্টেট এবং সেন্সর ডেটা ইন্টারফেসে, অবস্থান, বেগ, ত্বরণ এবং মনোভাবের জন্য নিয়ন্ত্রণ ইন্টারফেসের সাথে অ্যাক্সেস প্রদান করে।
উপরন্তু, এটি সম্পর্কিত API-এর ব্যবহারের উদাহরণ অন্তর্ভুক্ত করে। অধিকন্তু, ড্রোনটিতে ফ্লাইট অপারেশনের জন্য নিরাপত্তা চেক ফাংশন রয়েছে (অ্যান্টি-ক্র্যাশ), অস্বাভাবিক পরিস্থিতিতে স্বয়ংক্রিয় অবতরণ সক্ষম করে, ক্র্যাশের ঝুঁকি হ্রাস করে এবং একটি নিরাপদ উন্নয়ন প্রক্রিয়া নিশ্চিত করে।

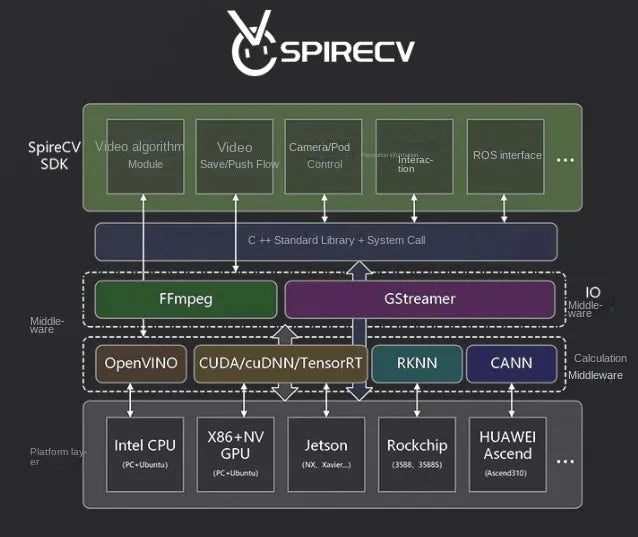
SpireCV ভিশন লাইব্রেরি
SpireCV ভিশন লাইব্রেরি হল একটি রিয়েল-টাইম ইমেজ প্রসেসিং SDK যা বিশেষভাবে বুদ্ধিমান UAV সিস্টেমের জন্য ডিজাইন করা হয়েছে। এটি জিম্বাল এবং ক্যামেরা নিয়ন্ত্রণ, ভিডিও স্টোরেজ এবং স্ট্রিমিং, লক্ষ্য সনাক্তকরণ, স্বীকৃতি এবং ট্র্যাকিংয়ের মতো কার্যকারিতা সরবরাহ করে।
এই SDK-এর লক্ষ্য হল বুদ্ধিমান UAV সিস্টেমের বিকাশকারীদের জন্য উচ্চ কার্যক্ষমতা, নির্ভরযোগ্যতা এবং একটি সুবিন্যস্ত ইন্টারফেস প্রদান করা। একটি বৈশিষ্ট্য-সমৃদ্ধ ভিজ্যুয়াল প্রসেসিং সমাধান সহ, এটি বিকাশকারীদের বিভিন্ন জটিল দৃষ্টি-ভিত্তিক অ্যাপ্লিকেশনগুলিকে দক্ষতার সাথে বাস্তবায়ন করতে সক্ষম করে।
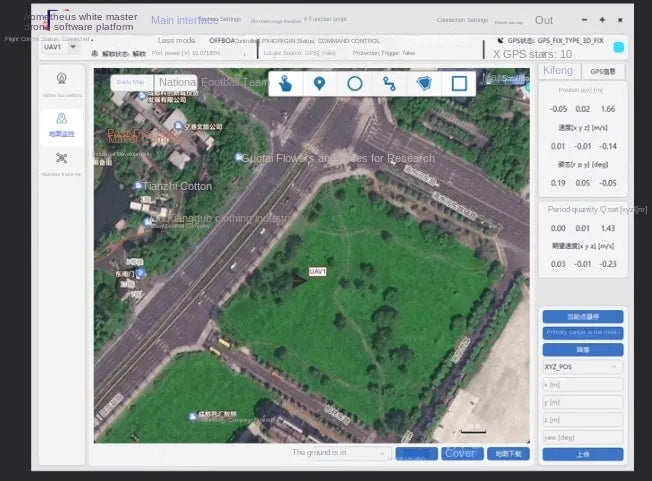
প্রমিথিউস গ্রাউন্ড স্টেশন
প্রমিথিউস গ্রাউন্ড স্টেশন হল একটি মানব-ড্রোন ইন্টারঅ্যাকশন ইন্টারফেস যা প্রমিথিউস সিস্টেমের উপর ভিত্তি করে তৈরি করা হয়েছে, যা Qt প্রযুক্তি ব্যবহার করে নির্মিত। এটি প্রমিথিউস সিস্টেমের কার্যকারিতাগুলির দ্রুত প্রতিলিপি সক্ষম করে, রিয়েল-টাইম মনিটরিং এবং ড্রোনের স্থিতি এবং নিয়ন্ত্রণ ডেটার 3D ভিজ্যুয়ালাইজেশন প্রদান করে।
গ্রাউন্ড স্টেশনের মাধ্যমে, ব্যবহারকারীরা এক-ক্লিক টেকঅফ, বর্তমান অবস্থানে হোভার, অবতরণ এবং অবস্থান নিয়ন্ত্রণের মতো কমান্ডগুলি চালাতে পারে। উপরন্তু, সিস্টেম ব্যবহারকারী-সংজ্ঞায়িত স্ক্রিপ্টগুলি শুরু করার জন্য বা কাস্টম বার্তা পাঠানোর জন্য কাস্টম ফাংশন বোতামগুলিকে সমর্থন করে, ব্যবহারকারীর ক্রিয়াকলাপের সুবিধা, দক্ষতা এবং মাপযোগ্যতা উল্লেখযোগ্যভাবে উন্নত করে।
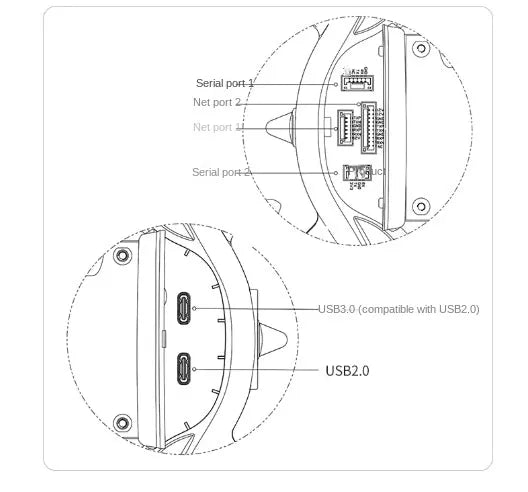
শক্তিশালী সম্প্রসারণ
হার্ডওয়্যার সম্প্রসারণ পোর্ট
-
সিরিয়াল পোর্ট 1
-
সিরিয়াল পোর্ট 2
-
নেটওয়ার্ক পোর্ট 1
-
নেটওয়ার্ক পোর্ট 2
-
ইউএসবি পোর্ট:
- USB 3.0 (USB 2.0 এর সাথে সামঞ্জস্যপূর্ণ)
- ইউএসবি 2.0
হার্ডওয়্যার ফ্রেমওয়ার্ক
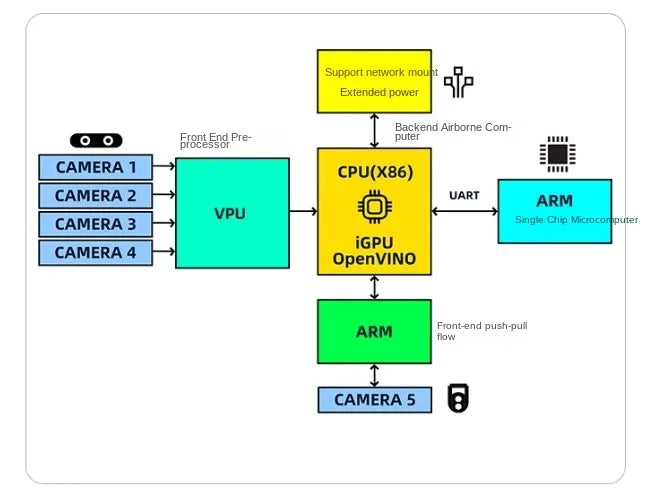
চিত্রটি SU17 ড্রোনের হার্ডওয়্যার আর্কিটেকচারকে চিত্রিত করে, উন্নত ডেটা প্রক্রিয়াকরণ এবং সিস্টেম নিয়ন্ত্রণের জন্য বিভিন্ন উপাদানের একীকরণকে হাইলাইট করে:
-
ক্যামেরা (ক্যামেরা 1-4):
সংযুক্ত a ভিপিইউ (ভিশন প্রসেসিং ইউনিট) ফ্রন্ট-এন্ড প্রিপ্রসেসিংয়ের জন্য। -
ভিপিইউ:
একাধিক ক্যামেরা থেকে ভিজ্যুয়াল ডেটা পরিচালনা করে এবং এটি প্রক্রিয়াকরণ ইউনিটে ফরোয়ার্ড করে। -
CPU (X86) সঙ্গে iGPU এবং OpenVINO:
বর্ধিত কম্পিউটেশনাল শক্তির জন্য নেটওয়ার্ক-সংযুক্ত সম্প্রসারণ ক্ষমতা সমর্থন করে, ব্যাকএন্ড প্রক্রিয়াকরণের জন্য প্রাথমিক কম্পিউটেশনাল ইউনিট হিসাবে কাজ করে। -
এআরএম একক-চিপ মাইক্রোকন্ট্রোলার:
অতিরিক্ত নিয়ন্ত্রণ কার্যকারিতার জন্য একটি UART ইন্টারফেসের মাধ্যমে CPU এর সাথে ইন্টারঅ্যাক্ট করে। -
ফ্রন্ট-এন্ড পাইপলাইনিং এবং ক্যামেরা 5:
আরও ডেটা স্ট্রিমলাইন করার জন্য একটি ডেডিকেটেড এআরএম প্রসেসর দ্বারা পরিচালিত।
এই ফ্রেমওয়ার্ক একাধিক প্রসেসিং ইউনিটকে একীভূত করে, রিয়েল-টাইম ইমেজ বিশ্লেষণ, উন্নত গণনামূলক কাজ এবং হার্ডওয়্যার উপাদানগুলির মধ্যে বিরামহীন যোগাযোগ সমর্থন করে। এটি গবেষণা এবং উন্নয়ন অ্যাপ্লিকেশনগুলিতে জটিল অপারেশনগুলির দক্ষ পরিচালনা নিশ্চিত করে।
সফটওয়্যার ফ্রেমওয়ার্ক
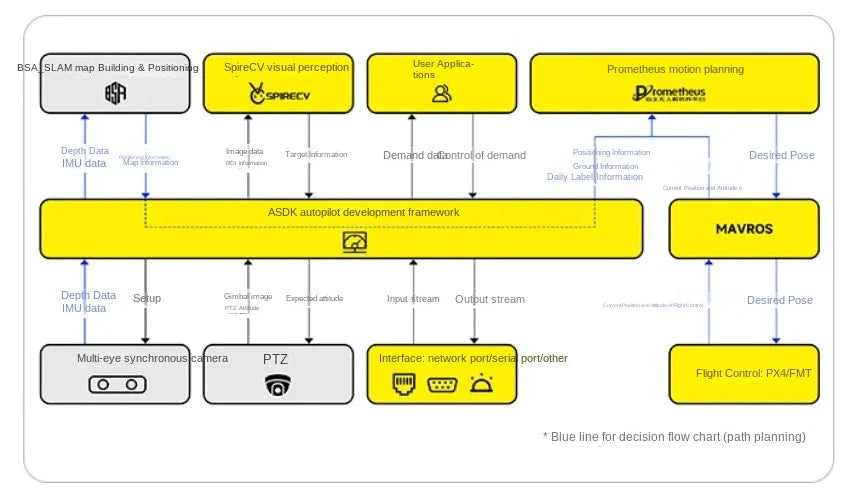
ডায়াগ্রামটি SU17 ড্রোনের সফ্টওয়্যার আর্কিটেকচারকে চিত্রিত করে, স্বায়ত্তশাসিত কার্যকারিতার জন্য বিভিন্ন সিস্টেমের একীকরণকে হাইলাইট করে:
-
BSA_SLAM (ম্যাপিং এবং স্থানীয়করণ):
- স্থানিক ম্যাপিং এবং পজিশনিং ডেটা প্রদান করে।
- সঠিক পরিবেশ উপলব্ধির জন্য গভীরতা এবং IMU সেন্সর ইনপুটগুলিকে একীভূত করে।
-
SpireCV দৃষ্টি উপলব্ধি:
- বস্তু সনাক্তকরণ, ROI তথ্য এবং লক্ষ্য ট্র্যাকিং সহ ভিজ্যুয়াল ডেটা প্রক্রিয়া করে।
-
ব্যবহারকারী অ্যাপ্লিকেশন:
- ব্যবহারকারী-চালিত কাজের জন্য ইন্টারফেস যেমন ডেটা ভিজ্যুয়ালাইজেশন এবং কমান্ড ইনপুট।
-
প্রমিথিউস মোশন প্ল্যানিং:
- অবস্থান, বেগ এবং লক্ষ্য ডেটা ব্যবহার করে ট্র্যাজেক্টরি পরিকল্পনা পরিচালনা করে।
-
ASDK স্বায়ত্তশাসিত ড্রাইভিং ফ্রেমওয়ার্ক:
- সেন্সর, ক্যামেরা, ক্লাউড মডিউল এবং বাহ্যিক ইন্টারফেসের মধ্যে ডেটা প্রবাহ পরিচালনা করে কেন্দ্রীয় প্রক্রিয়াকরণ স্তর হিসাবে কাজ করে।
- একাধিক ইনপুট/আউটপুট চ্যানেল সমর্থন করে (যেমন, নেটওয়ার্ক পোর্ট, সিরিয়াল পোর্ট)।
-
MAVROS:
- ফ্লাইট স্টেট এবং পজিশন কন্ট্রোলের জন্য ফ্লাইট কন্ট্রোল সিস্টেম (PX4/FMT) এর সাথে যোগাযোগ করে।
-
ক্লাউড মডিউল এবং মাল্টি-সিঙ্ক ক্যামেরা:
- উন্নত প্রক্রিয়াকরণের জন্য ক্লাউড-ভিত্তিক ডেটা সংহত করে।
- উচ্চ-নির্ভুল ক্রিয়াকলাপের জন্য ভিজ্যুয়াল ইনপুটগুলিকে সিঙ্ক্রোনাইজ করে।
নীল লাইন: ট্র্যাজেক্টরি পরিকল্পনার জন্য সিদ্ধান্ত নেওয়ার পথগুলিকে প্রতিনিধিত্ব করুন।
এই আর্কিটেকচারটি একটি মডুলার, এক্সটেনসিবল ডিজাইন প্রদর্শন করে, যা শক্তিশালী ড্রোন অপারেশনের জন্য বিভিন্ন হার্ডওয়্যার এবং সফ্টওয়্যার উপাদানগুলির মধ্যে বিরামহীন যোগাযোগ সক্ষম করে।
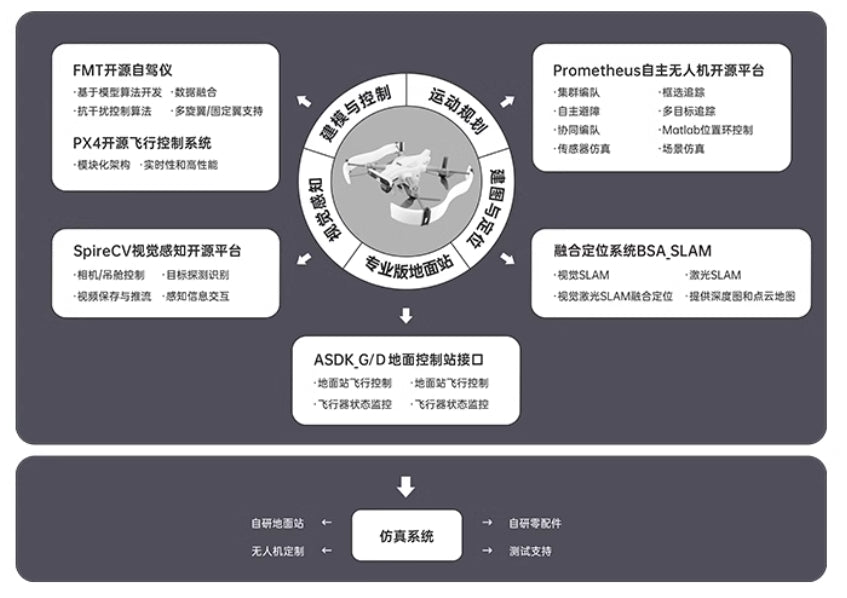
বুদ্ধিমান উন্মুক্ততা: ইন্টিগ্রেটেড UAV সিস্টেম সমাধান
চিত্রটি ড্রোন সিস্টেমের জন্য একটি ব্যাপক এবং উন্মুক্ত আর্কিটেকচার উপস্থাপন করে, বিভিন্ন উপাদান জুড়ে মডুলারিটি এবং একীকরণের উপর জোর দেয়:
-
মূল উপাদান:
- FMT ওপেন সোর্স অটোপাইলট: মডুলার উন্নয়নের উপর ভিত্তি করে নির্ভরযোগ্য ফ্লাইট নিয়ন্ত্রণ প্রদান করে, বিভিন্ন পরিবেশ এবং ডেটা ইন্টিগ্রেশন সমর্থন করে।
- PX4 ফ্লাইট কন্ট্রোল সিস্টেম: স্থিতিশীলতা নিশ্চিত করে এবং উন্নত মডুলার কাস্টমাইজেশন সমর্থন করে।
- SpireCV ভিশন উপলব্ধি প্ল্যাটফর্ম: অবজেক্ট সনাক্তকরণ, ট্র্যাকিং এবং রিয়েল-টাইম ভিডিও স্ট্রিমিং সহ চিত্র প্রক্রিয়াকরণের উপর ফোকাস করে।
-
মূল ফ্রেমওয়ার্ক:
- প্রমিথিউস স্বায়ত্তশাসিত UAV প্ল্যাটফর্ম: মাল্টি-ড্রোন নিয়ন্ত্রণ, গতি পরিকল্পনা, সহযোগী নেভিগেশন, এবং বাস্তব-বিশ্ব সিমুলেশন অন্তর্ভুক্ত।
- BSA_SLAM সিস্টেম: সুনির্দিষ্ট অবস্থান এবং ম্যাপিংয়ের জন্য দৃষ্টি-ভিত্তিক SLAM এবং LiDAR-ভিত্তিক SLAM একত্রিত করে৷
- ASDK G/D গ্রাউন্ড স্টেশন কন্ট্রোল ইন্টারফেস: পর্যবেক্ষণ এবং রিয়েল-টাইম সামঞ্জস্যের জন্য গ্রাউন্ড স্টেশন এবং UAV-এর মধ্যে বিরামহীন যোগাযোগ সক্ষম করে।
-
ওয়ার্কফ্লো ইন্টিগ্রেশন:
- গতি পরিকল্পনা, পরিবেশ ম্যাপিং এবং স্বায়ত্তশাসিত নেভিগেশনের মতো প্রক্রিয়াগুলি হাইলাইট করে।
- ট্র্যাজেক্টরি নিয়ন্ত্রণ, বাধা পরিহার এবং রিয়েল-টাইম ডেটা ব্যবস্থাপনার জন্য পেশাদার গ্রাউন্ড স্টেশনগুলির সাথে একীকরণ।
-
সিমুলেশন সাপোর্ট:
- স্বায়ত্তশাসিত মিশন পরীক্ষার জন্য একটি সিমুলেশন সিস্টেম অন্তর্ভুক্ত, UAV নিয়ন্ত্রণ, এবং উপাদান বৈধতা.
এই সিস্টেমটি স্বায়ত্তশাসিত UAV বিকাশের জন্য একটি অত্যাধুনিক সমাধান প্রদর্শন করে, বিভিন্ন পরিস্থিতিতে গবেষণা, প্রয়োগ এবং পরীক্ষার জন্য পরিমাপযোগ্য ক্ষমতা সহ।
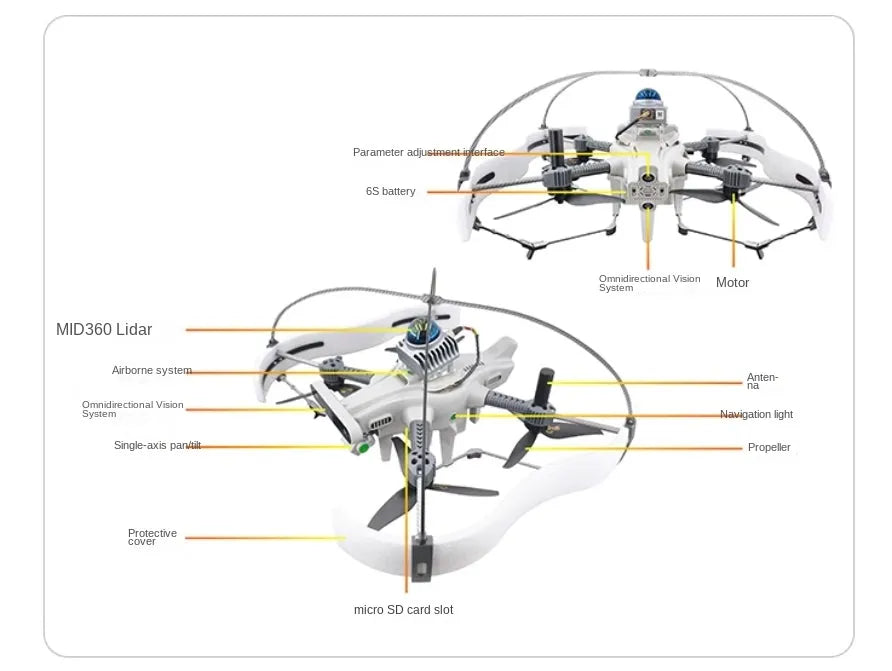
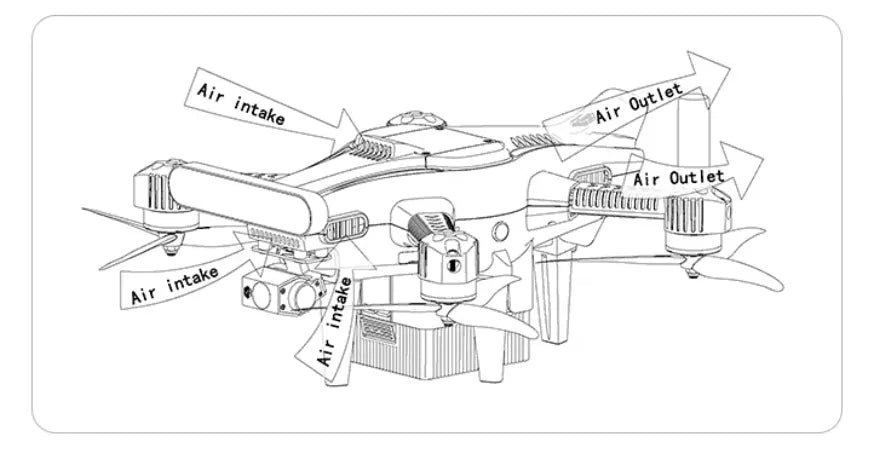
SU17 গবেষণা ড্রোনের কাঠামোগত উপাদান, এর স্থায়িত্ব এবং উন্নত নকশার উপর জোর দেয়। মূল বৈশিষ্ট্য অন্তর্ভুক্ত MID360 LiDAR সুনির্দিষ্ট ম্যাপিংয়ের জন্য, একটি সর্বমুখী দৃষ্টি ব্যবস্থা ব্যাপক পরিবেশগত উপলব্ধির জন্য, ক একক-অক্ষ গিম্বল স্থিতিশীল ইমেজিংয়ের জন্য, এবং একটি শক্তিশালী 6S ব্যাটারি বর্ধিত শক্তির জন্য। অন্যান্য অপরিহার্য উপাদান অন্তর্ভুক্ত প্রপেলার সিস্টেম, অ্যান্টেনা, নেভিগেশন লাইট, এবং ক মাইক্রো এসডি কার্ড স্লট তথ্য সংরক্ষণের জন্য। ডিজাইনটি অত্যাধুনিক হার্ডওয়্যারকে সংহত করে, বিভিন্ন গবেষণা অ্যাপ্লিকেশনের জন্য নির্ভরযোগ্যতা এবং উচ্চ কার্যকারিতা নিশ্চিত করে।
Related Collections