












WitMotion WT901C-485 ৯-অক্ষ IMU অ্যাক্সেলোমিটার জাইরোস্কোপ ডিজিটাল কম্পাস (RS485/RS232/TTL), ০.০৫° কোণ নির্ভুলতা, ০.২–২০০ Hz AHRS
WitMotion WT901C-485 ৯-অক্ষ IMU অ্যাক্সেলোমিটার জাইরোস্কোপ ডিজিটাল কম্পাস (RS485/RS232/TTL), ০.০৫° কোণ নির্ভুলতা, ০.২–২০০ Hz AHRS
RCDrone
পিকআপের উপলভ্যতা লোড করা যায়নি
Overview
WitMotion WT901C-485 একটি কম্প্যাক্ট 9-অক্ষ AHRS IMU যা একটি ত্রিআক্ষীয় MPU9250-ক্লাস সেন্সর স্যুট (অ্যাক্সিলারোমিটার + জাইরোস্কোপ + ম্যাগনেটোমিটার) এবং WitMotion-এর ফিউশন/কালমান অ্যালগরিদমের উপর ভিত্তি করে। এটি কোণ, ত্বরণ, কোণীয় গতি, চৌম্বক ক্ষেত্র, এবং কোয়ার্টার্নিয়ন আউটপুট প্রদান করে XY স্থির নির্ভুলতা 0.05° (গতিশীল 0.1°) এবং 0.2–200 Hz সামঞ্জস্যযোগ্য আপডেট হার। একাধিক শারীরিক ইন্টারফেস (RS485/RS232 Modbus &এবং TTL UART) এবং বিস্তৃত ইনপুট পরিসীমা WT901C-485 কে Arduino/STM32/MCUs, PCs, এবং শিল্প নিয়ন্ত্রকদের সাথে সংহত করা সহজ করে। অফিসিয়াল উইন্ডোজ সফটওয়্যার (MiniIMU.exe) বাস্তব সময়ের গ্রাফ, 3D ডেমো, ডেটা লগিং/রপ্তানি, এবং ভিজ্যুয়াল চৌম্বক ক্যালিব্রেশন প্রদান করে।
মূল বৈশিষ্ট্যসমূহ
-
9-অক্ষ আউটপুট: কোণ (রোল/পিচ/ইয়াও), 3-অক্ষ অ্যাক্সেল/জাইরো/ম্যাগ, কোয়ার্টার্নিয়ন।
-
উচ্চ স্থিতিশীলতা &এবং সঠিকতা: XY 0.05° স্থির, 0.1° গতিশীল; ত্বরণ স্থিতিশীলতা 0.01 g.
-
লচনীয় I/O: TTL / RS232 / RS485 (Modbus); baud 4,800–230,400 (ডিফল্ট 9,600)।
-
সমন্বয়যোগ্য হার: 0.2–200 Hz (ডিফল্ট 10 Hz)।
-
বিস্তৃত সরবরাহ: TTL 3.3–5 V, RS232/RS485 5–36 V; <25 mA সাধারণ।
-
টুলিং &এবং SDKs: Windows অ্যাপ, Android অ্যাপ, CH340/CP2102 ড্রাইভার, C/C++/STM32/Arduino/Matlab এর জন্য নমুনা কোড।
-
চৌম্বক ক্যালিব্রেশন &এবং 3D ডেমো প্রথমবারের সেটআপের জন্য; লাইভ প্লট এবং TXT রপ্তানি।
-
শিল্প নকশা: –40~85 °C, 51×36×15 মিমি, উল্লম্ব বা অনুভূমিক মাউন্টিং।
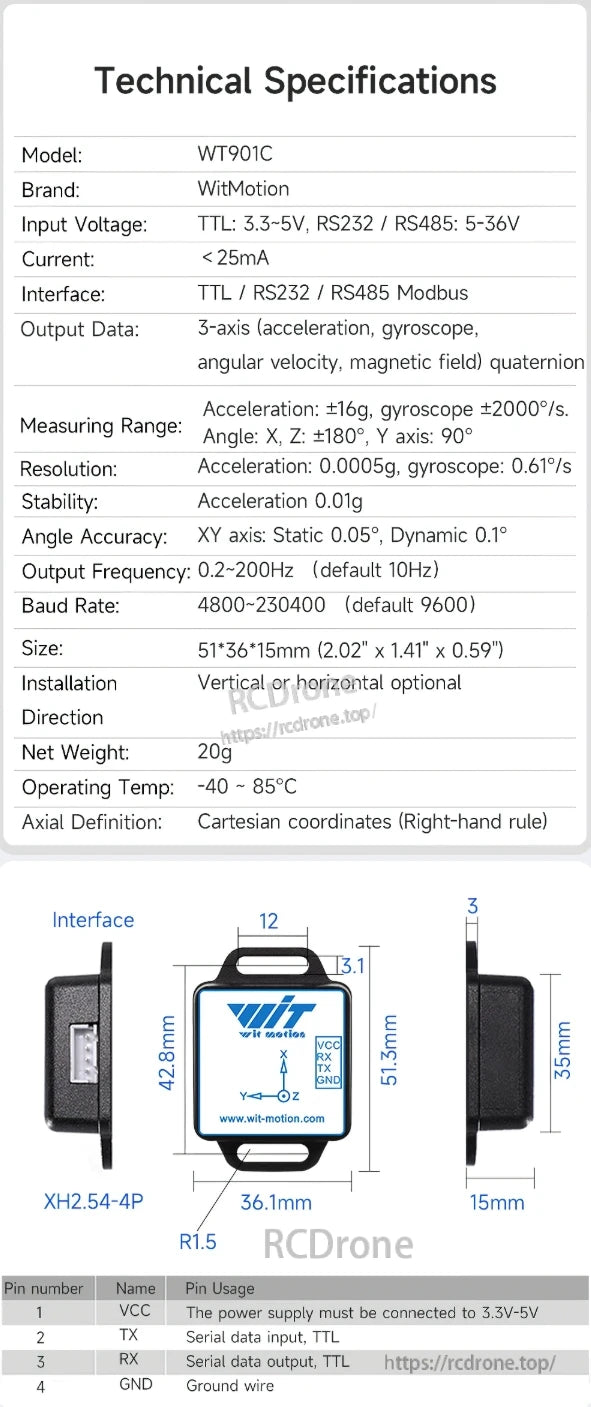
প্রযুক্তিগত স্পেসিফিকেশন
| আইটেম | স্পেসিফিকেশন |
|---|---|
| মডেল | WT901C (WT901C-485 ভেরিয়েন্ট) |
| ইন্টারফেস | TTL / RS232 / RS485 (Modbus) |
| ইনপুট ভোল্টেজ | TTL: 3.3–5 V; RS232/RS485: 5–36 V |
| বর্তমান | < 25 mA |
| আউটপুট ডেটা | অ্যাক্সিলারেশন, কোণগত গতি, চৌম্বক ক্ষেত্র, কোণ, কোয়ার্টার্নিয়ন |
| মাপের পরিসীমা | অ্যাক্সিলারেশন ±16 g, জাইরো ±2000 °/s; কোণ: X,Z ±180°, Y 90° |
| রেজোলিউশন | অ্যাক্সিলারেশন 0.0005 g, জাইরো 0.61 °/s |
| স্থিতিশীলতা | অ্যাক্সিলারেশন 0.01 g |
| কোণের সঠিকতা | XY স্থির 0.05°, গতিশীল 0.1° |
| আউটপুট ফ্রিকোয়েন্সি | 0.2–200 Hz (ডিফল্ট 10 Hz) |
| বোড রেট | 4,800–230,400 (ডিফল্ট 9,600) |
| আকার / ওজন | 51×36×15 মিমি, 20 গ্রাম |
| অপারেটিং তাপমাত্রা | –40 ~ 85 °C |
| অক্ষ | কার্টেসিয়ান, ডান হাতের নিয়ম |
| ইনস্টলেশন | উল্লম্ব বা অনুভূমিক |
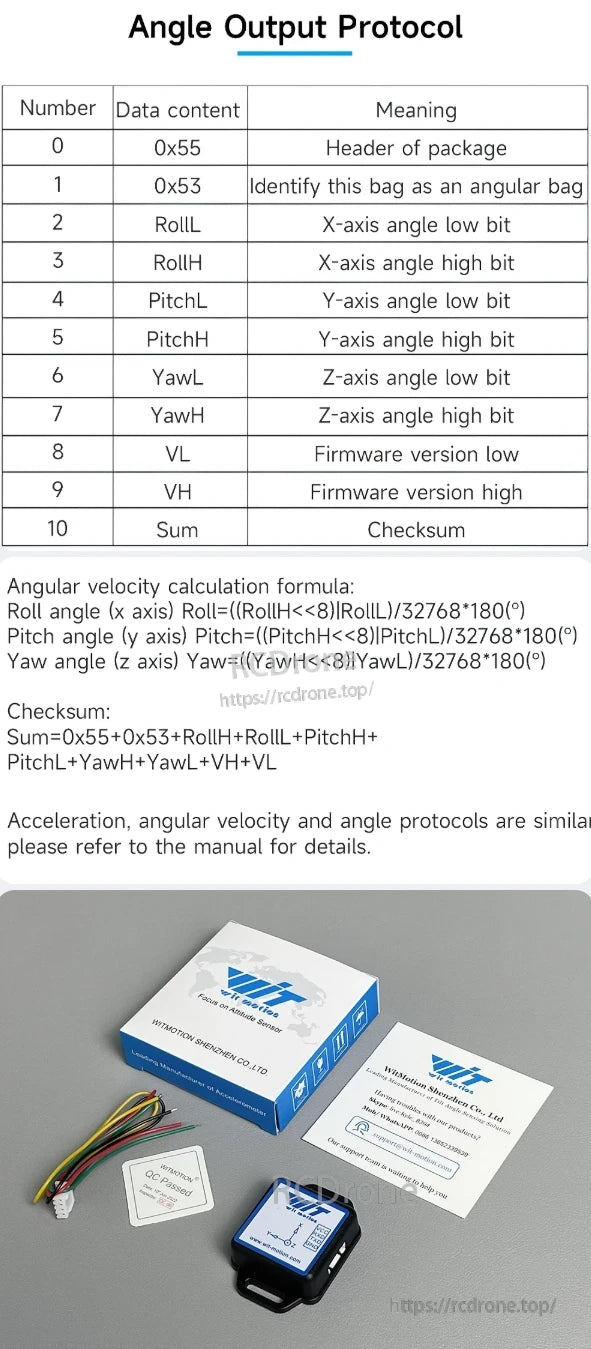
এঙ্গেল ফ্রেম (0x55 0x53) – আউটপুট প্রোটোকল
| বাইট সূচক | বিষয়বস্তু | অর্থ |
|---|---|---|
| 0 | 0x55 | প্যাকেট হেডার |
| 1 | 0x53 | “এঙ্গেল” ফ্রেম ID |
| 2–3 | রোলL/রোলH | X-axis angle (low/high) |
| ৪–৫ | PitchL/PitchH | Y-axis angle (low/high) |
| ৬–৭ | YawL/YawH | Z-axis angle (low/high) |
| ৮ | VL | Firmware version low |
| ৯ | VH | Firmware version high |
| ১০ | Sum | Checksum |
Angle decoding
Roll (°) = ((RollH << ৮) | RollL) / 32768 × 180
Pitch (°) = ((PitchH << ৮) | PitchL) / 32768 × 180
Yaw (°) = ((YawH << ৮) | YawL) / 32768 × 180
চেকসাম
সাম = 0x55 + 0x53 + রোলএল + রোলএইচ + পিচএল + পিচএইচ + ইয়াওএল + ইয়াওএইচ + ভিএল + ভিএইচ।
(অ্যাক্সিলারেশন এবং কোণগত-গতি ফ্রেম একই বিন্যাস শৈলী অনুসরণ করে—ম্যানুয়াল দেখুন।)
মাত্রা &এবং সংযোগকারী
এনক্লোজার আকার: 51 × 36 × 15 মিমি (এইচ × ডাব্লিউ × ডি), মাউন্টিং কান্ডল সহ; ওজন ≈ 20 গ্রাম।
সংযোগকারী: XH2.54-4P (সেন্সরে বোর্ড হেডার)।
পিনআউট (TTL সংস্করণ)
| পিন | নাম | বর্ণনা |
|---|---|---|
| 1 | VCC | শক্তি ইনপুট 3.3–5 V |
| 2 | TX | সিরিয়াল ডেটা ইনপুট, TTL স্তর |
| 3 | RX | সিরিয়াল ডেটা আউটপুট, TTL স্তর |
| 4 | GND | গ্রাউন্ড |
নোট: সরাসরি MCU ইন্টিগ্রেশনের জন্য TTL স্তর ব্যবহার করুন। RS232/RS485 ভেরিয়েন্ট তাদের নিজস্ব ভোল্টেজ স্তর এবং ওয়্যারিং স্ট্যান্ডার্ড ব্যবহার করে।
সফটওয়্যার &এবং টুলস
-
MiniIMU.exe (Windows): কনফিগারেশন (অ্যালগরিদম, ইনস্টল নির্দেশনা, পরিসীমা, ব্যান্ডউইথ), রিয়েল-টাইম গ্রাফ, রো/হেক্স ভিউ, ডেটা রেকর্ডিং এবং TXT এক্সপোর্ট।
-
3D ডেমো: বাস্তব সময়ে অরিয়েন্টেশন ভিজুয়ালাইজ করুন (সোর্স উপলব্ধ)।
-
ভিজ্যুয়াল ম্যাগনেটিক ক্যালিব্রেশন: বায়াস অপসারণের জন্য এলিপস-ফিট উইজার্ড (প্রথম ব্যবহারের জন্য সুপারিশকৃত)।
-
ড্রাইভার &এন্ড কোড: CH340/CP2102 ড্রাইভার; STM32, Arduino, C/C++, Matlab এর উদাহরণ; অ্যান্ড্রয়েড অ্যাপ; পিসি/ফোন ডেমো ভিডিও।
সাধারণ অ্যাপ্লিকেশন
অটোমেশন এবং রোবোটিক্স, লেভেলিং প্ল্যাটফর্ম, টিল্ট-এঙ্গেল মনিটরিং, ভাইব্রেশন মনিটরিং, ভোক্তা ইলেকট্রনিক্স, IoT সিস্টেম ইন্টিগ্রেশন, শিল্প পরীক্ষণ, VR/AR হেডসেট।
বিস্তারিত

খরচ-কার্যকর AHRS IMU যা X Y অক্ষের মধ্যে 0.05° সঠিকতা প্রদান করে। এতে উইটমোশন ফিউশন অ্যালগরিদম ব্যবহার করে inclinatiion, vibration, attitude সেন্সিং এর বৈশিষ্ট্য রয়েছে। এতে acceleration, gyroscope, angle, magnetic, Kalman filtering, এবং quaternion ফাংশন অন্তর্ভুক্ত রয়েছে।
WitMotion WT901C IMU সেন্সর 3-অক্ষের ত্বরণ, জাইরোস্কোপ, কোণগত গতি এবং চৌম্বক ক্ষেত্রের সংবেদন প্রদান করে। এটি TTL/RS232/RS485 ইন্টারফেস সমর্থন করে, ±16g ত্বরণের পরিসীমা, ±2000°/s জাইরো, 0.05° স্থির কোণ সঠিকতা রয়েছে এবং -40°C থেকে 85°C এর মধ্যে কাজ করে।

WitMotion WT901C IMU সেন্সর স্বয়ংক্রিয়তা, VR হেডসেট, স্তর নির্ধারণ এবং কম্পন পর্যবেক্ষণ প্রদান করে। এর ব্যবহারিক ক্ষেত্রগুলির মধ্যে ভোক্তা ইলেকট্রনিক্স, IoT ইন্টিগ্রেশন, শিল্প পরীক্ষণ এবং AR/VR অন্তর্ভুক্ত। বিনামূল্যে সফটওয়্যার ব্যবহারকারী-বান্ধব মনোভাব পরিমাপের সাথে বাস্তব সময়ের কোণ তথ্য প্রদান করে।
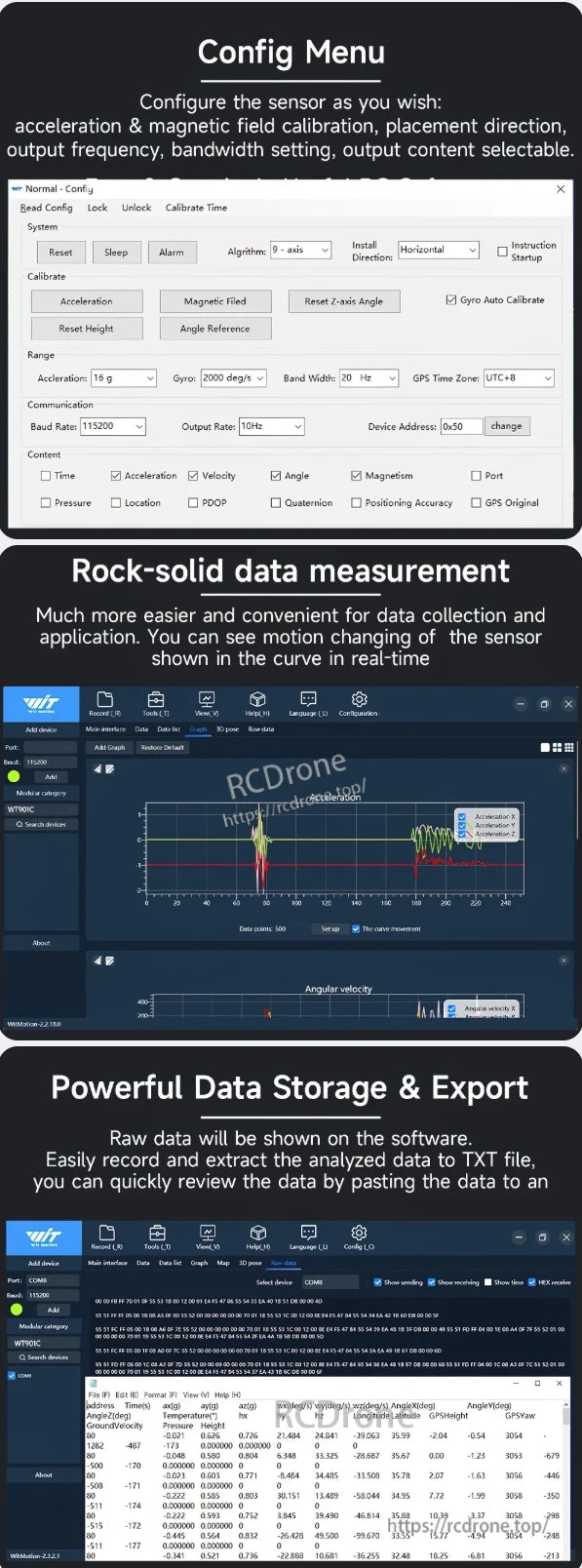
WitMotion WT901C IMU সেন্সর ত্বরণ, চৌম্বক ক্ষেত্র এবং দিকনির্দেশনার জন্য কনফিগারযোগ্য সেটিংস অফার করে। এটি বাস্তব সময়ের তথ্য ভিজ্যুয়ালাইজেশন, শক্তিশালী পরিমাপ প্রদান করে এবং বিশ্লেষণের জন্য TXT ফরম্যাটে তথ্য সংরক্ষণ/রপ্তানির সমর্থন করে।
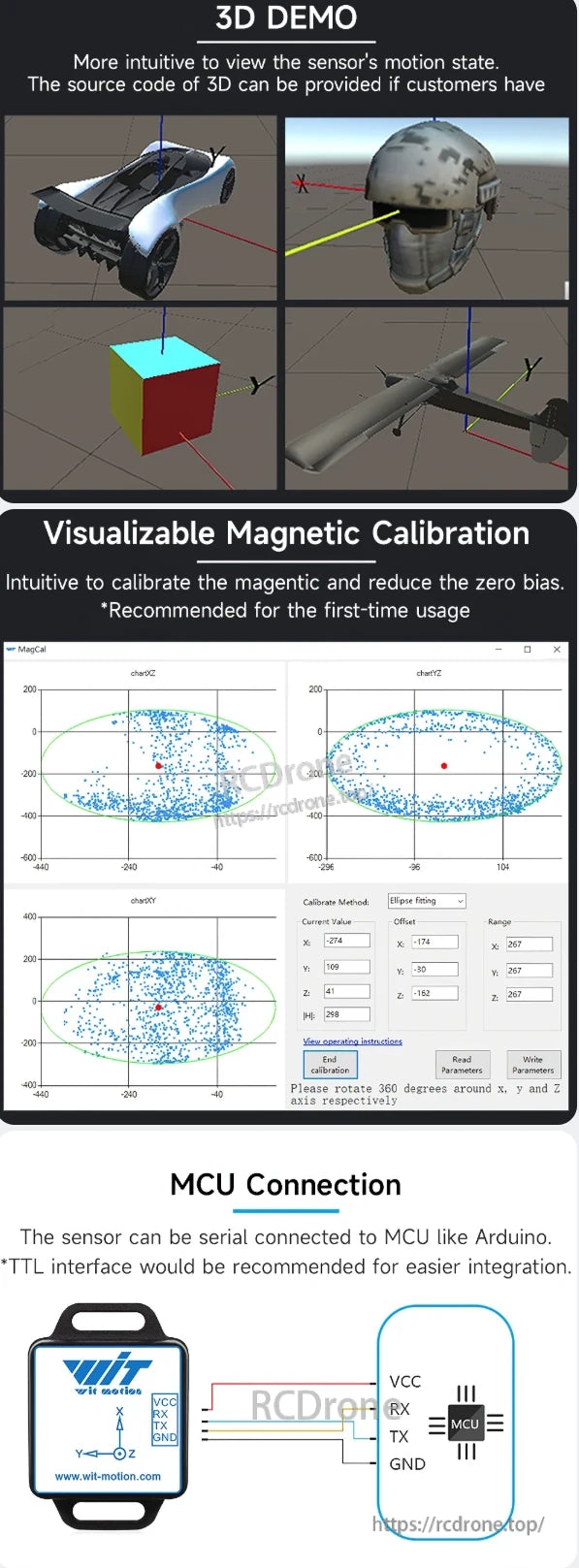
3D ডেমো সেন্সর গতিকে গাড়ি, হেলমেট, ঘনক এবং ড্রোন মডেলের সাথে চিত্রিত করে। চৌম্বক ক্যালিব্রেশন ইন্টারফেস স্বজ্ঞাত সমন্বয়ের অনুমতি দেয়। MCU সংযোগের বিস্তারিত তথ্য TTL ইন্টারফেসের বৈশিষ্ট্যযুক্ত যা Arduino এর জন্য, লেবেলযুক্ত VCC, RX, TX, GND পিন সহ।

ডেভেলপমেন্ট কিটগুলিতে বিনামূল্যে Windows সফটওয়্যার, ড্রাইভার, ম্যানুয়াল এবং STM32, Arduino, C++, MATLAB এর জন্য নমুনা কোড অন্তর্ভুক্ত রয়েছে। WT901C IMU সেন্সরের জন্য PDF, ডেমো ভিডিও এবং Android অ্যাপ সমর্থন বৈশিষ্ট্যযুক্ত।
IMU সেন্সর WT901C কোণ আউটপুট প্রোটোকল বিস্তারিত: ডেটা কাঠামো, কোণীয় গণনা, চেকসাম সূত্র, প্যাকেজিং। রোল, পিচ, ইয়াও কোণ, ফার্মওয়্যার সংস্করণ এবং চেকসাম বৈশিষ্ট্যযুক্ত।
Related Collections












