








WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, ২০০ Hz – ৬-অক্ষের অ্যাক্সেলোমিটার, জাইরোস্কোপ, ইনক্লিনোমিটার, ROS/Matlab
WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, ২০০ Hz – ৬-অক্ষের অ্যাক্সেলোমিটার, জাইরোস্কোপ, ইনক্লিনোমিটার, ROS/Matlab
WitMotion
পিকআপের উপলভ্যতা লোড করা যায়নি
Overview
WitMotion HWT601-AGV-485 হল একটি 6-অক্ষের অবস্থান/মুখাবয়ব সেন্সর যা AGV রোবট, ড্রোন এবং স্বায়ত্তশাসিত প্ল্যাটফর্মের জন্য ডিজাইন করা হয়েছে। এটি 3-অক্ষের ত্বরণ + 3-অক্ষের কোণীয় গতি একত্রিত করে এবং 3-অক্ষের কোণ &এবং কুয়ার্নিয়ন কে RS485 (Modbus) এর মাধ্যমে সর্বাধিক 200 Hz এ আউটপুট করে। মডিউলটিতে কালমান ডাইনামিক ফিল্টারিং, উচ্চ-নির্ভুল টার্নটেবিল ক্যালিব্রেশন, স্বয়ংক্রিয়/হাত দ্বারা বায়াস অধিগ্রহণ, শক্তি বন্ধ হলে মুখাবয়ব সংরক্ষণের জন্য ব্যাকআপ পাওয়ার, এবং একটি IP67 জলরোধী/ধূলিরোধী আবাস রয়েছে। এটি মাল্টি-লেভেল ক্যাসকেডিং (সর্বাধিক 32 ইউনিট) সমন্বিত অবস্থান পরিমাপের জন্য সমর্থন করে।
মূল বৈশিষ্ট্যসমূহ
-
উচ্চ-নির্ভুল কোণ: XY নির্ভুলতা 0.1°; Z নির্ভুলতা 0.1° (HWT601-AGV-485) / 0.15° (WT601-AGV-485).
-
স্থিতিশীল জাইরোস্কোপ বায়াস: XY 5°/ঘণ্টা; Z 2°/ঘণ্টা (HWT601-AGV-485) / 5°/ঘণ্টা (WT601-AGV-485).
-
প্রশস্ত ইনপুট 9–36 V, কার্যকরী বর্তমান ≈ 8 mA @12 V.
-
RS485 Modbus, বাউড 4,800–230,400 bps.
-
নমুনা: অনুরোধ–প্রতিক্রিয়া পড়া পর্যন্ত 200 Hz.
-
অ্যালগরিদম: কালমান ফিল্টার ফিউশন এবং নিবেদিত AGV হেডিং অ্যালগরিদম.
-
সফটওয়্যার: লাইভ ড্যাশবোর্ড, কার্ভ প্লট, 3D ভিজ্যুয়ালাইজেশন (গাড়ি/গোলক/ঘনক/বিমান), কনফিগারেশন (বায়াস, কোণ রেফ, অ্যাক্সেল ক্যালিব্রেশন, স্কেল ফ্যাক্টর), ডেটা রেকর্ডিং &এবং সরাসরি সংরক্ষণ, এবং Matlab আমদানি.
-
ডেভেলপার-বান্ধব: উদাহরণ প্রোগ্রাম এবং কোড সমর্থন ROS, Linux, C/C#, Python এর জন্য।
-
পরিবেশগত: IP67, -40~80 °C (-40~85 °C টেবিল ভেরিয়েন্ট দেখানো)।
-
ক্যাসকেডিং: একসাথে 32 সেন্সর RS485 এ একসাথে অবস্থান পরিমাপের জন্য।
স্থাপন নির্দেশিকা
-
সেন্সরটি একটি টাইট, সমতল, স্থিতিশীল পৃষ্ঠে মাউন্ট করুন; অসম ভিত্তি কোণ ত্রুটি সৃষ্টি করে (দেখুন FIG.1–2)।
-
সেন্সরের অক্ষকে পরিমাপিত অক্ষের সাথে সমান্তরাল রাখুন; আন্তঃঅক্ষ কোণ এড়িয়ে চলুন (দেখুন FIG.3–4)।
-
এই মডেলটি শুধুমাত্র অনুভূমিক স্থাপন সমর্থন করে।
সফটওয়্যার &এবং ভিজ্যুয়ালাইজেশন
-
শক্তিশালী ডেটা ড্যাশবোর্ড (কোণ, হার, ত্বরণ, চৌম্বক, কোয়ার্টারনিয়ন, পোর্ট, তাপমাত্রা, ভোল্টেজ, ইত্যাদি)।
-
কনফিগারেশন প্যানেল: বড রেট, ডিভাইস ঠিকানা, স্বয়ংক্রিয় বায়াস অধিগ্রহণ, Z-অক্ষ রিসেট, ত্বরণ ক্যালিব্রেশন, কোণ রেফারেন্স, ম্যানুয়াল পজিটিভ/নেগেটিভ ক্যালিব্রেশন এবং স্কেল ফ্যাক্টর।
-
3D মডেল স্বজ্ঞাত গতির পর্যবেক্ষণের জন্য এবং রিয়েল-টাইম কার্ভ গতিশীল আপডেট সহ।
-
রও-ডেটা ভিউ এবং সহজ সংগ্রহের জন্য ফাইল সংরক্ষণ; ম্যাটল্যাব বিশ্লেষণ আমদানি সমর্থিত।
-
ROS IMU INS ডেমো: মনোভাব ট্র্যাকিং ভিজ্যুয়ালাইজেশন এবং মনোভাব ডেটা প্রদর্শন (ইয়াও/রোল/পিচ, কোণীয় গতি, রৈখিক ত্বরণ)।
html
স্পেসিফিকেশন
ইন্টারফেস &এবং পারফরম্যান্স
| আইটেম | HWT601-AGV-485 | WT601-AGV-485 |
|---|---|---|
| ইন্টারফেস / প্রোটোকল | RS485 / Modbus | RS485 / Modbus |
| বড রেট | 4,800–230,400 bps | 4,800–230,400 bps |
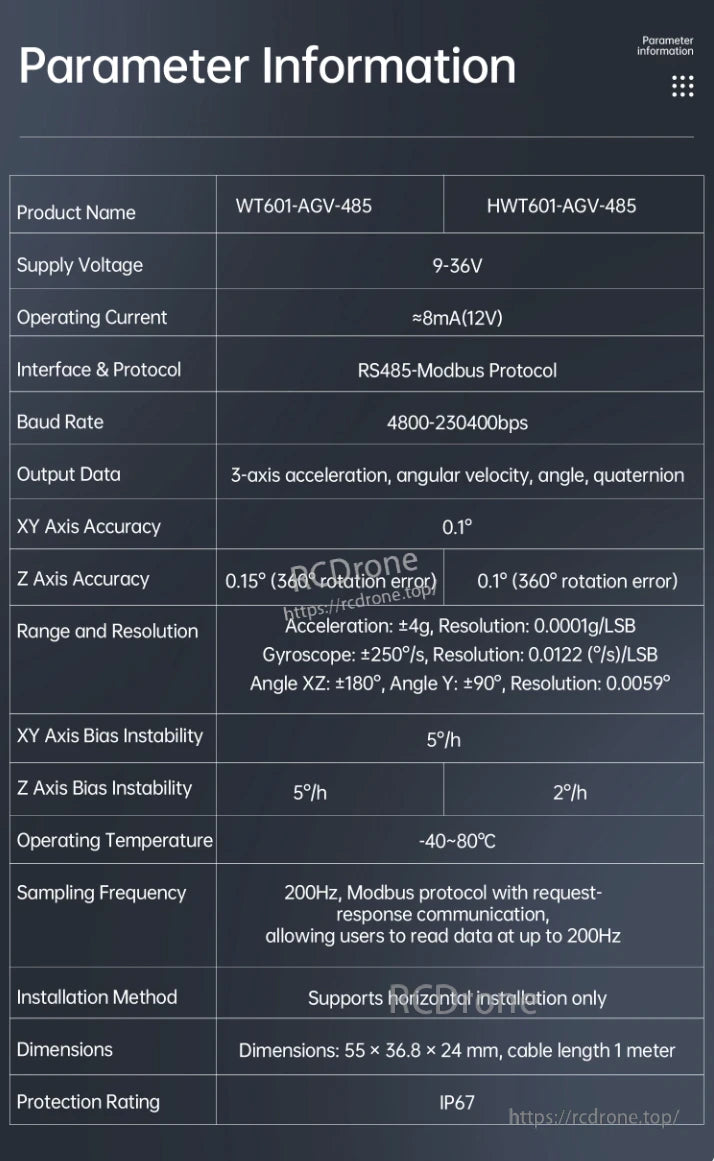
| আউটপুট ডেটা | 3-অক্ষ অ্যাক্সেলেশন, কোণীয় গতি, কোণ, কোয়ার্টারনিয়ন | একই |
| স্যাম্পলিং ফ্রিকোয়েন্সি | ২০০ Hz পর্যন্ত (অনুরোধ–প্রতিক্রিয়া) | ২০০ Hz পর্যন্ত |
| XY কোণ সঠিকতা | 0.1° | 0. 1° |
| Z কোণ সঠিকতা (360° ঘূর্ণন ত্রুটি) | 0.1° | 0.15° |
| অ্যাক্সেল পরিসর / রেজোলিউশন | ±4 g / 0.0001 g/LSB | একই |
| জাইরো পরিসর / রেজোলিউশন | ±250 °/s / 0.0122 (°/s)/LSB | একই |
| কোণ পরিসর / রেজোলিউশন | XZ: ±180°; Y: ±90° / 0.0059° | একই |
| জাইরো বায়াস অস্থিতিশীলতা (XY / Z) | 5°/ঘণ্টা / 2°/ঘণ্টা | 5°/ঘণ্টা / 5°/ঘণ্টা |
| তাপমাত্রা সহগ (XYZ) | 0.002°/°C | 0.002°/°C |
ইলেকট্রিক্যাল, মেকানিক্যাল &এন্ড পরিবেশ
-
সরবরাহ ভোল্টেজ: 9–36 V; অপারেটিং কারেন্ট: ≈ 8 mA (12 V)
-
আকার: 55 × 36.8 × 24 mm; কেবলের দৈর্ঘ্য: 1 মিটার
-
রক্ষা: IP67
-
কার্যকরী তাপমাত্রা: -40~80 °C (টেবিলের ভেরিয়েন্টে -40~85 °Cও দেখানো হয়েছে)
-
স্থাপন: শুধুমাত্র অনুভূমিক মাউন্টিং
-
ক্যাসকেডিং: 32 ইউনিট পর্যন্ত RS485-এ
অ্যাপ্লিকেশন এলাকা
AGV/AMR এবং মোবাইল রোবট, ড্রোন/UAV, অমানবিক লজিস্টিক যানবাহন, এবং স্বায়ত্তশাসিত ড্রাইভিং পারসেপশন মডিউল।
মডেল নামকরণ &এবং নির্বাচন
-
HWT601-AGV-485 – উচ্চতর Z-অক্ষ সঠিকতা (0.1°) এবং নিম্ন Z-বায়াস অস্থিতিশীলতা (2°/ঘণ্টা)।
-
WT601-AGV-485 – মানক Z-অক্ষ স্পেসিফিকেশন (0.15°, 5°/ঘণ্টা).
যখন Z-হেডিং সঠিকতা গুরুত্বপূর্ণ, তখন HWT601 নির্বাচন করুন।
বিস্তারিত

উচ্চ-সঠিক 6-অক্ষ অবস্থান সেন্সর 3-অক্ষ ত্বরণ, কোণীয় গতি, কোণ এবং কোয়ার্নিয়ন সহ। AGV হেডিং অ্যালগরিদম, IP67 সুরক্ষা, কালমান ফিল্টারিং, স্বয়ংক্রিয় পক্ষপাত অধিগ্রহণ এবং PC সফটওয়্যার সমর্থন বৈশিষ্ট্য।
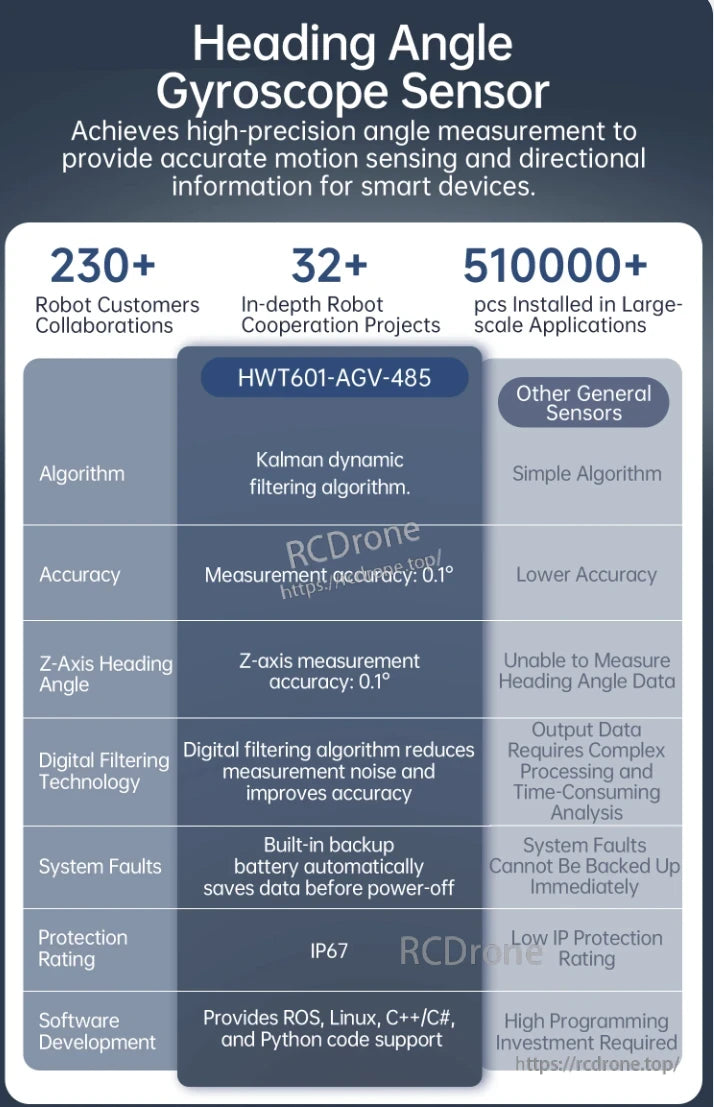
হেডিং অ্যাঙ্গেল জাইরোস্কোপ সেন্সর HWT601-AGV-485 উচ্চ-সঠিক কোণ পরিমাপ প্রদান করে কালমান ফিল্টারিং, 0.1° সঠিকতা, ডিজিটাল শব্দ হ্রাস, IP67 সুরক্ষা এবং ROS, Linux, C++, এবং Python সমর্থন করে। 230 টিরও বেশি রোবট সহযোগিতা এবং 510,000+ ইনস্টলেশন।
HWT601-AGV-485 IMU 9-36V সরবরাহ, RS485-Modbus, 200Hz স্যাম্পলিং, ±4g ত্বরণ, ±250°/s জাইরোস্কোপ, IP67 রেটিং, -40~80°C অপারেশন অফার করে। এটি সঠিক, উচ্চ-রেজোলিউশনের 3-অক্ষের ডেটা প্রদান করে।
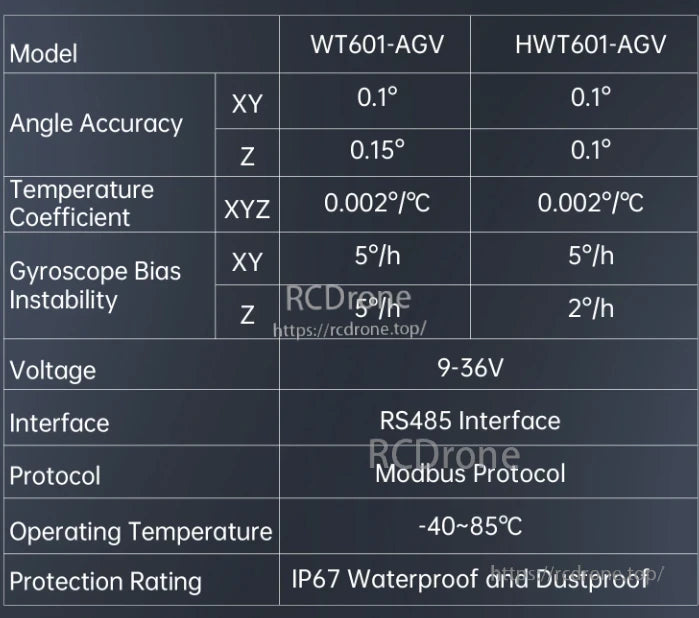
HWT601-AGV IMU XY এবং Z অক্ষের জন্য 0.1° কোণ সঠিকতা এবং XYZ জুড়ে 0.002°/°C তাপমাত্রা সহগ অফার করে। জাইরোস্কোপ বায়াস অস্থিতিশীলতা 5°/ঘণ্টা (XY) এবং 2°/ঘণ্টা (Z)। এটি 9–36V এ কাজ করে, RS485 ব্যবহার করে Modbus সহ, এবং -40 থেকে 85°C পর্যন্ত কার্যকরী। IP67 রেটেড, এটি জলরোধী এবং ধূলিরোধী সুরক্ষা প্রদান করে। WT601-AGV ভেরিয়েন্টের অনুরূপ স্পেসিফিকেশন রয়েছে তবে 0.15° Z-অক্ষের সঠিকতা এবং 5°/ঘণ্টা Z-অক্ষের বায়াস অস্থিতিশীলতা রয়েছে। উভয় মডেলই চাহিদাপূর্ণ পরিবেশে নির্ভরযোগ্য কর্মক্ষমতা নিশ্চিত করে।
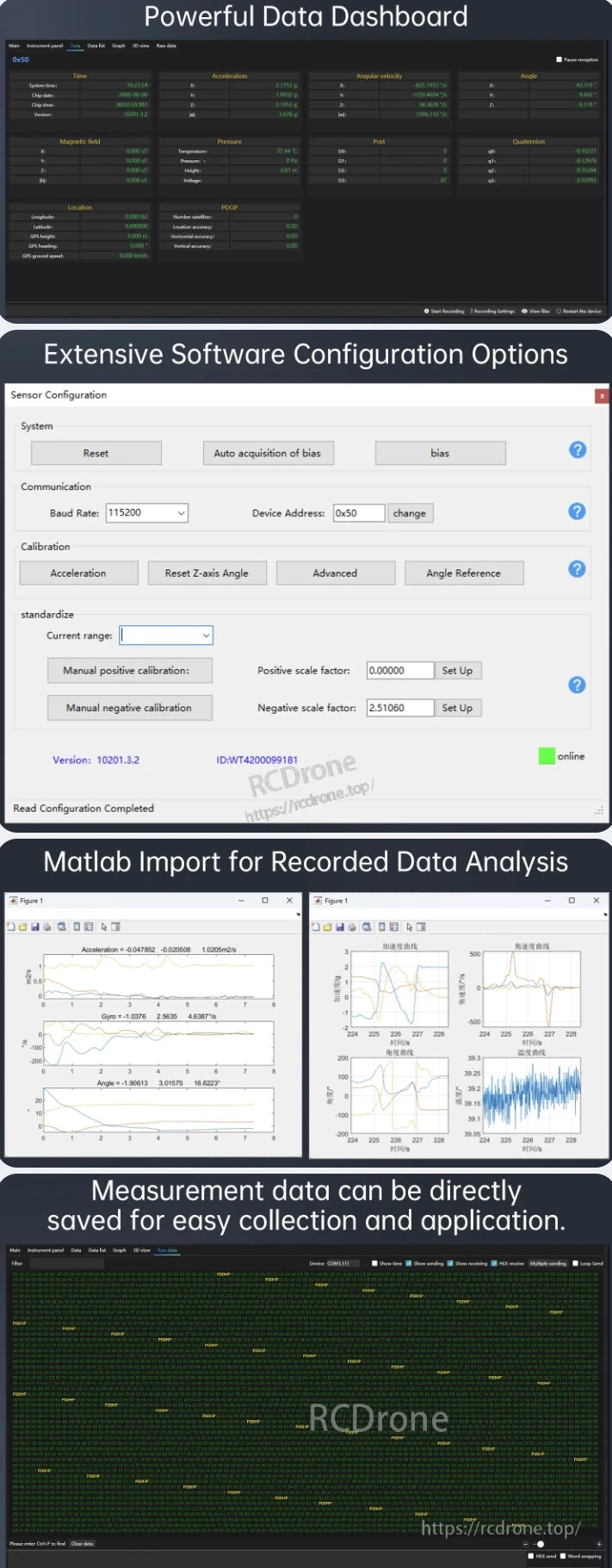
শক্তিশালী ডেটা ড্যাশবোর্ড যা বাস্তব-সময়ের সেন্সর পড়া, ব্যাপক সফটওয়্যার কনফিগারেশন, বিশ্লেষণের জন্য MATLAB আমদানি, এবং সহজ সংগ্রহ এবং প্রয়োগের জন্য সরাসরি ডেটা সংরক্ষণ করে।
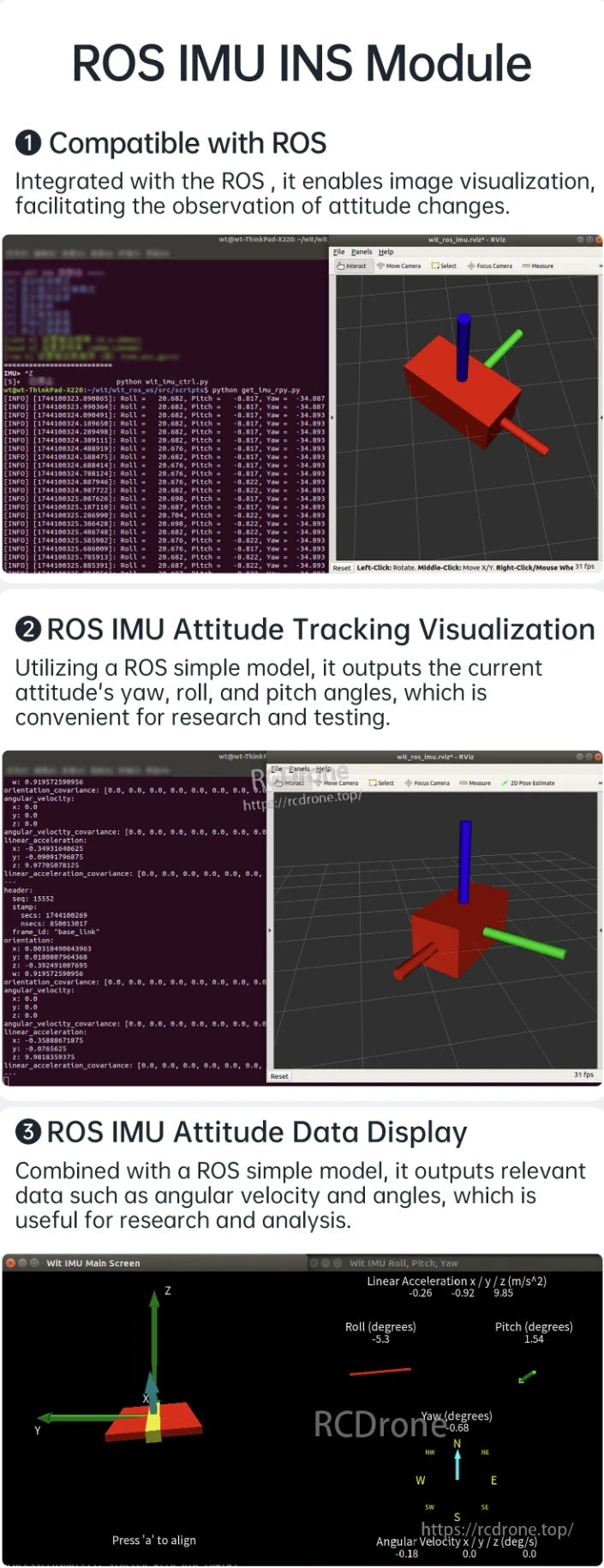
ROS IMU INS মডিউল ROS সামঞ্জস্য প্রদান করে, মনোভাব ট্র্যাকিং ভিজুয়ালাইজ করে এবং গবেষণা ও বিশ্লেষণের জন্য বাস্তব সময়ের রোল, পিচ, ইয়াও, কোণীয় গতি এবং লিনিয়ার ত্বরণ প্রদর্শন করে।
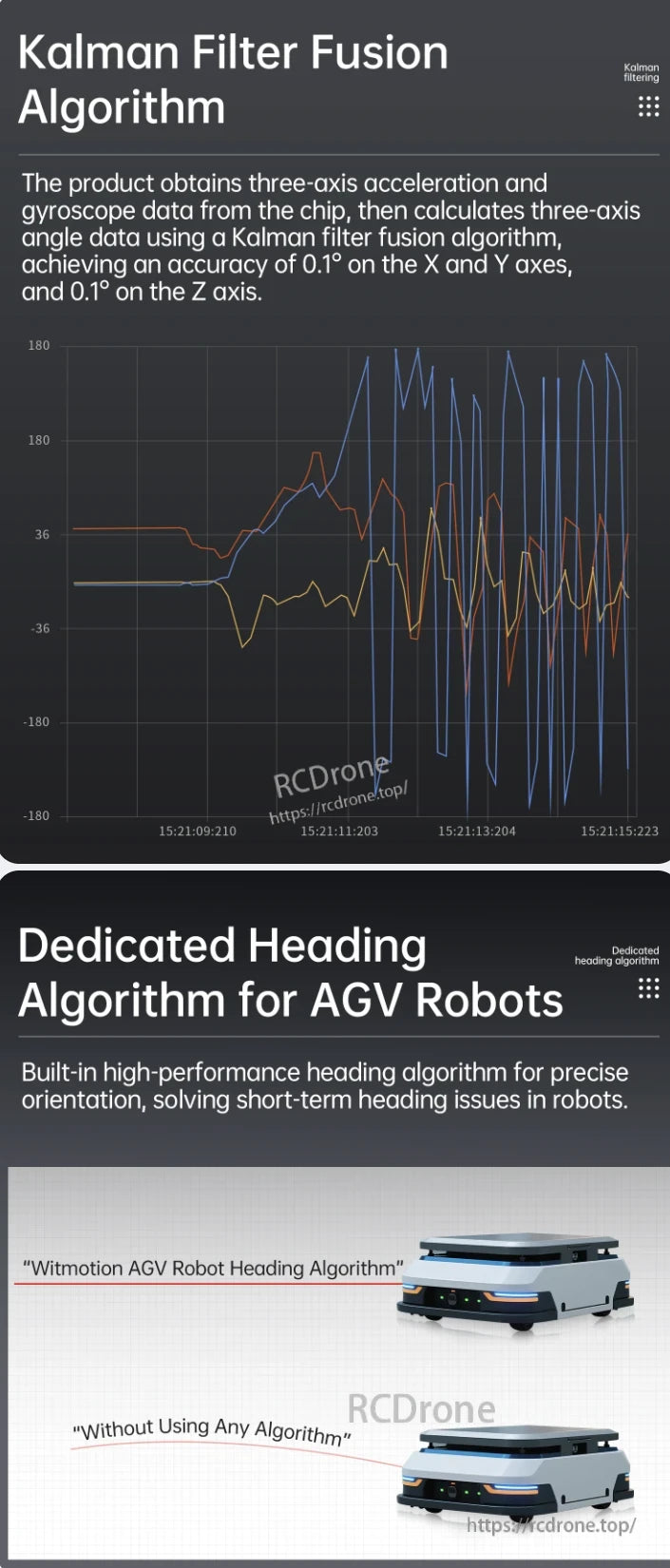
WitMotion HWT601 AGV IMU 0.1° সঠিকতার সাথে 3-অক্ষের কোণ তথ্য প্রদান করে ক্যালম্যান ফিল্টার ফিউশন ব্যবহার করে। এর নিবেদিত হেডিং অ্যালগরিদম স্থিতিশীল রোবট অরিয়েন্টেশন নিশ্চিত করে, যা এমন সিস্টেমগুলির তুলনায় কার্যকারিতা উল্লেখযোগ্যভাবে বাড়ায় যাদের এমন অ্যালগরিদম নেই।
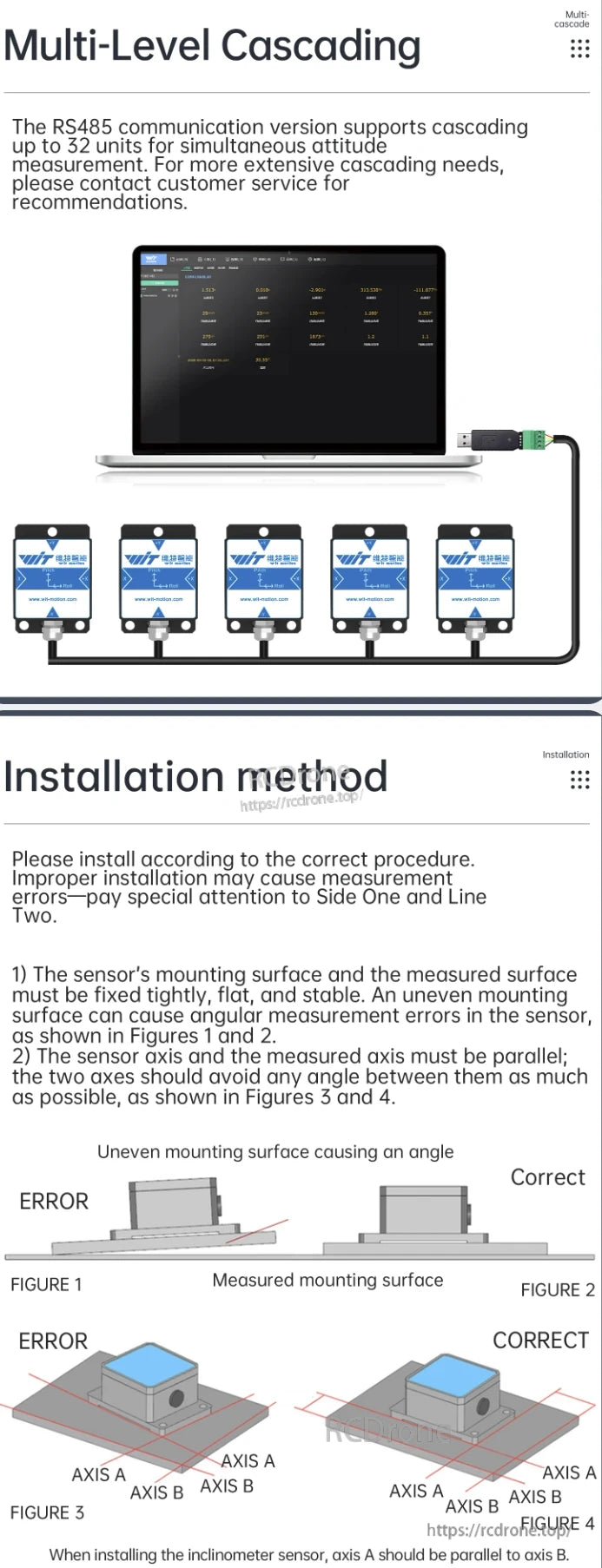
WitMotion HWT601 AGV IMU RS485 এর মাধ্যমে মনোভাব পরিমাপের জন্য 32টি ক্যাসকেডিং ইউনিট পর্যন্ত সমর্থন করে। সঠিকতার জন্য সমতল, স্থিতিশীল মাউন্টিং এবং সঠিকভাবে সাজানো অক্ষ নিশ্চিত করুন।
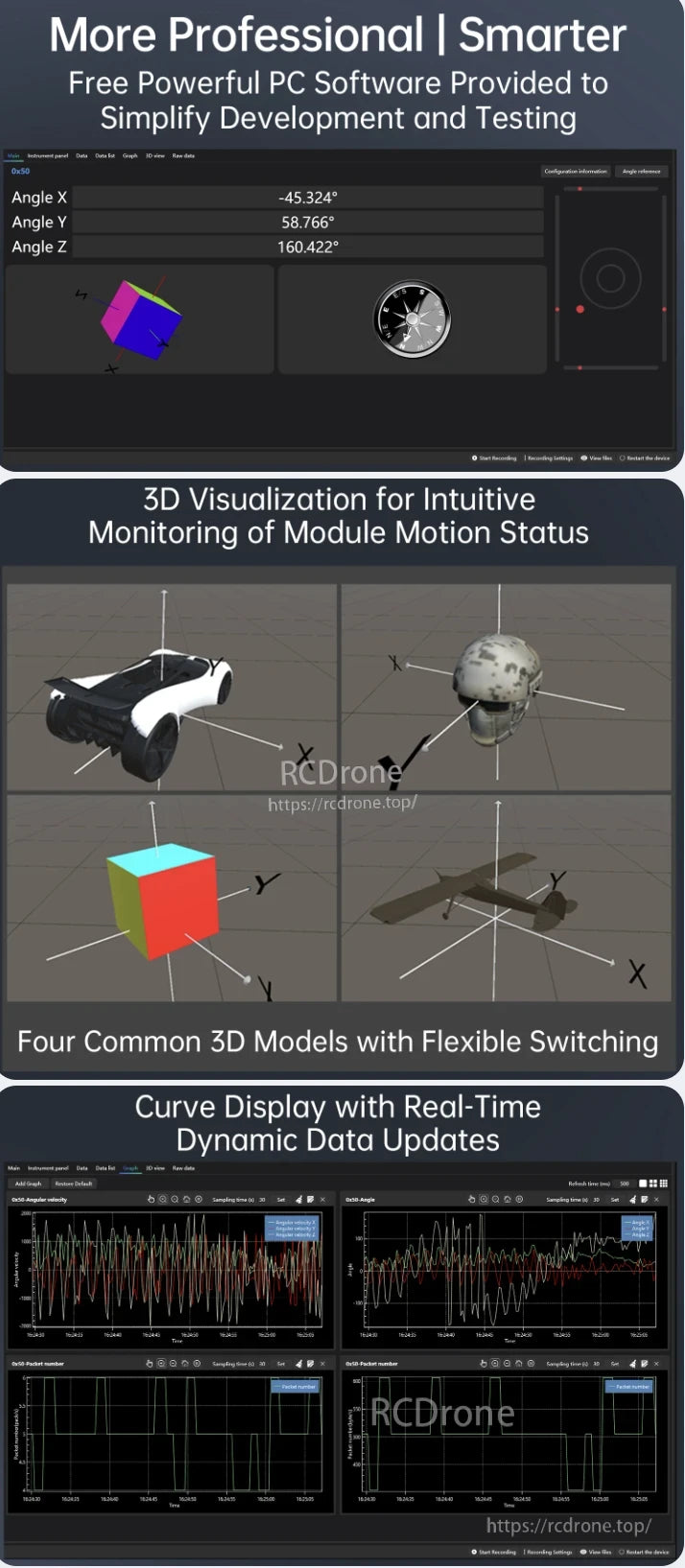
WitMotion HWT601 AGV IMU এর জন্য পেশাদার PC সফটওয়্যার বাস্তব সময়ের 3D ভিজুয়ালাইজেশন, কোণ পর্যবেক্ষণ এবং গতিশীল বক্ররেখা প্রদর্শন অফার করে।বৈশিষ্ট্যগুলির মধ্যে অন্তর্ভুক্ত রয়েছে স্বজ্ঞাত মোশন ট্র্যাকিং, নমনীয় মডেল পরিবর্তন, এবং কার্যকর উন্নয়ন ও পরীক্ষার জন্য লাইভ ডেটা আপডেট।
সমর্থনকারী ডকুমেন্টেশনে STM32, Arduino, 51 UART, Windows C++, এবং Matlab এর জন্য উদাহরণ প্রোগ্রাম অন্তর্ভুক্ত রয়েছে যা ডেভেলপারদের টিউটোরিয়াল এবং কোড নমুনা ব্যবহার করে পণ্যটি প্রয়োগ করতে সহায়তা করে।
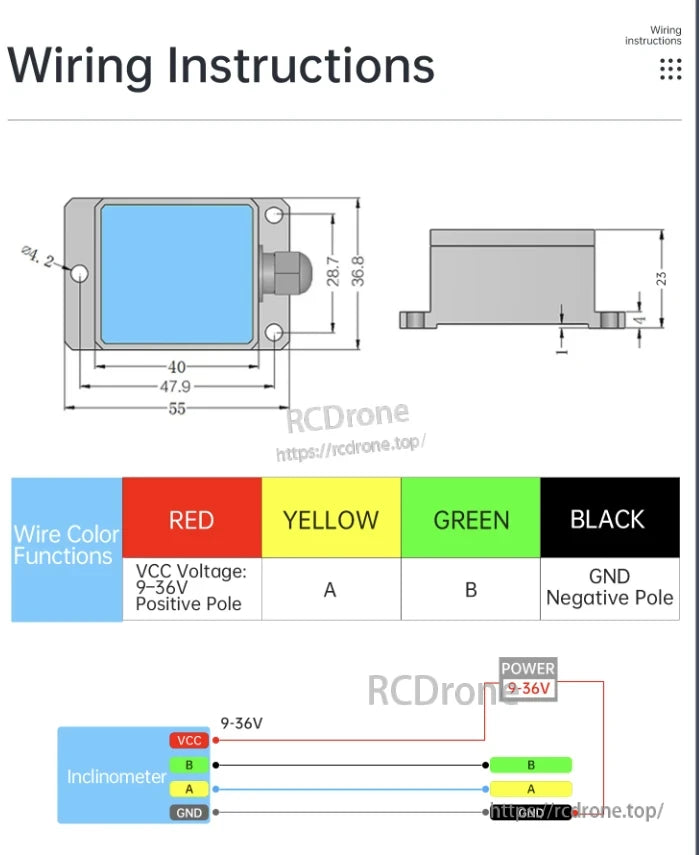
WitMotion HWT601 AGV IMU তারের নির্দেশিকা: লাল (9-36V), হলুদ (A), সবুজ (B), কালো (GND)। মাত্রা এবং সংযোগের ডায়াগ্রাম প্রদান করা হয়েছে।

WitMotion HWT601 AGV IMU ড্রোন, স্বায়ত্তশাসিত ড্রাইভিং, মোবাইল রোবট, এবং অমানবিক লজিস্টিক যানবাহনের জন্য।
Related Collections








