








WitMotion WTRTK-M ZED-F9P RTK GNSS GPS মডিউল, UAV/গাড়ির জন্য সেন্টিমিটার-স্তরের ডিফারেনশিয়াল পজিশনিং, GPS/GLONASS/Galileo/BeiDou, UART TTL, NMEA/UBX/RTCM
WitMotion WTRTK-M ZED-F9P RTK GNSS GPS মডিউল, UAV/গাড়ির জন্য সেন্টিমিটার-স্তরের ডিফারেনশিয়াল পজিশনিং, GPS/GLONASS/Galileo/BeiDou, UART TTL, NMEA/UBX/RTCM
WitMotion
পিকআপের উপলভ্যতা লোড করা যায়নি
Overview
WTRTK-M হল একটি উচ্চ-নির্ভুল RTK পার্থক্য স্থানাঙ্ক মডিউল যা u-blox ZED-F9P GNSS ইঞ্জিনের উপর নির্মিত। এটি GPS, GLONASS, Galileo, BeiDou এবং QZSS একসাথে ট্র্যাক করে এবং RTK সংশোধনের পরে সেন্টিমিটার-স্তরের নির্ভুলতা প্রদান করে। মডিউলটি ডুয়াল-ফ্রিকোয়েন্সি রিসেপশন, 5 Hz রিয়েল-টাইম আউটপুট ম্যাপিং/স্বায়ত্তশাসিত অ্যাপ্লিকেশনের জন্য এবং একটি PC টুল মোবাইল/বেস স্টেশন এবং রুট ভিজ্যুয়ালাইজেশনের জন্য এক-ক্লিক কনফিগারেশনের জন্য প্রদান করে। অ্যান্টি-ইন্টারফেরেন্স এবং ক্যালিব্রেশন প্রযুক্তি ডেটার স্থায়িত্ব এবং নিরাপত্তা বাড়ায়।
মূল বৈশিষ্ট্য
-
সেন্টিমিটার-স্তরের RTK: মোবাইল/বেস কর্মপ্রবাহের সাথে দ্রুত সমন্বয়।
-
মাল্টি-কনস্টেলেশন, ডুয়াল-ফ্রিকোয়েন্সি: GPS L1/L2; GLONASS G1/G2; BeiDou B1/B2; Galileo E1/E5b; QZSS L1/L2.
-
উচ্চ সংবেদনশীলতা &এবং দ্রুত শুরু: 184 চ্যানেল; ঠান্ডা শুরু 24 সেকেন্ড, গরম শুরু 2 সেকেন্ড, পুনরুদ্ধার 2 সেকেন্ড; সম্মিলন ≤10 সেকেন্ড।
-
সময়/মুখের কার্যকারিতা: 1PPS RMS 30 ns (99% 60 ns); মুখের সঠিকতা 0.4° (গতিশীল 0.3°)।
-
সমৃদ্ধ প্রোটোকল: NMEA, UBX, RTCM 3.3; ক্যারিয়ার-ফেজ (RAWX) সমর্থিত।
-
কনফিগারযোগ্য হার &এবং 1 PPS: 0.25–20 Hz আপডেট (ডিফল্ট 1 Hz); দ্বিতীয় পালস 0.25 Hz–10 MHz (ডিফল্ট সময় 1 সেকেন্ড, উচ্চ স্তর ~100 ns)।
-
ডুয়াল UART (TTL) এবং SMA-K / IPEX অ্যান্টেনা বিকল্প; ট্র্যাক এবং ডিভাইস সেটআপ দেখার জন্য পিসি সফটওয়্যার।
-
অ্যাপ্লিকেশন দৃশ্য: UAV জরিপ/মানচিত্র, স্বায়ত্তশাসিত ট্র্যাক্টর/AGV, উচ্চ-নির্ভুল যানবাহন নেভিগেশন, রোবোটিক্স।
RTK কিভাবে কাজ করে (সংক্ষিপ্ত)
একটি স্থির বেস স্টেশন স্যাটেলাইট-মাপের ত্রুটি তার পরিচিত অবস্থানের বিরুদ্ধে গণনা করে এবং RTCM পার্থক্য ডেটা সম্প্রচার করে। মোবাইল স্টেশন এই সংশোধনগুলি প্রয়োগ করে বাস্তব-সময়ে, সেন্টিমিটার-স্তরের অবস্থান নির্ধারণ করতে।
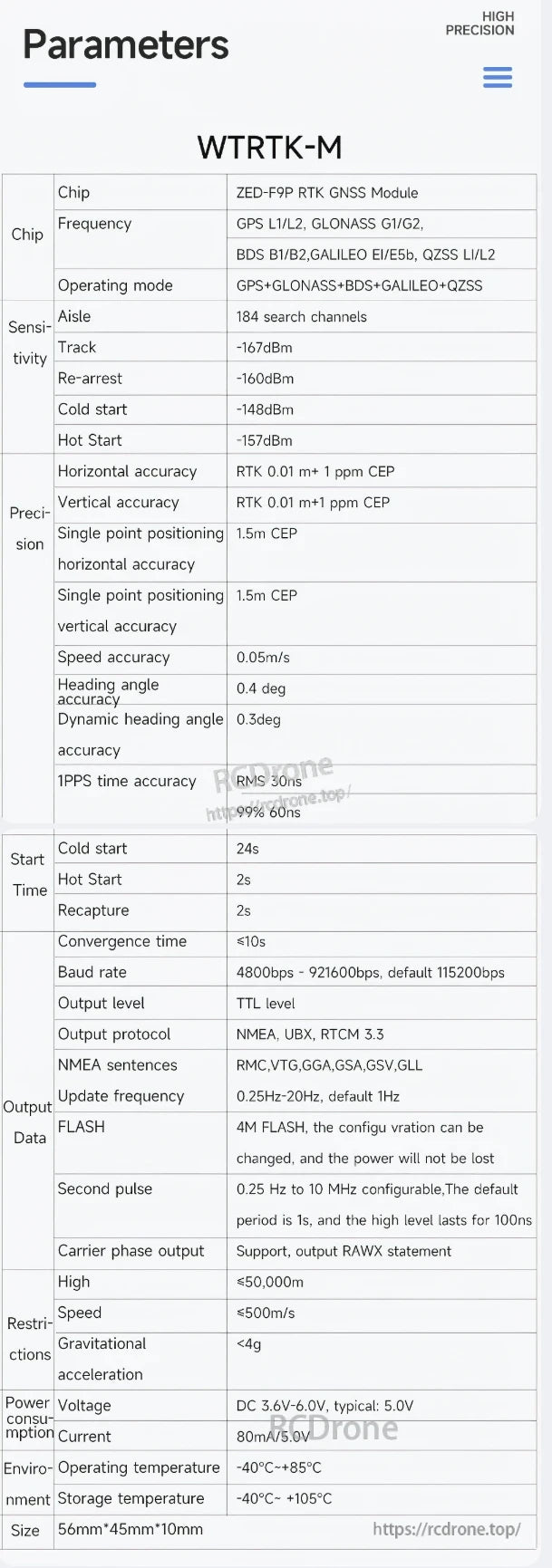
htmlমূল স্পেসিফিকেশন
| আইটেম | স্পেক |
|---|---|
| জিএনএসএস চিপ | ZED-F9P RTK GNSS মডিউল |
| কনস্টেলেশন/ব্যান্ড | জিপিএস L1/L2, গ্লোনাস G1/G2, বেইডু B1/B2, গ্যালিলিও E1/E5b, কিউজেডএসএস L1/L2 |
| চ্যানেল | 184 অনুসন্ধান চ্যানেল |
| সংবেদনশীলতা | ট্র্যাকিং -167 dBm; পুনরায় অধিগ্রহণ -160 dBm; ঠান্ডা শুরু -148 dBm; গরম শুরু -157 dBm |
| আরটিকেএ সঠিকতা (CEP) | অবজেক্টিভ/ভার্টিক্যাল: 0.01 মি + 1 ppm CEP |
| একক-পয়েন্ট সঠিকতা (CEP) | অবজেক্টিভ 1.5 মি, ভার্টিক্যাল 1. 5 m |
| গতি সঠিকতা | 0.05 m/s |
| মুখ সঠিকতা | 0.4° (গতিশীল 0.3°) |
| 1PPS সময় সঠিকতা | RMS 30 ns, 99% 60 ns |
| শুরু/পুনরুদ্ধার | ঠান্ডা 24 সেকেন্ড, গরম 2 সেকেন্ড, পুনরুদ্ধার 2 সেকেন্ড; সঙ্কলন ≤10 সেকেন্ড |
| বড রেট | 4 800–921 600 bps (ডিফল্ট 115 200 bps) |
| বৈদ্যুতিক স্তর | TTL |
| প্রোটোকল | NMEA, UBX, RTCM 3.3; NMEA বাক্য: RMC/VTG/GGA/GSA/GSV/GLL |
| আপডেট হার | 0.25–20 Hz (ডিফল্ট 1 Hz); লক্ষ্য করুন: খুব উচ্চ হার সিরিয়াল লোড বাড়ায়—বিশ্বাসযোগ্যতার জন্য ≤ 5 Hz রাখুন |
| অনবোর্ড ফ্ল্যাশ | 4 MB, পাওয়ার অফ করার পর কনফিগারেশন সংরক্ষণ করে |
| ক্যারিয়ার ফেজ | RAWX আউটপুট সমর্থিত |
| নিষেধাজ্ঞা | উচ্চতা ≤ 50 000 m; গতি ≤ 500 m/s; ত্বরণ < 4 g |
| সরবরাহ | DC 3.6–6.0 V (গড় 5.0 V), ≈ 80 mA @ 5 V |
| অপারেটিং / স্টোরেজ | -40 °C থেকে +85 °C / -40 °C থেকে +105 °C |
| আকার | 56 × 45 × 10 মিমি (সামনের ডায়াগ্রাম চিহ্ন ~46 মিমি উচ্চতা) |
ইন্টারফেস &এবং সূচক
অ্যান্টেনা: SMA-K (IPEX বিকল্প সহ)।
UART পোর্ট (TTL, 4-পিন করে প্রতিটি):
-
P1 (ডান) – VI (3.6–6.0 V, 5 V রিক.), G (GND), T1 (TX), R1 (RX)।
-
P2 (বাম) – VO (3.6–6.0 V, 5 V রিক.), G (GND), T2 (TX), R2 (RX)।
P2 ব্যবহার করা হয় RTCম ইনপুট/আউটপুট; P1 আউটপুট করে NMEA ডেটা। P1/P2 VCC অভ্যন্তরীণভাবে সংযুক্ত—যেকোনো একটির থেকে পাওয়ার।
LEDs
-
PWR: লাল ON = পাওয়ার প্রয়োগ করা হয়েছে।
-
TX1/TX2: সবুজ ঝলক = পোর্টে ডেটা আউটপুট আছে।
-
PPS: ফিক্সের আগে বন্ধ; নীল ঝলক পরে 3D অবস্থান।
-
RTK: RTK না থাকলে বন্ধ; নীল ঝলক RTK ফ্লোট এ; অন RTK ফিক্সড এ।
সংযোগ &এবং সফটওয়্যার
-
ওয়্যারড সেটআপ: অ্যান্টেনা SMA তে সংযুক্ত করুন; UART1 কে PC তে সংযুক্ত করুন অবস্থান ডেটা দেখতে।
-
বেস/মোবাইল: একটি মডিউলকে বেস হিসেবে সেট করুন (আউটপুট RTCM); মোবাইল RTCM গ্রহণ করে RTK অর্জন করে—মোবাইল সংশোধন গ্রহণের পর সরাসরি RTK রোভার হিসেবে ব্যবহার করা যেতে পারে।
-
পিসি সফটওয়্যার: ট্র্যাক ভিজুয়ালাইজেশন, ডেটা ভিউ, এবং এক-ক্লিক বেস/রোভার কনফিগারেশন।
নোটস
-
ডিফল্ট বাউড হল 115 200 bps। যদি আপনি আউটপুট ফ্রিকোয়েন্সি বাড়ান, তবে ওভারফ্লো এড়াতে বাউড অনুযায়ী বাড়ান (প্রায়োগিক সর্বোচ্চ হার ≤ 5 Hz স্ট্যান্ডার্ড লিঙ্কে)।
-
কাস্টম ডেভেলপমেন্ট সমর্থিত।
বিস্তারিত
সেন্টিমিটার স্তরের সঠিকতা সহ উচ্চ নির্ভুলতা ডিফারেনশিয়াল পজিশনিং GPS মডিউল। GPS, GLONASS, গ্যালিলিও, BeiDou সমর্থন করে।মাল্টি-ব্যান্ড রিসিভার, RTK প্রযুক্তি, PPS, TX1, TX2, USR, RTK, PWR সূচক।
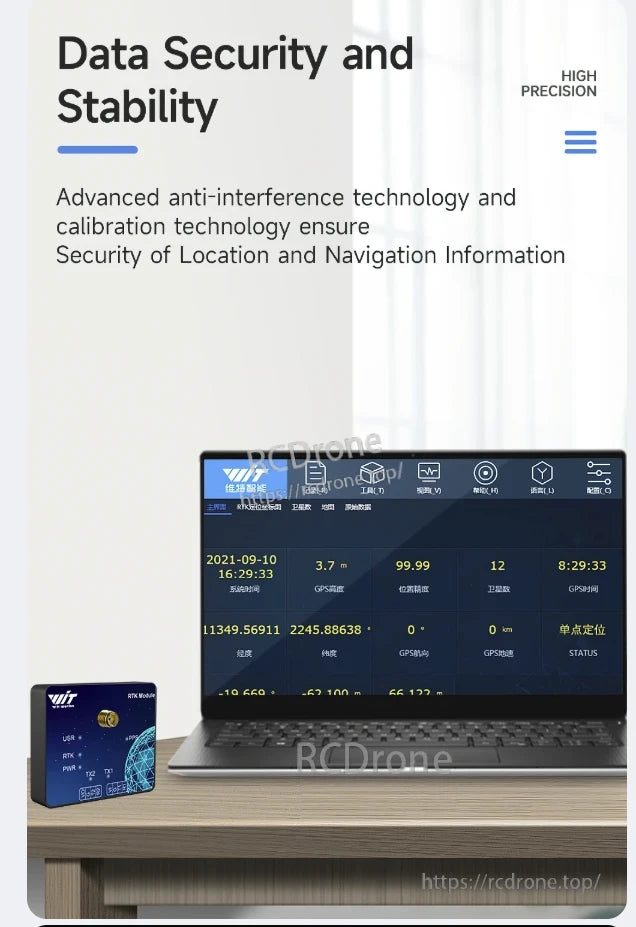
WitMotion WTRTK-M ZED-F9P RTK GNSS GPS উন্নত অ্যান্টি-ইন্টারফেরেন্স এবং ক্যালিব্রেশন প্রযুক্তির সাথে উচ্চ নির্ভুলতা ডেটা সুরক্ষা এবং স্থিতিশীলতা নিশ্চিত করে, যা নির্ভরযোগ্য অবস্থান এবং নেভিগেশন তথ্য প্রদান করে।
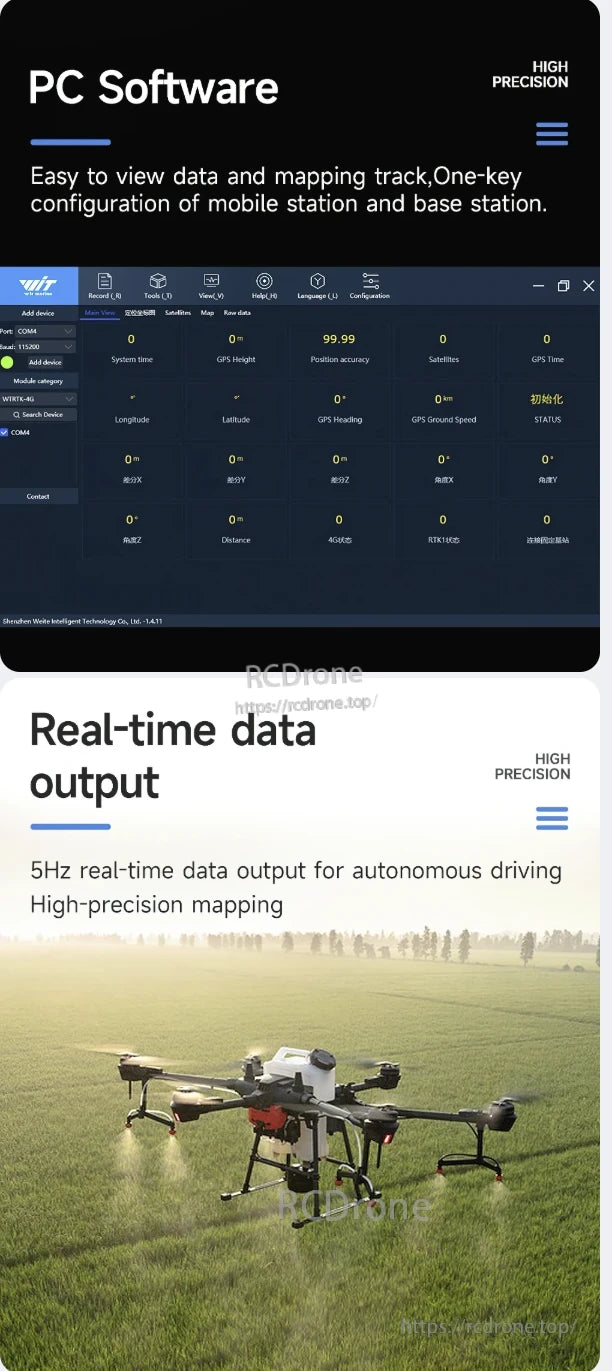
উচ্চ-নির্ভুল RTK GNSS GPS সফটওয়্যার 5Hz রিয়েল-টাইম ডেটা আউটপুট সহ স্বায়ত্তশাসিত ড্রাইভিং এবং ম্যাপিংয়ের জন্য। এক-কী সেটআপ, স্যাটেলাইট ট্র্যাকিং, সঠিক অবস্থান নির্ধারণ এবং বিস্তারিত টেলিমেট্রি সমর্থন করে।
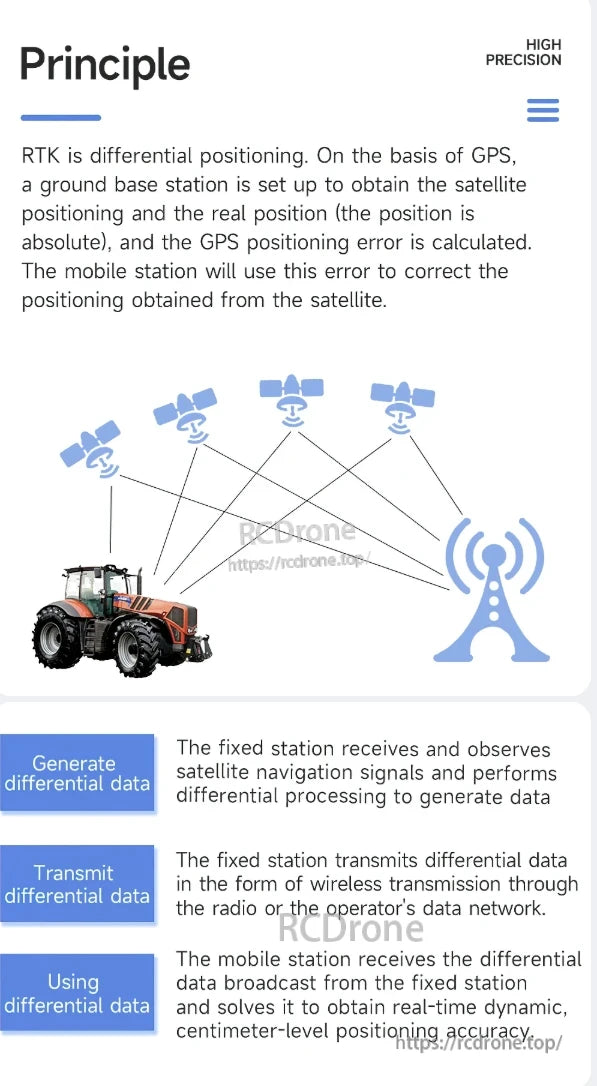
RTK GPS এর সাথে পার্থক্যজনক অবস্থান নির্ধারণ ব্যবহার করে। একটি স্থির স্টেশন স্যাটেলাইট অবস্থান নির্ধারণের ত্রুটি গণনা করে এবং একটি মোবাইল স্টেশনে তারহীনভাবে সংশোধন পাঠায়, যা সঠিক নেভিগেশনের জন্য সেন্টিমিটার স্তরের রিয়েল-টাইম নির্ভুলতা সক্ষম করে।
WTRTK-M ZED-F9P RTK GNSS মডিউল বৈশিষ্ট্যযুক্ত, যা মাল্টি-কনস্টেলেশন সমর্থন করে, উচ্চ নির্ভুলতা (0।01m), দ্রুত শুরু সময়, একাধিক প্রোটোকল, এবং -40°C থেকে +85°C তে কাজ করে।


WitMotion RTK মডিউলের জন্য ওয়্যারড সংযোগের ডায়াগ্রাম: বেস/মোবাইল স্টেশন সেটআপ, SMA অ্যান্টেনা, UART1 PC সংযোগ। সফটওয়্যার, ম্যানুয়াল, ভিডিও, এবং প্রোটোকল সম্পদ অন্তর্ভুক্ত।
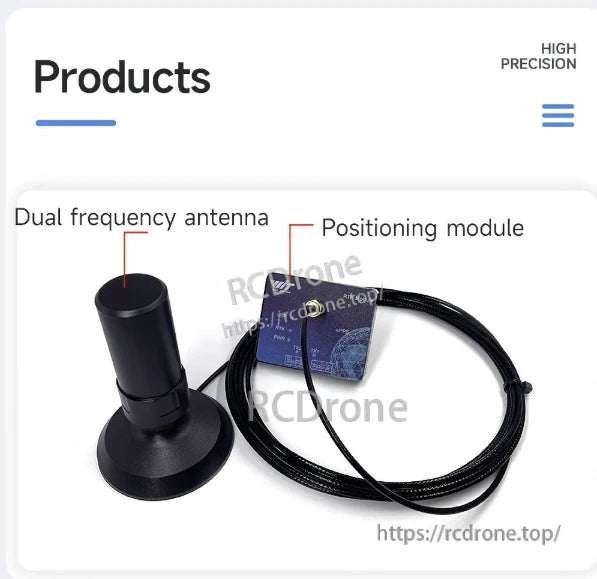
উচ্চ নির্ভুলতা GNSS GPS এর জন্য ডুয়াল ফ্রিকোয়েন্সি অ্যান্টেনা এবং পজিশনিং মডিউল
Related Collections








