









ESP32 মাইক্রোআরওএস রোবট কার কিট (VM কন্ট্রোলার), ROS2 হাম্বল, TOF লাইডার, ৭.৪V ২০০০mAh - ম্যাক সমর্থিত নয়
ESP32 মাইক্রোআরওএস রোবট কার কিট (VM কন্ট্রোলার), ROS2 হাম্বল, TOF লাইডার, ৭.৪V ২০০০mAh - ম্যাক সমর্থিত নয়
Yahboom
পিকআপের উপলভ্যতা লোড করা যায়নি
সংক্ষিপ্ত বিবরণ
ESP32 MicroROS Robot Car Virtual Machine as controller (Mac Not Support) হল একটি ROS2 শিক্ষামূলক রোবট কার যা জটিল কম্পিউটিং কাজগুলি একটি পিসি ভার্চুয়াল মেশিন পরিবেশে স্থানান্তর করে। রোবটটি একটি অনবোর্ড ESP32 কো-প্রসেসর এবং MicroROS WiFi UDP যোগাযোগ ব্যবহার করে সেন্সর/ডেটা পিসি ভার্চুয়াল মেশিনে প্রেরণ করে, যেখানে গণনা সম্পন্ন হয় এবং নিয়ন্ত্রণ সিদ্ধান্তগুলি তৈরি হয়।
এই প্ল্যাটফর্মটি ROS2 Humble এবং Python3 প্রোগ্রামিং সমর্থন করে এবং এটি লিডার বাধা এড়ানো, অনুসরণ, মানচিত্র নেভিগেশন, RViz সিমুলেশন এবং বহু-মেশিন সিঙ্ক্রোনাইজেশন নিয়ন্ত্রণ সহ শেখা এবং উন্নয়ন কর্মপ্রবাহের জন্য ডিজাইন করা হয়েছে।
মূল বৈশিষ্ট্যগুলি
- ভার্চুয়াল মেশিন মাস্টার কন্ট্রোল: মাস্টার কন্ট্রোলার হিসাবে পিসি-পার্শ্ব ভার্চুয়াল মেশিন ব্যবহার করে শেখার খরচ কমায়, অ্যালগরিদম কম্পিউটিং দক্ষতা উন্নত করে এবং DIY/আপগ্রেড সমর্থন করে। দ্রষ্টব্য: ম্যাক সিস্টেম সমর্থিত নয়।
- অনবোর্ড ESP32 প্রসেসর: বিল্ট-ইন Wi-Fi এবং ব্লুটুথ ফাংশন; মাইক্রোআরওএস সমর্থন করে রোবট এবং ভার্চুয়াল মেশিনের মধ্যে রিয়েল-টাইম ডেটা ট্রান্সমিশনের জন্য।
- ROS2 হাম্বল সমর্থন: এই পণ্যটি ROS2 হাম্বল ব্যবহার করে।
- মাল্টি-মাস্টার সমর্থন: পিসি ভার্চুয়াল মেশিন মাস্টার ছাড়াও, র্যাজবেরি পাই ৫ বা জেটসন ন্যানোকে ডেস্কটপ মাস্টার হিসেবে চ্যাসিসের সাথে যোগাযোগের জন্য সমর্থন করে (সমর্থনকারী ব্যবহার নথি এবং সংশ্লিষ্ট সিস্টেম ইমেজ সহ)।
- TOF লিডার ফাংশন: লিডার বাধা এড়ানো, লিডার ট্র্যাকিং, লিডার গার্ড এবং লিডার প্যাট্রোল।
- রিমোট কন্ট্রোল অপশন: iOS/অ্যান্ড্রয়েড অ্যাপ রিমোট কন্ট্রোল; মাল্টি-মেশিন হ্যান্ডেল/কীবোর্ড কন্ট্রোল রিয়েল টাইমে সিঙ্ক্রোনাস মুভমেন্টের জন্য। হ্যান্ডেল কন্ট্রোলার অন্তর্ভুক্ত নয়।
- রোবট তথ্য প্রকাশ: চ্যাসিস রাডার, IMU, গতি এবং বাজারের মতো সেন্সর থেকে নিয়ন্ত্রণ তথ্য ভার্চুয়াল মেশিনে প্রকাশ করতে পারে।
- চ্যাসিস & শক্তি: অ্যালুমিনিয়াম অ্যালয় বডি; 4PCS 310 এনকোডার মোটর; 7.4V বড় ক্ষমতার ব্যাটারি প্যাক।
স্পেসিফিকেশন
ESP32 (অনবোর্ড প্রসেসর)
| ESP32 মডেল | ESP32-S3-WROOM-1U-N4R2 |
|---|---|
| কার্নেল | Xtensa LX7 32-বিট ডুয়াল-কোর মাইক্রোপ্রসেসর |
| পিনের সংখ্যা | ৪১ |
| GPIOs সংখ্যা | ৩৬ |
| প্রধান ফ্রিকোয়েন্সি ক্লক | ২৪০MHz |
| SRAM | ৫১২KB |
| ROM | ৩৮৪KB |
| PSRAM | ২MB |
| ফ্ল্যাশ | ৪MB |
| অপারেটিং ভোল্টেজ | ৩V~৩.৬V |
| WIFI | IEEE 802.11 b/g/n; ২.৪ GHz |
| BT | V5.0 |
| যোগাযোগ ইন্টারফেস | SPI, I2S, I2C, UART, USB OTG, SDIO, JTAG, DVP, LCD |
| অপারেটিং তাপমাত্রা | -40~85C |
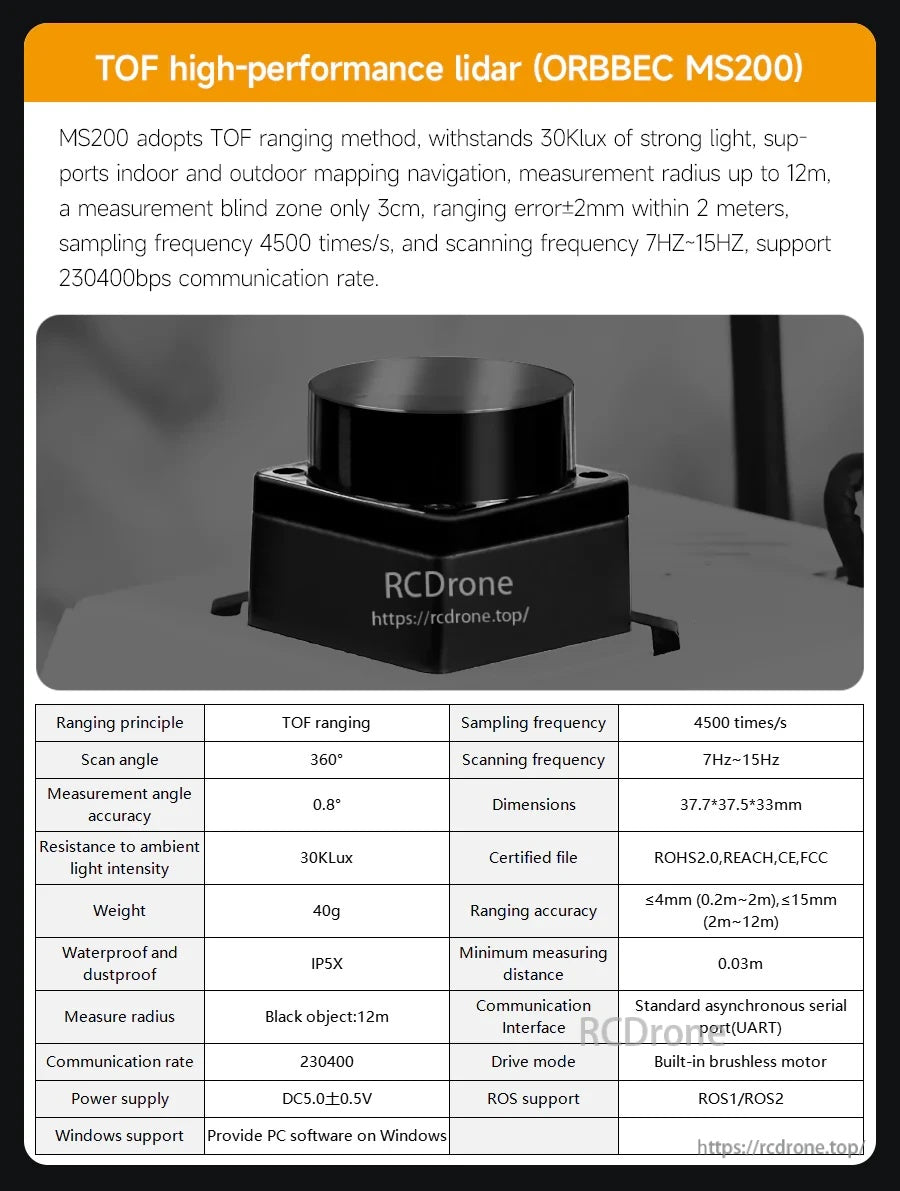
TOF উচ্চ-প্রদর্শন লিডার (ORBBEC MS200)
MS200 TOF পরিসীমা পদ্ধতি গ্রহণ করে, 30Klux শক্তিশালী আলো সহ্য করে, ইনডোর এবং আউটডোর ম্যাপিং নেভিগেশন সমর্থন করে, পরিমাপের ব্যাসার্ধ 12m পর্যন্ত, পরিমাপের ব্লাইন্ড জোন মাত্র 3cm, 2 মিটারের মধ্যে পরিসীমা ত্রুটি 2mm, স্যাম্পলিং ফ্রিকোয়েন্সি 4500 বার/সেকেন্ড, এবং স্ক্যানিং ফ্রিকোয়েন্সি 7Hz~15Hz, 230400bps যোগাযোগ হার সমর্থন করে।
| পরিসীমা নীতি | TOF পরিসীমা |
|---|---|
| স্ক্যান কোণ | 360 |
| পরিমাপ কোণ নির্ভুলতা | 0.8 |
| পরিবেষ্টিত আলো তীব্রতার প্রতিরোধ ক্ষমতা | 30Klux |
| ওজন | 40g |
| জলরোধী এবং ধূলারোধী | IP5X |
| পরিমাপের ব্যাসার্ধ | কালো বস্তু:12m |
| সর্বনিম্ন পরিমাপের দূরত্ব | 0.03m |
| পরিসীমা নির্ধারণের সঠিকতা | <=4mm (0.2m~2m), <=15mm (2m~12m) |
| স্যাম্পলিং ফ্রিকোয়েন্সি | 4500 বার/সেকেন্ড |
| স্ক্যানিং ফ্রিকোয়েন্সি | 7Hz~15Hz |
| মাত্রা | 37.7*37.5*33mm |
| যোগাযোগের হার | 230400 |
| যোগাযোগ ইন্টারফেস | স্ট্যান্ডার্ড অ্যাসিঙ্ক্রোনাস সিরিয়াল পোর্ট (UART) |
| ড্রাইভ মোড | বিল্ট-ইন ব্রাশলেস মোটর |
| বিদ্যুৎ সরবরাহ | DC5.0 .5V |
| ROS সমর্থন | ROS1/ROS2 |
| প্রত্যয়িত ফাইল | ROHS2.0,REACH,CE,FCC |
| উইন্ডোজ সমর্থন | উইন্ডোজে পিসি সফটওয়্যার প্রদান করুন |
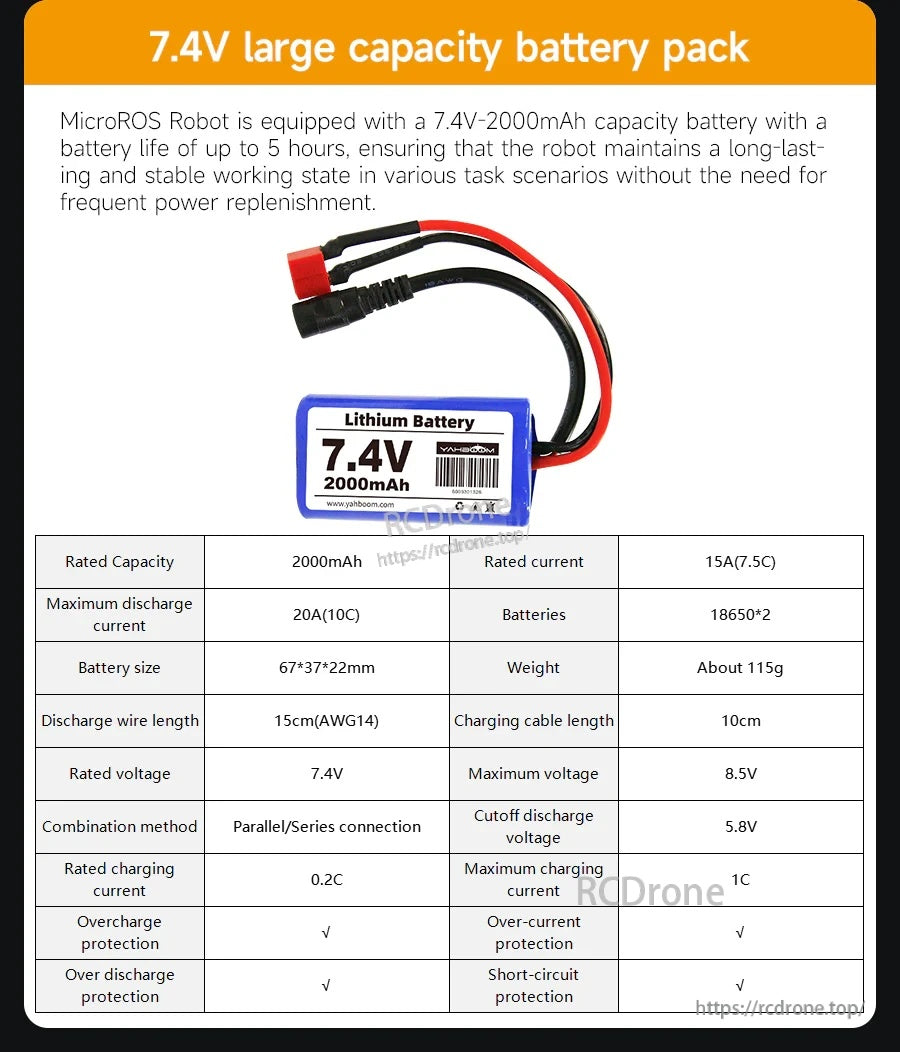
7.4V বড় ক্ষমতার ব্যাটারি প্যাক
MicroROS রোবটটি 7.4V-2000mAh ক্ষমতার ব্যাটারি দিয়ে সজ্জিত, যার ব্যাটারি লাইফ 5 ঘন্টা পর্যন্ত।
| নির্ধারিত ভোল্টেজ | 7.4V |
|---|---|
| নির্ধারিত ক্ষমতা | 2000mAh |
| নির্ধারিত বর্তমান | 15A(7.5C) |
| সর্বাধিক স্রাব বর্তমান | 20A(10C) |
| ব্যাটারি | 18650*2 |
| ব্যাটারির আকার | 67*37*22mm |
| ওজন | প্রায় 115g |
| স্রাব তারের দৈর্ঘ্য | 15cm(AWG14) |
| চার্জিং কেবল দৈর্ঘ্য | 10cm |
| সর্বাধিক ভোল্টেজ | 8.5V |
| কাটঅফ স্রাব ভোল্টেজ | 5.8V |
| সংযোগ পদ্ধতি | সমান্তরাল/সিরিজ সংযোগ |
| নির্ধারিত চার্জিং বর্তমান | 0.2C |
| সর্বাধিক চার্জিং কারেন্ট | 1C |
| অতিরিক্ত চার্জ সুরক্ষা | হ্যাঁ |
| অতিরিক্ত কারেন্ট সুরক্ষা | হ্যাঁ |
| অতিরিক্ত ডিসচার্জ সুরক্ষা | হ্যাঁ |
| শর্ট-সার্কিট সুরক্ষা | হ্যাঁ |
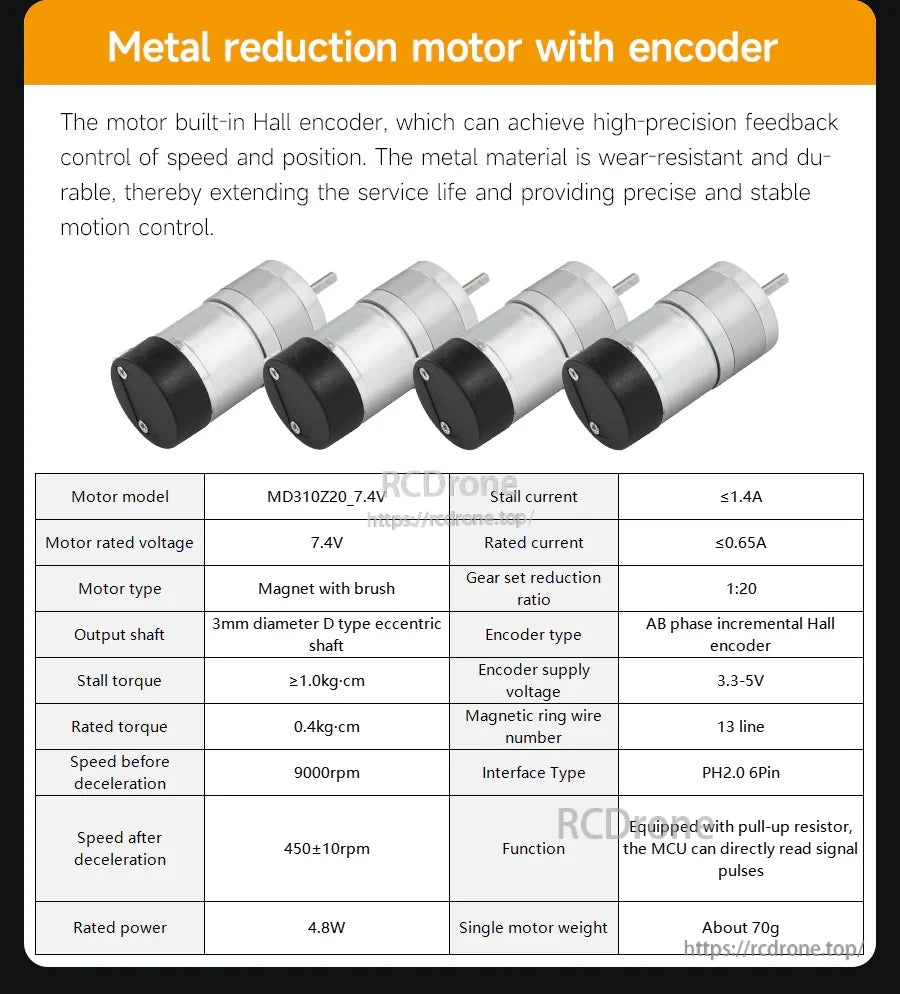
এনকোডার সহ মেটাল রিডাকশন মোটর
মোটরের একটি বিল্ট-ইন হল এনকোডার রয়েছে গতি এবং অবস্থান প্রতিক্রিয়া নিয়ন্ত্রণের জন্য।
| মোটর মডেল | MD310Z20_7.4V |
|---|---|
| মোটর রেটেড ভোল্টেজ | 7.4V |
| মোটর প্রকার | ব্রাশ সহ চুম্বক |
| গিয়ার সেট হ্রাস অনুপাত | 1:20 |
| আউটপুট শ্যাফ্ট | 3mm ব্যাস D প্রকারের অমসৃণ শ্যাফ্ট |
| এনকোডার প্রকার | AB ফেজ ইনক্রিমেন্টাল হল এনকোডার |
| এনকোডার সরবরাহ ভোল্টেজ | 3.3-5V |
| চুম্বকীয় রিং তারের সংখ্যা | 13 লাইন |
| ইন্টারফেস প্রকার | PH2.0 6Pin |
| গতি হ্রাসের আগে | 9000rpm |
| গতি হ্রাসের পরে | 450 rpm |
| নির্ধারিত টর্ক | 0.4kg*cm |
| স্থির টর্ক | >=1.0kg*cm |
| নির্ধারিত বর্তমান | <=0.65A |
| স্থির বর্তমান | <=1.4A |
| রেটেড পাওয়ার | 4.8W |
| একক মোটরের ওজন | প্রায় 70g |
| ফাংশন | পুল-আপ রেজিস্টর সহ সজ্জিত, MCU সরাসরি সিগন্যাল পালস পড়তে পারে |
প্রয়োগসমূহ
- ROS2 শেখা এবং শেখানো (তত্ত্ব + অনুশীলন)
- লাইডার বাধা এড়ানো, ট্র্যাকিং (অনুসরণ), গার্ড এবং টহল
- SLAM ম্যাপিং এবং নেভিগেশন ওয়ার্কফ্লো (RViz সিমুলেশন সহ)
- মাল্টি-রোবট সিঙ্ক্রোনাইজেশন কন্ট্রোল এবং মাল্টি-মেশিন নেভিগেশন
- MicroROS/ESP32 ড্রাইভার এবং ডেটা যোগাযোগ অনুশীলন (MicroROS এর মাধ্যমে WiFi UDP)
টিউটোরিয়াল & কোড রিসোর্স
টিউটোরিয়াল লিঙ্ক:http://www.yahboom.net/study/MicroROS-ESP32
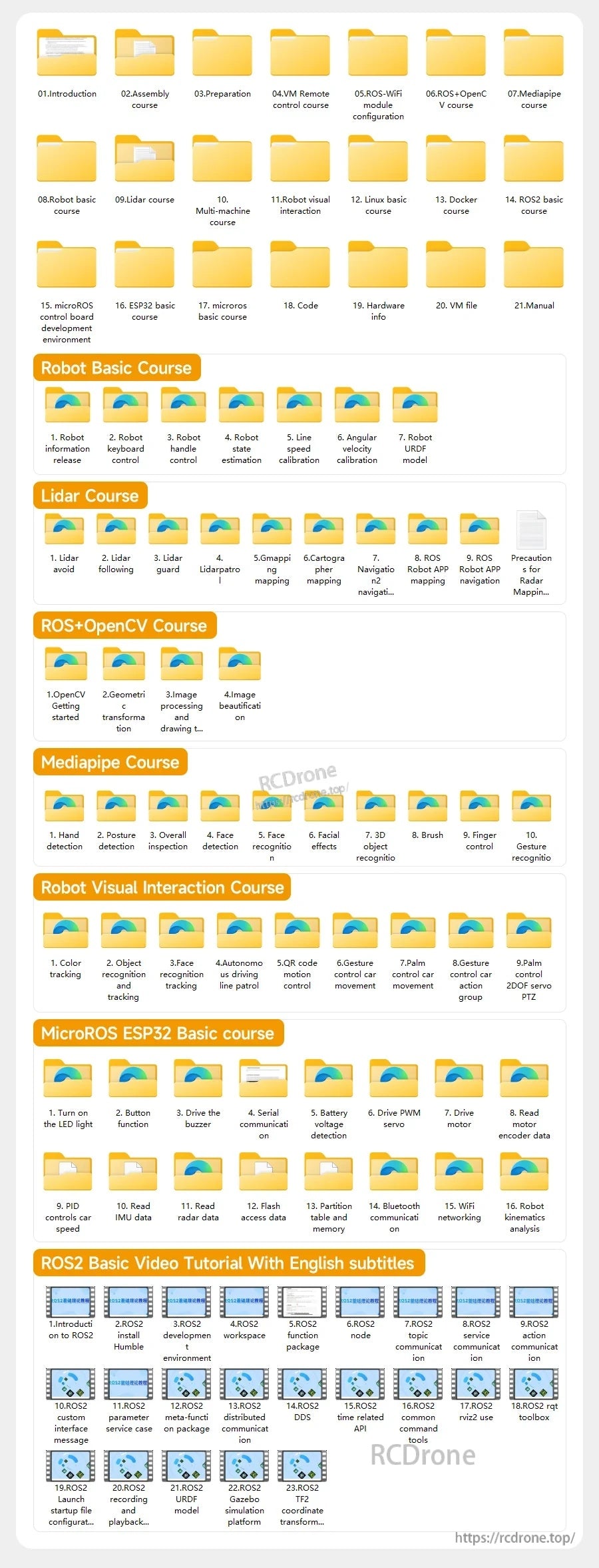
কোর্সের সংক্ষিপ্ত বিবরণ (যেমন প্রদান করা হয়েছে):
- ০১. ভূমিকা: 1) রিডমি - শেখার পথ 2) লিডার পরিচিতি 3) মাইক্রোআরওএস কন্ট্রোল বোর্ড পরিচিতি 4) প্রায়শই জিজ্ঞাসিত প্রশ্নাবলী 5) চার্জিং সম্পর্কে
- 02. সংযোজন কোর্স: সংযোজন ধাপসমূহ
- 03. প্রস্তুতি: 1) ফার্মওয়্যার লিখুন 2) কিভাবে VM ইনস্টল এবং ব্যবহার করবেন 3) মাইক্রোআরওএস কন্ট্রোল বোর্ড কনফিগারেশন 4) মাইক্রোআরওএস এজেন্টের সাথে সংযোগ করুন
- 04. VM রিমোট কন্ট্রোল কোর্স: 1) VM কীবোর্ড রিমোট কন্ট্রোল 2) VM হ্যান্ডেল রিমোট কন্ট্রোল
- 05. রোবট মৌলিক কোর্স: 1) রোবট তথ্য প্রকাশ 2) রোবট কীবোর্ড নিয়ন্ত্রণ 3) রোবট হ্যান্ডেল নিয়ন্ত্রণ 4) রোবট অবস্থা অনুমান 5) লিনিয়ার গতি ক্যালিব্রেশন 6) কৌণিক বেগ ক্যালিব্রেশন 7) রোবট ইউআরডিএফ মডেল
- 06. লিডার কোর্স: 1) লিডার এড়ানো 2) লিডার অনুসরণ 3) লিডার গার্ড 4) লিডার টহল 5) জিম্যাপিং ম্যাপিং 6) কার্টোগ্রাফার ম্যাপিং 7) নেভিগেশন2 নেভিগেশন এড়ানো 8) ROS রোবট অ্যাপ ম্যাপিং 9) ROS রোবট অ্যাপ নেভিগেশন
- 07.মাল্টি-মেশিন কোর্স: 1) মাল্টি-মেশিন হ্যান্ডেল নিয়ন্ত্রণ 2) মাল্টি-মেশিন কীবোর্ড নিয়ন্ত্রণ 3) মাল্টি-মেশিন নেভিগেশন
- 08. লিনাক্স বেসিক কোর্স: 1) লিনাক্স সিস্টেমের পরিচিতি 2) উবুন্টু ফাইল সিস্টেম 3) উবুন্টু সাধারণ কমান্ড 4) উবুন্টু সাধারণ এডিটর 5) উবুন্টু সফটওয়্যার অপারেশন কমান্ড 6) ভার্চুয়াল মেশিন ইনস্টলেশন 7) SSH রিমোট নিয়ন্ত্রণ 8) VNC রিমোট নিয়ন্ত্রণ 9) রিমোট ফাইল ট্রান্সফার 10) ড্রাইভার লাইব্রেরি এবং যোগাযোগ 11) স্ট্যাটিক আইপি এবং হটস্পট মোড 12) ডিভাইস আইডি বাঁধা 13) ক্ষমতা সম্প্রসারণ এবং সম্পদ বরাদ্দ 14) সিস্টেম সফটওয়্যার সোর্স আপডেট 15) রুট পাসওয়ার্ড সেট করুন 16) সুডো ফ্রি পাসওয়ার্ড 17) ওয়াইফাই নেটওয়ার্কে সংযোগ করুন 18) সিস্টেম ভার্সন দেখুন 19) কাস্টমাইজড সার্ভিস ম্যানেজমেন্ট 20) সিস্টেম ইমেজ ব্যাকআপ
- 09. ডকার কোর্স: 1) ওভারভিউ এবং ইনস্টলেশন 2) সাধারণ কমান্ড 3) গভীরভাবে বোঝা এবং ইমেজ প্রকাশ 4) হার্ডওয়্যার ইন্টারঅ্যাকশন এবং ডেটা প্রসেসিং 5) রোবট ডকার কন্টেইনারে প্রবেশ
- 10.ROS2 মৌলিক কোর্স: 1) ROS2 এর পরিচিতি 2) ROS2 ইনস্টল হাম্বল 3) ROS2 ডেভেলপমেন্ট পরিবেশ 4) ROS2 ওয়ার্কস্পেস 5) ROS2 ফাংশন প্যাকেজ 6) ROS2 নোড 7) ROS2 টপিক যোগাযোগ 8) ROS2 সার্ভিস যোগাযোগ 9) ROS2 অ্যাকশন যোগাযোগ 10) ROS2 কাস্টম ইন্টারফেস মেসেজ 11) ROS2 প্যারামিটার সার্ভিস কেস 12) ROS2 মেটা-ফাংশন প্যাকেজ 13) ROS2 বিতরণকৃত যোগাযোগ 14) ROS2 DDS 15) ROS2 সময় সম্পর্কিত API 16) ROS2 সাধারণ কমান্ড টুলস 17) ROS2 rviz2 ব্যবহার 18) ROS2 rqt টুলবক্স 19) ROS2 লঞ্চ স্টার্টআপ ফাইল কনফিগারেশন 20) ROS2 রেকর্ডিং এবং প্লেব্যাক টুল 21) ROS2 URDF মডেল 22) ROS2 গ্যাজেবো সিমুলেশন প্ল্যাটফর্ম 23) ROS2 TF2 কোঅর্ডিনেট ট্রান্সফরমেশন
- 11. মাইক্রোROS কন্ট্রোল বোর্ড ডেভেলপমেন্ট পরিবেশ: 1) মাইক্রোROS কন্ট্রোল বোর্ডের পরিচিতি 2) ESP32-IDF ডেভেলপমেন্ট পরিবেশ সেট আপ 3) ESP32-IDF কনফিগারেশন টুল 4) ESP32-মাইক্রোROS কম্পোনেন্ট ইনস্টল 5) মাইক্রোROS এজেন্ট ইনস্টল এবং শুরু 6) ফ্ল্যাশ-টুল বার্নিং ফার্মওয়্যার
- 12.ESP32 মৌলিক কোর্স: 1) LED আলো চালু করা 2) বোতাম ফাংশন 3) বাজার চালানো 4) সিরিয়াল যোগাযোগ 5) ব্যাটারি ভোল্টেজ সনাক্তকরণ 6) PWM সার্ভো চালানো 7) মোটর চালানো 8) মোটর এনকোডার ডেটা পড়া 9) PID নিয়ন্ত্রণ গাড়ির গতি 10) IMU ডেটা পড়া 11) রাডার ডেটা পড়া 12) ফ্ল্যাশ অ্যাক্সেস ডেটা 13) পার্টিশন টেবিল এবং মেমরি 14) ব্লুটুথ যোগাযোগ 15) WiFi নেটওয়ার্কিং 16) রোবট কাইনেমেটিক্স বিশ্লেষণ
- 13. microROS মৌলিক কোর্স: 1) টপিক প্রকাশ করা 2) টপিক সাবস্ক্রাইব করা 3) মাল্টি-টপিক সাবস্ক্রাইব এবং প্রকাশ করা 4) বাজার টপিক সাবস্ক্রাইব করা 5) PWM সার্ভো টপিক সাবস্ক্রাইব করা 6) গতি নিয়ন্ত্রণ টপিক সাবস্ক্রাইব করা 7) গতি টপিক প্রকাশ করা 8) IMU ডেটা টপিক প্রকাশ করা 9) লিডার ডেটা টপিক প্রকাশ করা 10) কাস্টমাইজড ট্রান্সমিশন ইন্টারফেস
ভিডিও
সহায়তা
প্রি-সেলস সামঞ্জস্যতা প্রশ্নের জন্য (ভার্চুয়াল মেশিন সেটআপ এবং নিয়ন্ত্রণ পদ্ধতি সহ) অথবা বিক্রয়োত্তর সহায়তার জন্য, যোগাযোগ করুন [email protected] or ভিজিট https://rcdrone.top/.
বিস্তারিত
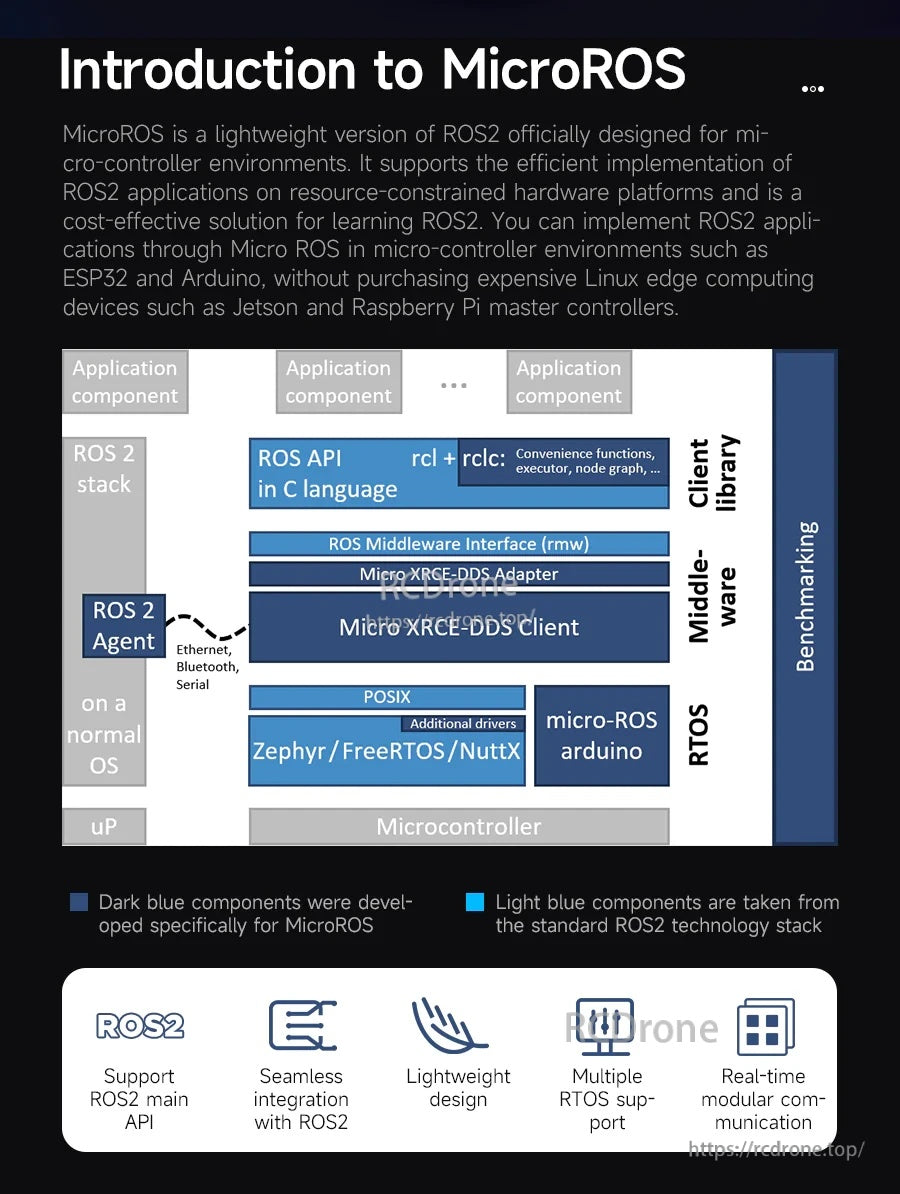
মাইক্রো-আরওএস মাইক্রোকন্ট্রোলারগুলির জন্য আরওএস ২ সম্প্রসারণ করে, একটি এজেন্ট স্তরের মাধ্যমে আরওএস ২ যোগাযোগ সক্ষম করে।

একটি পিসি ভার্চুয়াল মেশিন ভারী আরওএস ২ গণনা কাজ পরিচালনা করে যখন রোবটটি সেন্সর ডেটা ওয়াই-ফাই এর মাধ্যমে প্রেরণ করে প্রতিক্রিয়াশীল নিয়ন্ত্রণের জন্য।
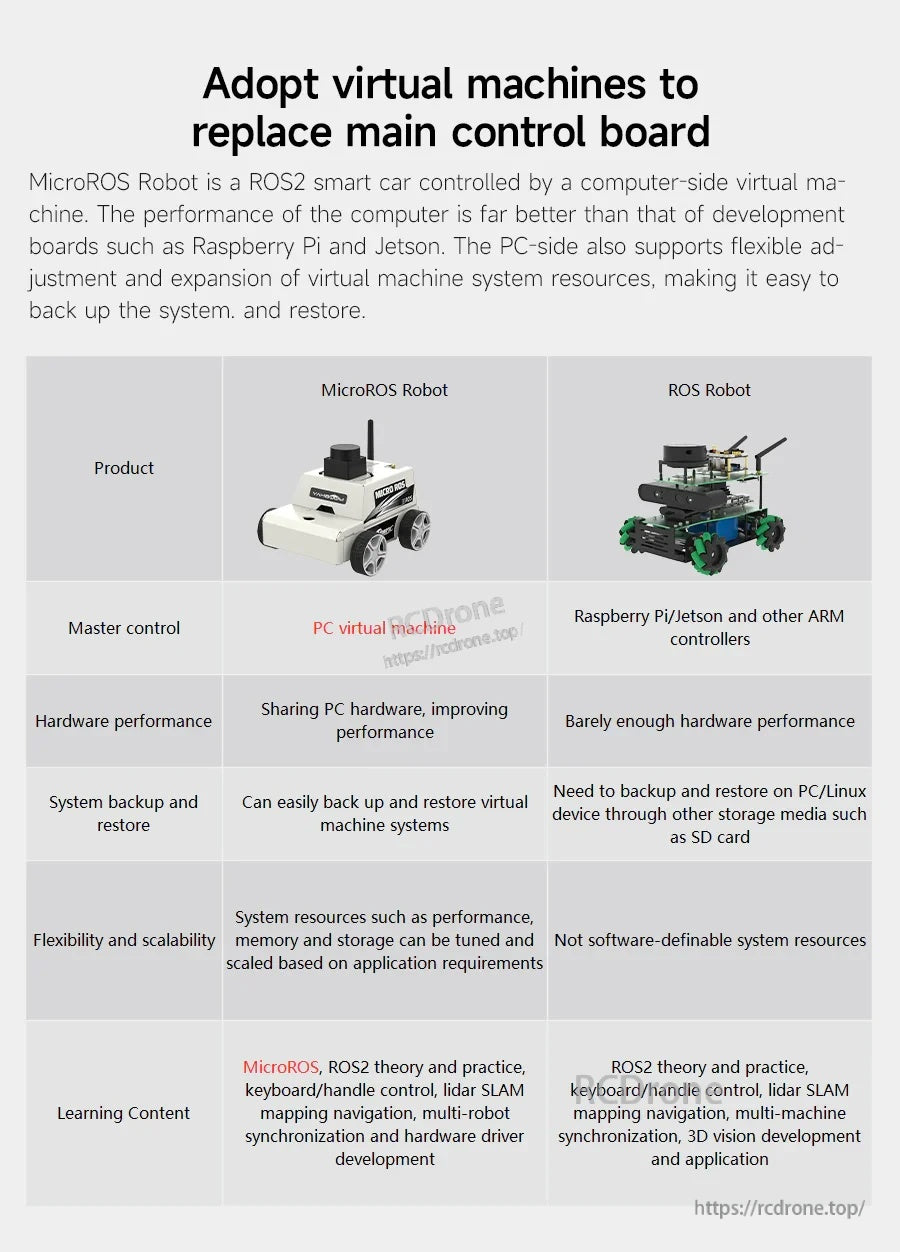
ভার্চুয়াল-মেশিন মাস্টার কন্ট্রোল সেটআপ সহজ করতে সাহায্য করে, পিসি সম্পদ ব্যবহার করে কর্মক্ষমতা উন্নত করে এবং ব্যাকআপ/পুনরুদ্ধার সহজ করে তোলে।
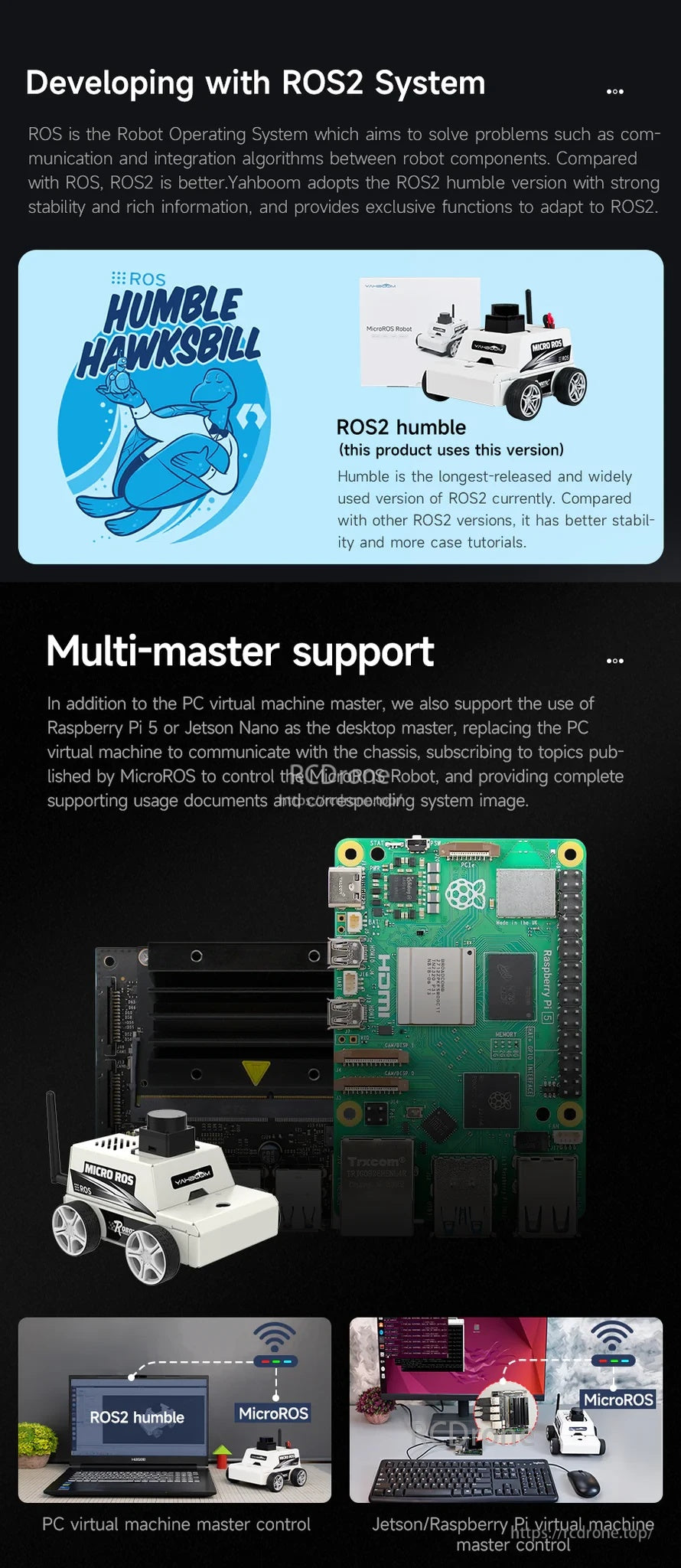
পিসি ভার্চুয়াল মেশিন বা সামঞ্জস্যপূর্ণ এমবেডেড মাস্টার সহ নমনীয় মাস্টার বিকল্প সহ আরওএস ২ হাম্বল সমর্থন।

ধাপে ধাপে শেখার বিষয়বস্তু এবং উদাহরণ কোড সাধারণ আরওএস ২ রোবোটিক্স কর্মপ্রবাহকে মৌলিক থেকে উন্নত ডেমো পর্যন্ত সমর্থন করে।

টিওএফ লিডার ফাংশনগুলি বাধা এড়ানো, বস্তু ট্র্যাকিং, গার্ড সতর্কতা এবং স্বায়ত্তশাসিত টহল আচরণ সক্ষম করে।
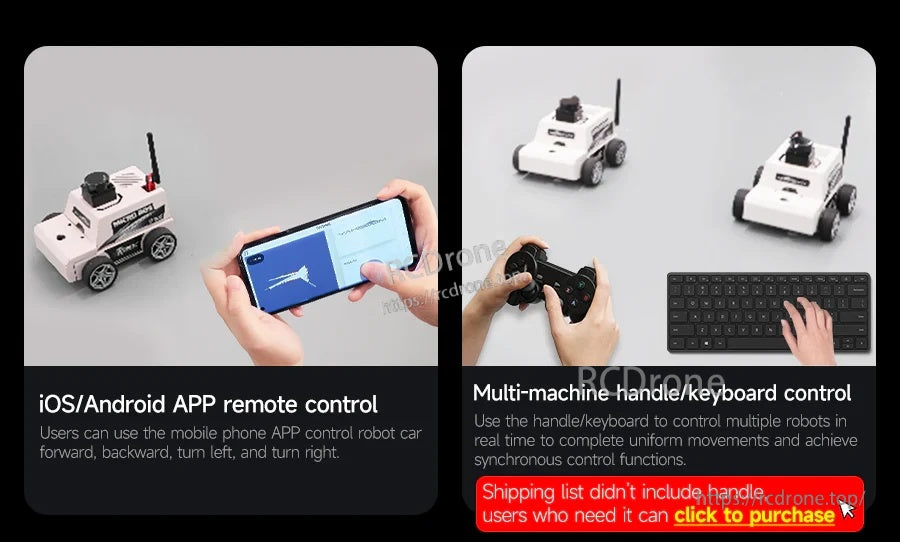
নিয়ন্ত্রণের বিকল্পগুলির মধ্যে রয়েছে একটি iOS/Android অ্যাপ্লিকেশন এবং একটি হ্যান্ডেল বা কীবোর্ড ব্যবহার করে রিয়েল-টাইম মাল্টি-রোবট সিঙ্ক্রোনাইজেশন।
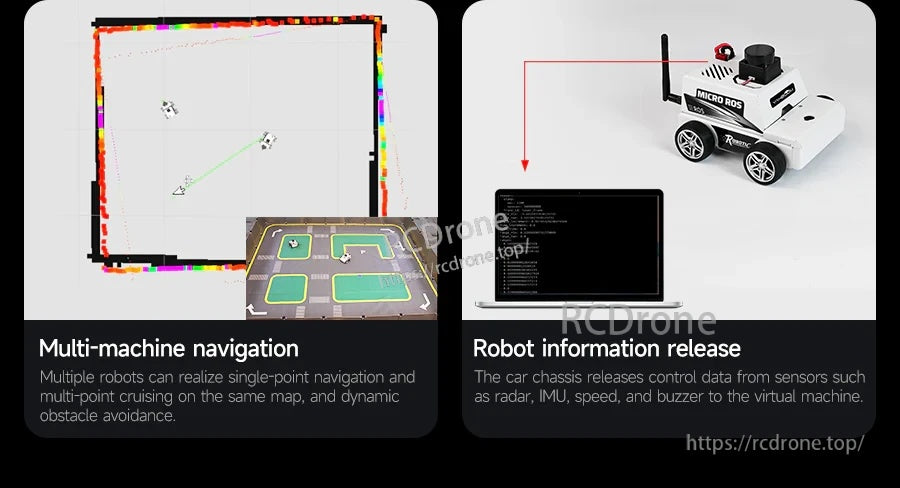
সেন্সর বিষয়গুলি যেমন লিডার, IMU, চাকা গতি, এবং বাজার স্থিতি মনিটরিং এবং নিয়ন্ত্রণের জন্য মাস্টারে প্রকাশ করা যেতে পারে।
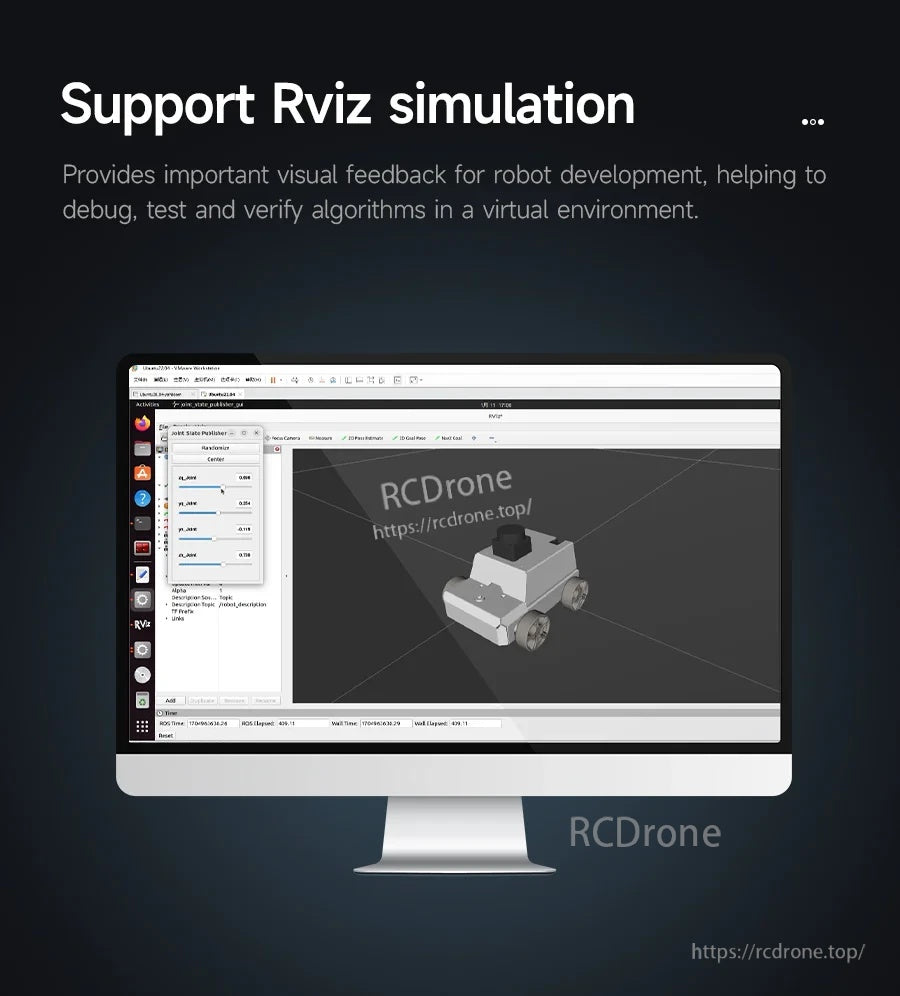
RViz ভিজ্যুয়ালাইজেশন ROS 2 অ্যাপ্লিকেশনগুলি বিকাশের সময় রোবটের আচরণ পরীক্ষা, ডিবাগ এবং যাচাই করতে সহায়তা করে।
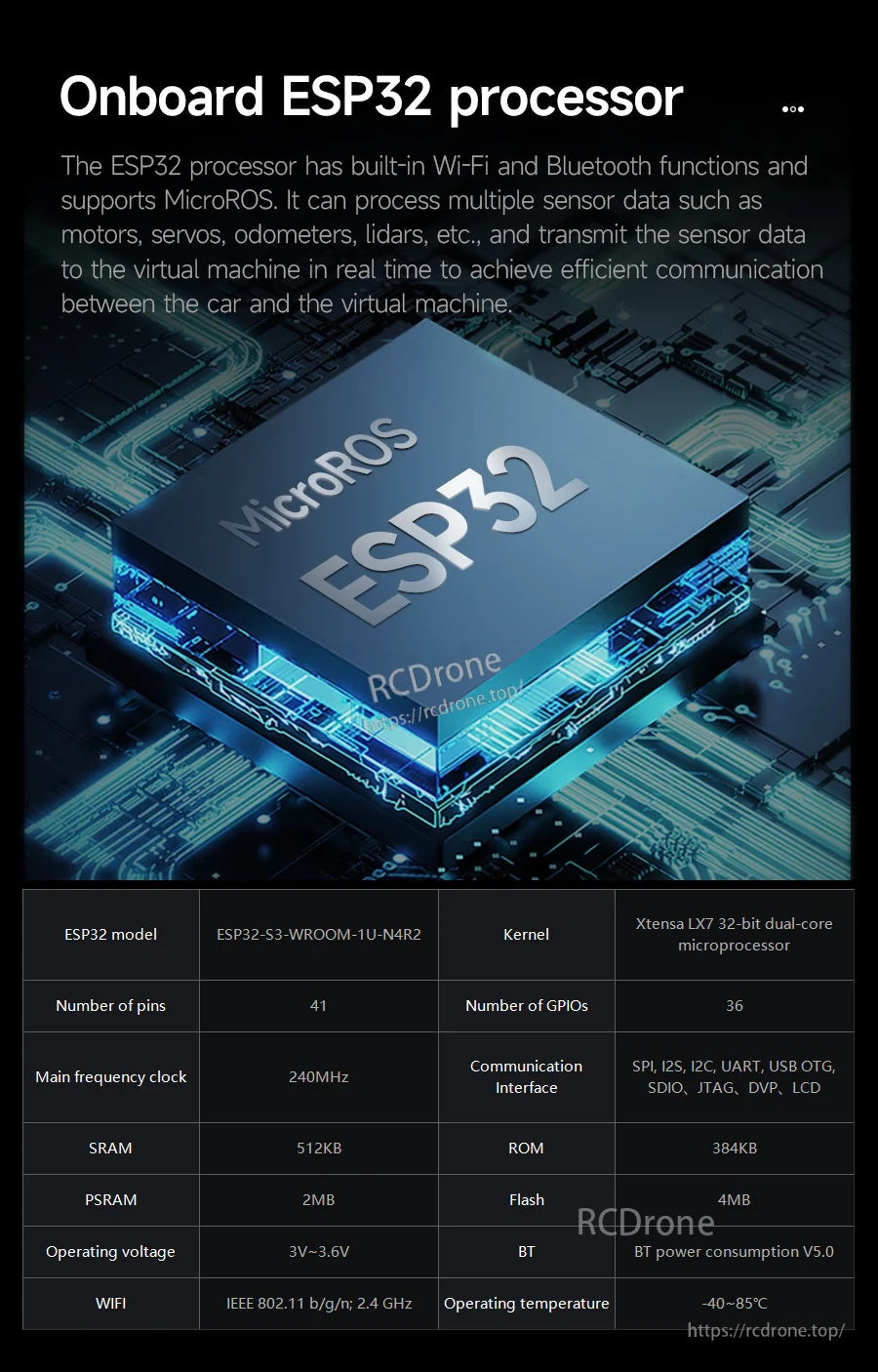
একটি অনবোর্ড ESP32 কো-প্রসেসর মাইক্রো-ROS যোগাযোগ এবং চ্যাসিস ডেটা লিঙ্কের জন্য ইন্টিগ্রেটেড Wi-Fi/Bluetooth প্রদান করে।
MS200 TOF লিডার দ্রুত স্যাম্পলিং এবং শক্তিশালী-আলো প্রতিরোধের সাথে বিভিন্ন পরিবেশের জন্য ম্যাপিং এবং নেভিগেশনে সহায়তা করে।
একটি 7.4V ব্যাটারি প্যাক দীর্ঘায়িত শেখা, পরীক্ষা এবং ডেমো সেশনের জন্য পোর্টেবল পাওয়ার সরবরাহ করে।
এনকোডার মোটরগুলি ওডোমেট্রি এবং ক্লোজড-লুপ ড্রাইভিং পরীক্ষার জন্য প্রতিক্রিয়া সহ স্থিতিশীল গতি নিয়ন্ত্রণ প্রদান করে।
অনলাইন ডকুমেন্টেশন এবং ডাউনলোড গাইড ইনস্টলেশন, কনফিগারেশন এবং ROS 2 প্রকল্পের অনুশীলন নির্দেশ করে।
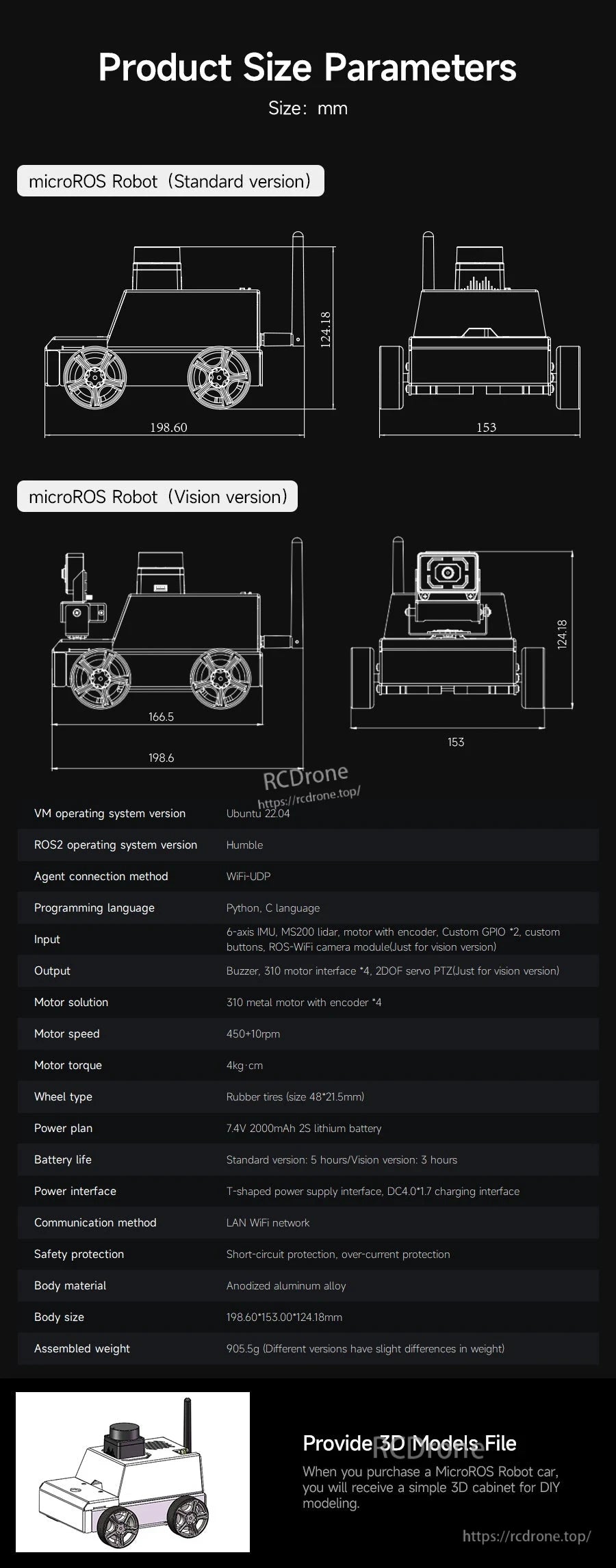
মাত্রার অঙ্কনগুলি DIY অংশ বা শ্রেণীকক্ষের ওয়ার্কবেঞ্চের সাথে সংযোজন এবং ইন্টিগ্রেশন পরিকল্পনা করতে সহায়তা করে।

অন্তর্ভুক্ত বিষয়গুলি সমাবেশিত চ্যাসি এবং মূল মডিউলগুলি, প্লাস ওয়্যারিং, সরঞ্জাম এবং সেটআপের জন্য ডকুমেন্টেশন কভার করে।
Related Collections










