








Yahboom RDK ROS2 রোবট কার মেকানাম হুইলসহ, RDK X3/X5 (4GB/8GB), MS200 TOF লাইডার
Yahboom RDK ROS2 রোবট কার মেকানাম হুইলসহ, RDK X3/X5 (4GB/8GB), MS200 TOF লাইডার
Yahboom
পিকআপের উপলভ্যতা লোড করা যায়নি
ওভারভিউ
RDK ROS2 রোবট কার একটি শিক্ষামূলক রোবট কার যা RDK X3/X5 ডেভেলপমেন্ট বোর্ডের উপর ভিত্তি করে তৈরি করা হয়েছে, যা মেকানাম চাকার সাথে নমনীয় সর্বদিকীয় গতিবিধির জন্য ডিজাইন করা হয়েছে। এটি ROS2 সিস্টেম ডেভেলপমেন্ট এবং SLAM ম্যাপিং নেভিগেশন সমর্থন করে এবং নেভিগেশন এবং বাধা এড়ানোর জন্য ক্যামেরা ভিশনকে TOF লিডারের সাথে সংযুক্ত করে। ডেভেলপমেন্ট Jupyter Lab Python প্রোগ্রামিং এবং রিয়েল-টাইম পারসেপশন এবং ইন্টারঅ্যাকশনের জন্য ডিপ লার্নিং অ্যালগরিদমের সাথে করা যেতে পারে।
ক্রয়ের আগে বা পরে প্রযুক্তিগত প্রশ্নের জন্য, যোগাযোগ করুন [email protected] or ভিজিট https://rcdrone.top/.
মূল বৈশিষ্ট্যসমূহ
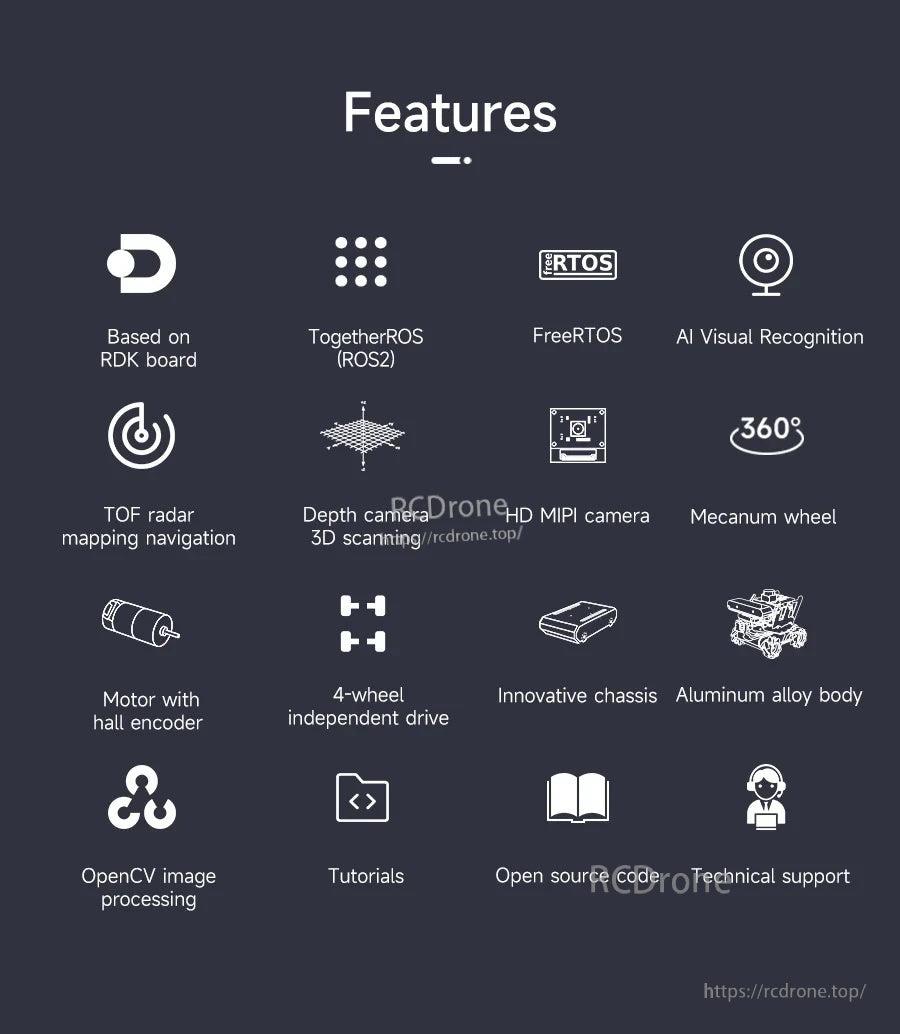
- RDK বোর্ডের উপর ভিত্তি করে; TogetherROS (ROS2); FreeRTOS
- এআই ভিজ্যুয়াল স্বীকৃতি; OpenCV ইমেজ প্রসেসিং
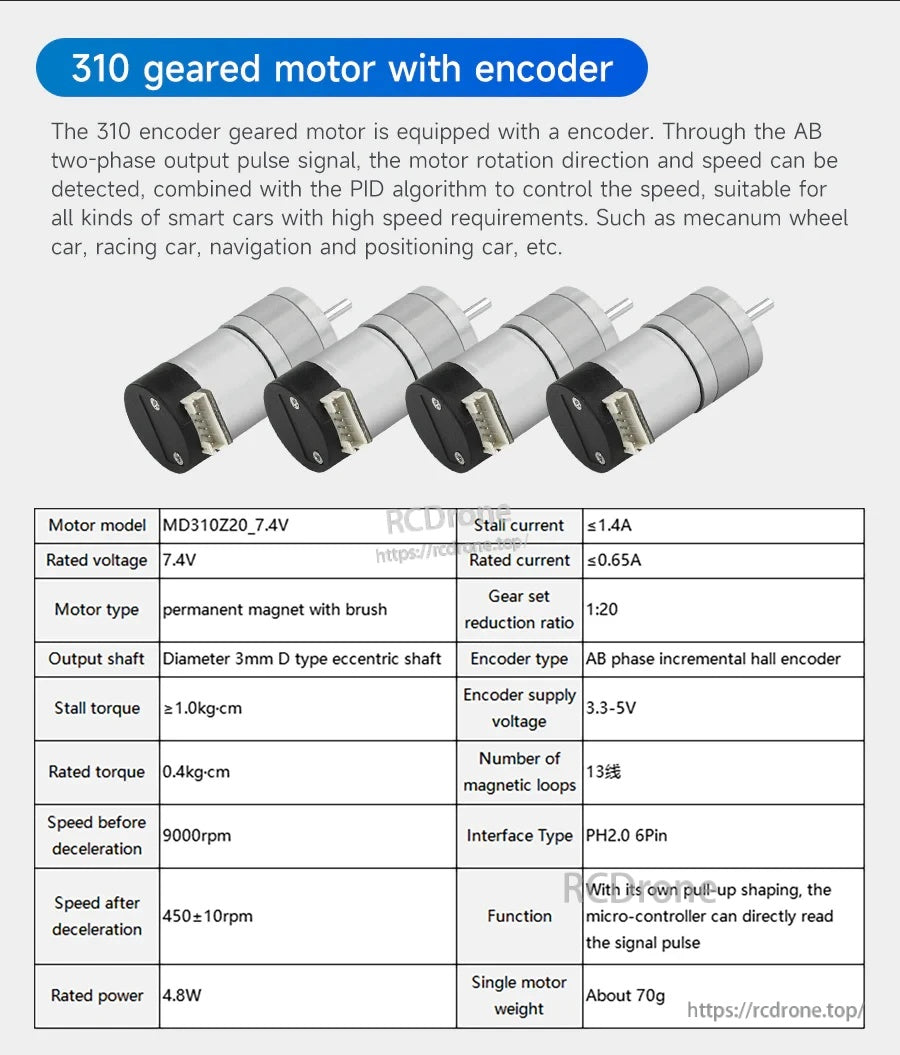
- মেকানাম চাকা চলাচল (৩৬০°); ৪-চাকা স্বাধীন ড্রাইভ; হল এনকোডার সহ মোটর
- TOF রাডার ম্যাপিং নেভিগেশন; গভীরতা ক্যামেরা ৩ডি স্ক্যানিং (কনফিগারেশন নির্ভরশীল)
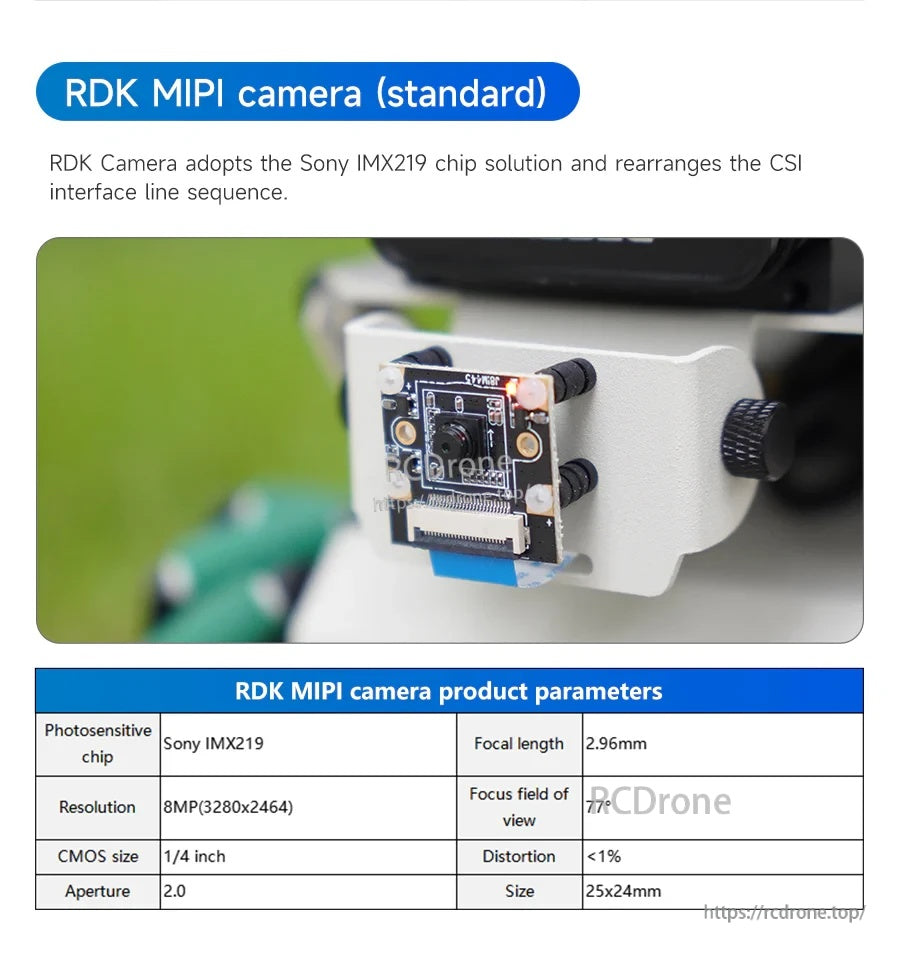
- এইচডি MIPI ক্যামেরা
- অ্যালুমিনিয়াম অ্যালয় বডি; উদ্ভাবনী চ্যাসিস; পরিপাটি অভ্যন্তরীণ তারের সাথে স্তূপিত কাঠামো
- বহুমুখী নিয়ন্ত্রণ পদ্ধতি: মোবাইল অ্যাপ, PS2 কন্ট্রোলার, কম্পিউটার কীবোর্ড, Jupyter Lab নিয়ন্ত্রণ, এবং ROS সিস্টেম নিয়ন্ত্রণ
- ম্যাপিং নেভিগেশন অ্যাপ iOS/Android সমর্থন করে এবং ROS1/ROS2 সমর্থন করে
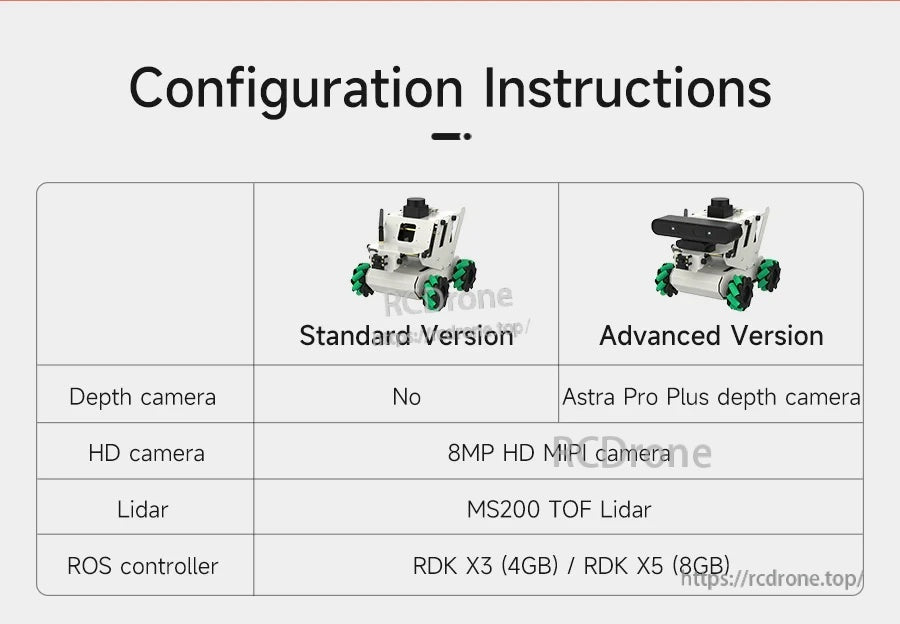
কনফিগারেশন বিকল্পসমূহ (তালিকাভুক্ত)
| স্ট্যান্ডার্ড সংস্করণ | গভীরতা ক্যামেরা: না |
| উন্নত সংস্করণ | গভীরতা ক্যামেরা: Astra Pro Plus গভীরতা ক্যামেরা |
| এইচডি ক্যামেরা | 8MP HD MIPI ক্যামেরা |
| লাইডার | MS200 TOF লাইডার |
| ROS কন্ট্রোলার | RDK X3 (4GB) / RDK X5 (8GB) |
ফাংশনসমূহ (পণ্য ফাংশন তালিকা থেকে)
লাইডার
- লাইডারের পরিচিতি এবং ব্যবহার
- লাইডার বাধা এড়ানো
- লাইডার ট্র্যাকিং
- লাইডার গার্ড
- পেট্রোল
- গ্যাম্যাপিং ম্যাপিং
- কার্টোগ্রাফার ম্যাপিং
- নেভিগেশন এবং এড়ানো
- অ্যাপ ম্যাপিং এবং নেভিগেশন
ডেপথ ক্যামেরা
- ডেপথ ক্যামেরা ব্যবহার
- ক্যামেরা অভ্যন্তরীণ রেফারেন্স
- ROS+OpenCV
- AR ভিশন
- রঙ ট্র্যাকিং
- KCF অবজেক্ট ট্র্যাকিং
MIPI ক্যামেরা
- ক্যামেরা ড্রাইভ
- রঙ HSV মান সমন্বয়
- রঙ সনাক্তকরণ
- রঙ ট্র্যাকিং
- রঙ অনুসরণ
- QR কোড স্বীকৃতি
- মুখ শনাক্তকরণ
- বস্তু শনাক্তকরণ
- ভিজ্যুয়াল লাইন পেট্রোল-OpenCV
- ভিজ্যুয়াল লাইন পেট্রোল-ডিপ লার্নিং
- মানব ট্র্যাকিং
- ইশারা নিয়ন্ত্রণ
ROS মাস্টার (RDK X3/X5)
- ভার্চুয়াল মেশিন
- লিনাক্স মৌলিক বিষয়সমূহ
- দূরবর্তী সংযোগ
- মাল্টি-মেশিন যোগাযোগ
- ডিভাইস আইডি বাঁধুন
- ইমেজ ব্যাক আপ
OpenCV
- OpenCV দিয়ে শুরু করা
- OpenCV জ্যামিতিক রূপান্তর
- OpenCV ইমেজ প্রসেসিং
- OpenCV ইমেজ সৌন্দর্যায়ন
- QR কোড তৈরি এবং স্বীকৃতি
রোবট কোর্স
- PID অ্যালগরিদম তত্ত্ব
- রোবট তথ্য প্রকাশ
- রোবট নিয়ন্ত্রণ
- রোবট অবস্থা অনুমান
- রোবট ক্যালিব্রেশন
- রোবট ট্রাজেক্টরি ট্র্যাকিং
- URDF মডেল
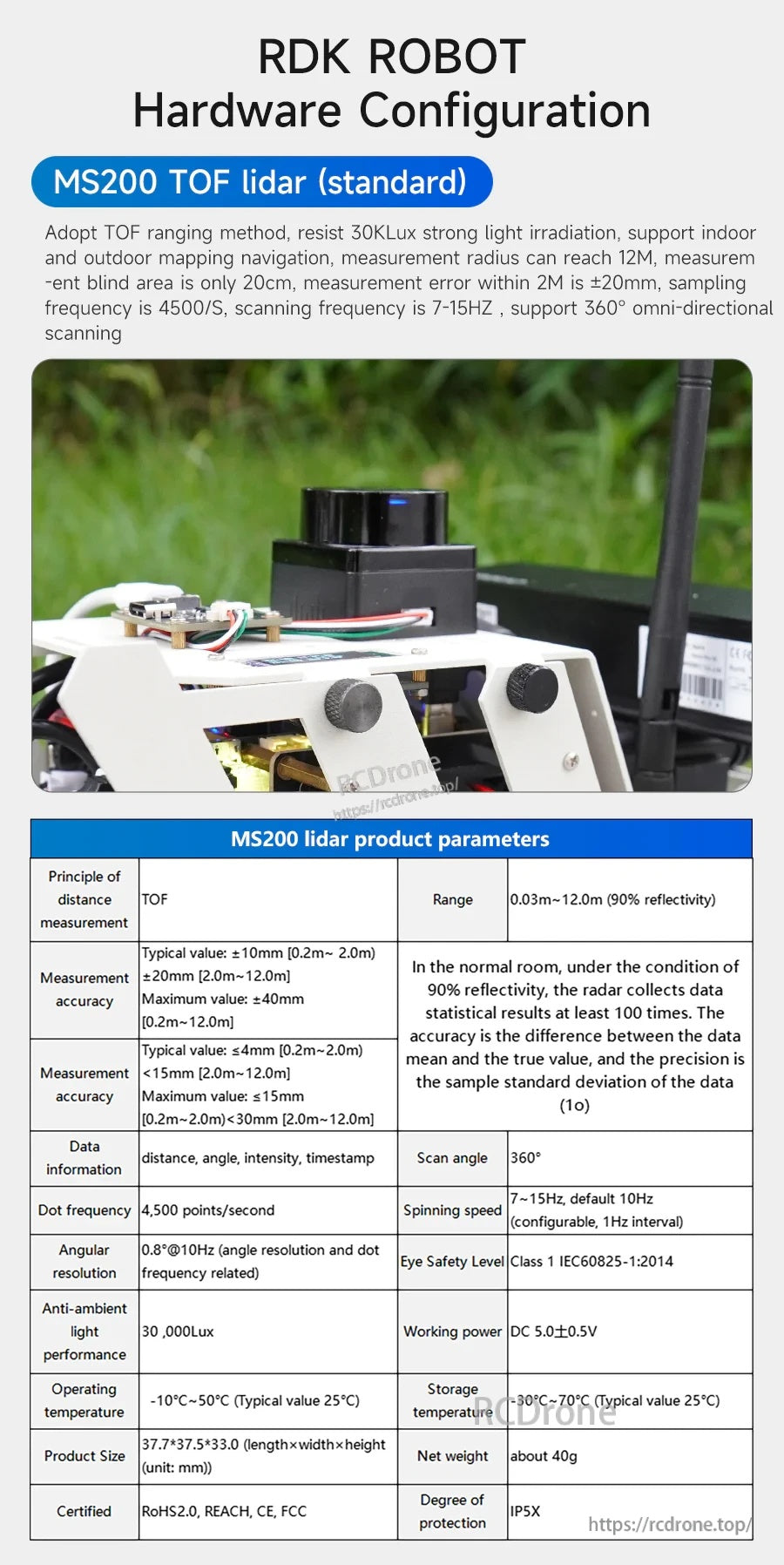
MS200 TOF লিডার (স্ট্যান্ডার্ড) স্পেসিফিকেশন
TOF রেঞ্জিং পদ্ধতি গ্রহণ করুন; 30KLux শক্তিশালী আলো বিকিরণ প্রতিরোধ করুন; ইনডোর এবং আউটডোর ম্যাপিং নেভিগেশন সমর্থন করুন; পরিমাপের ব্যাসার্ধ 12M পর্যন্ত পৌঁছাতে পারে; পরিমাপের ব্লাইন্ড এরিয়া মাত্র 20cm; 2M এর মধ্যে পরিমাপের ত্রুটি ±20mm; স্যাম্পলিং ফ্রিকোয়েন্সি 4500/S; স্ক্যানিং ফ্রিকোয়েন্সি 7-15HZ; 360° সর্বদিকীয় স্ক্যানিং সমর্থন করুন।
| দূরত্ব পরিমাপের নীতি | TOF |
| পরিসীমা | 0.03m~12.0m (90% প্রতিফলন ক্ষমতা) |
| পরিমাপের সঠিকতা | সাধারণ মান: ±10mm (0.2m~2.0m); ±20mm (2.0m~12.0m)। সর্বাধিক মান: ±40mm (0.2m~12.0m) |
| পরিমাপের সঠিকতা | সাধারণ মান: <=4mm (0.2m~2.0m); <15mm (2.0m~12.0m)। সর্বাধিক মান: <=15mm (0.2m~2.0m); <30mm (2.0m~12.0ম) |
| ডেটা তথ্য | দূরত্ব, কোণ, তীব্রতা, টাইমস্ট্যাম্প |
| স্ক্যান কোণ | ৩৬০° |
| ডট ফ্রিকোয়েন্সি | ৪,৫০০ পয়েন্ট/সেকেন্ড |
| স্পিনিং গতি | ৭~১৫Hz, ডিফল্ট ১০Hz (কনফিগারেবল, ১Hz ইন্টারভাল) |
| কোণীয় রেজোলিউশন | ০.৮°@১০Hz (কোণ রেজোলিউশন এবং ডট ফ্রিকোয়েন্সি সম্পর্কিত) |
| চোখের সুরক্ষা স্তর | ক্লাস ১ IEC60825-1:2014 |
| অ্যান্টি-অ্যাম্বিয়েন্ট লাইট পারফরম্যান্স | ৩০,০০০লাক্স |
| কর্মক্ষম শক্তি | DC ৫.০±০.5V |
| অপারেটিং তাপমাত্রা | -10°C~50°C (সাধারণ মান 25°C) |
| সংরক্ষণ তাপমাত্রা | -30°C~70°C (সাধারণ মান 25°C) |
| পণ্যের আকার | 37.7*37.5*33.0 (দৈর্ঘ্য×প্রস্থ×উচ্চতা), একক: mm |
| নেট ওজন | প্রায় 40g |
| প্রত্যয়িত | RoHS2.0, REACH, CE, FCC |
| সুরক্ষার ডিগ্রী | IP5X |
Astra Pro Plus Depth Camera (ঐচ্ছিক) স্পেসিফিকেশন
Astra Pro Plus গভীরতা ক্যামেরা পিচ কোণের ম্যানুয়াল সমন্বয় সমর্থন করে। এটি গভীরতা চিত্র ডেটা প্রক্রিয়াকরণ এবং 3D নেভিগেশন এবং ম্যাপিং সমর্থন করে।
| 3D প্রযুক্তি | ORBBECR মনোকুলার স্ট্রাকচার্ড লাইট |
| কাজের পরিসীমা | 0.6-8মি |
| নির্ভুলতা (গভীরতা) | 1মি: ±3মিমি |
| দৃষ্টিক্ষেত্র (FOV) (গভীরতা) | H 58.4° x V 45.8° |
| Resolution@frame rate (গভীরতা) | 640x480@30FPS; 320x240@30FPS; 160x120@30FPS |
| Resolution@Frame Rate (RGB) | 1920x1080@30FPS; 1280x720@30FPS; 640x480@30FPS |
| গভীর প্রক্রিয়াকরণ চিপ | MX6000 |
| নিকট সুরক্ষা | সমর্থন |
| দৃষ্টিক্ষেত্র (RGB) | H66.1° V40.2° |
| UVC (RGB) | সমর্থন |
| সমর্থিত অপারেটিং সিস্টেম | অ্যান্ড্রয়েড / লিনাক্স / উইন্ডোজ |
| ডেটা ইন্টারফেস | USB2.0 |
| আকার (মিমি) | 164.85*48.25*40 |
| মাইক্রোফোন | দুই-চ্যানেল স্টেরিও |
| বিদ্যুৎ খরচ | <2.5W |
| নিরাপত্তা | Class1 লেজার |
| অপারেটিং তাপমাত্রা | 10°C-40°C |
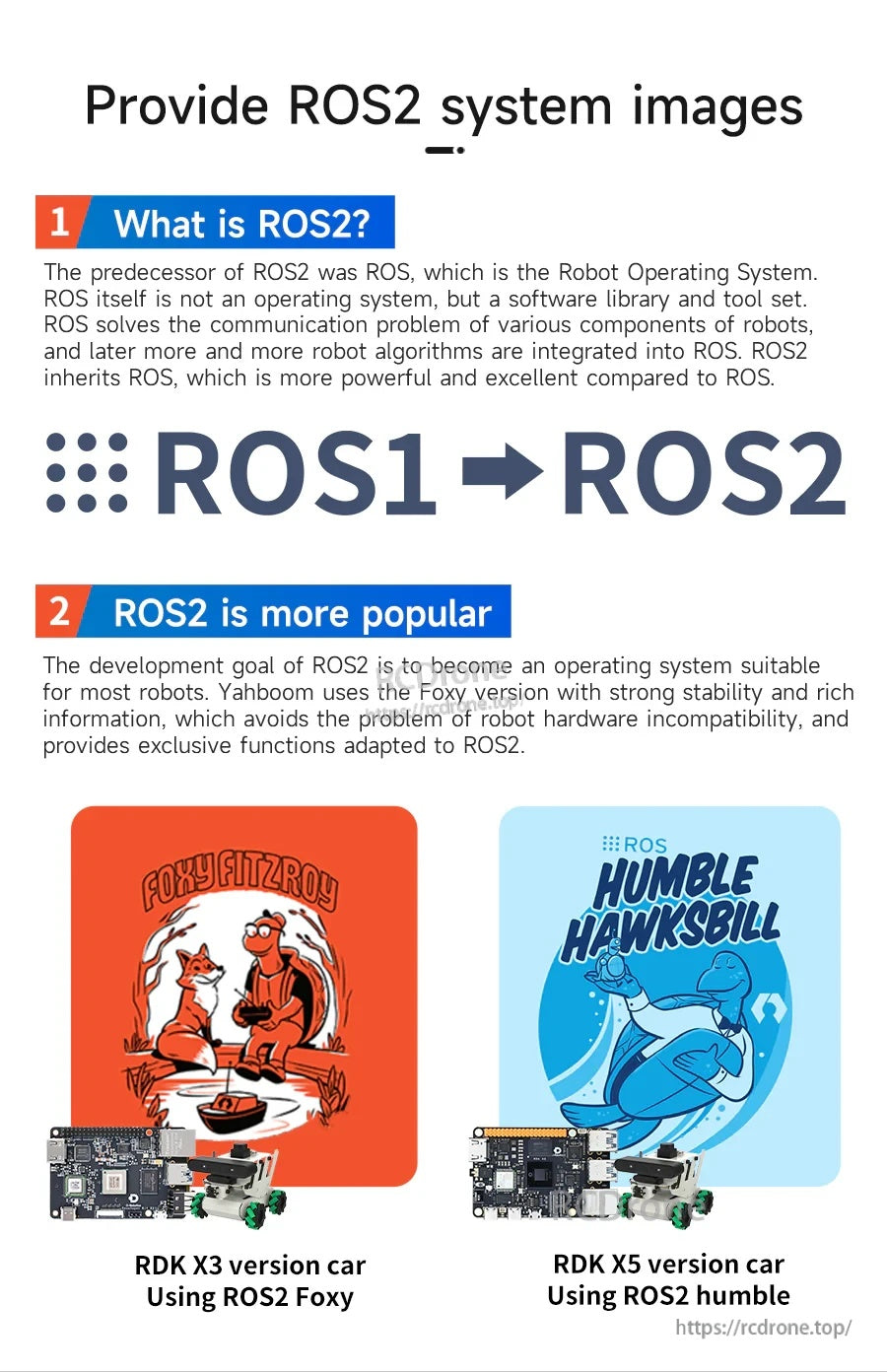
ROS2 সংস্করণ (সিস্টেম ইমেজ)
- RDK X3 সংস্করণ গাড়ি: ROS2 Foxy ব্যবহার করছে
- RDK X5 সংস্করণ গাড়ি: ROS2 humble ব্যবহার করছে
ভিডিও
ম্যানুয়াল
টিউটোরিয়াল লিঙ্ক: http://www.yahboom.net/study/RDK-X3-Robot
বিস্তারিত
RDK X3/X5 প্ল্যাটফর্মে নির্মিত, Yahboom RDK ROS2 রোবটটি SLAM শেখা এবং সর্বদিকমুখী মেকানাম গতিবিধির জন্য ডিজাইন করা হয়েছে।
মূল ক্ষমতাগুলির মধ্যে রয়েছে TogetherROS (ROS2), OpenCV ভিশন, TOF রাডার ম্যাপিং নেভিগেশন, এবং একটি টেকসই অ্যালুমিনিয়াম অ্যালয় চেসিস।
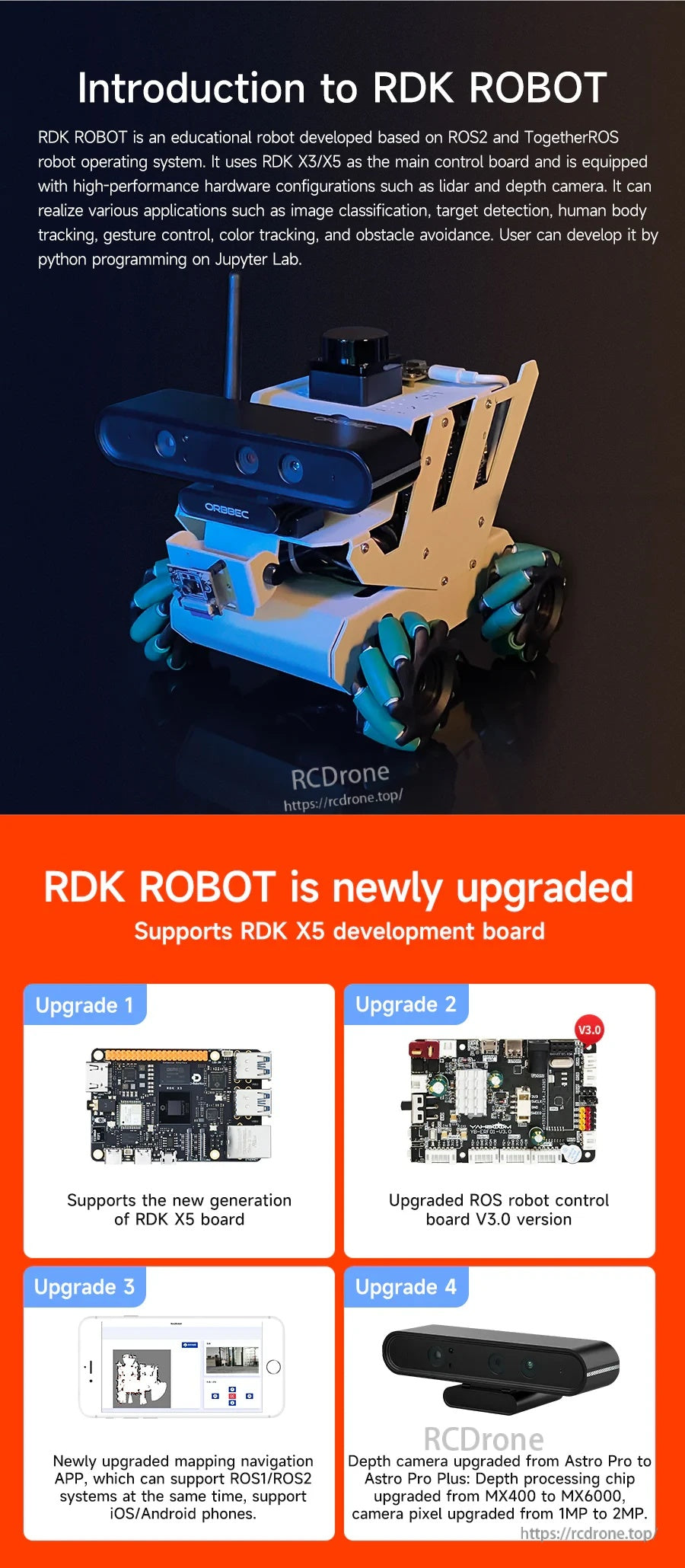
বহু আপগ্রেড পথ RDK X3 এবং RDK X5 উভয় কনফিগারেশনের জন্য রোবোটিক্স উন্নয়ন এবং সম্প্রসারণ সমর্থন করে।
স্ট্যান্ডার্ড কিট নির্বাচন করুন অথবা অ্যাডভান্সড ভার্সনে আপগ্রেড করুন একটি অ্যাস্ট্রা প্রো প্লাস ডেপথ ক্যামেরার সাথে, একই লিডার এবং এইচডি এমআইপিআই ক্যামেরা ভিত্তি বজায় রেখে।
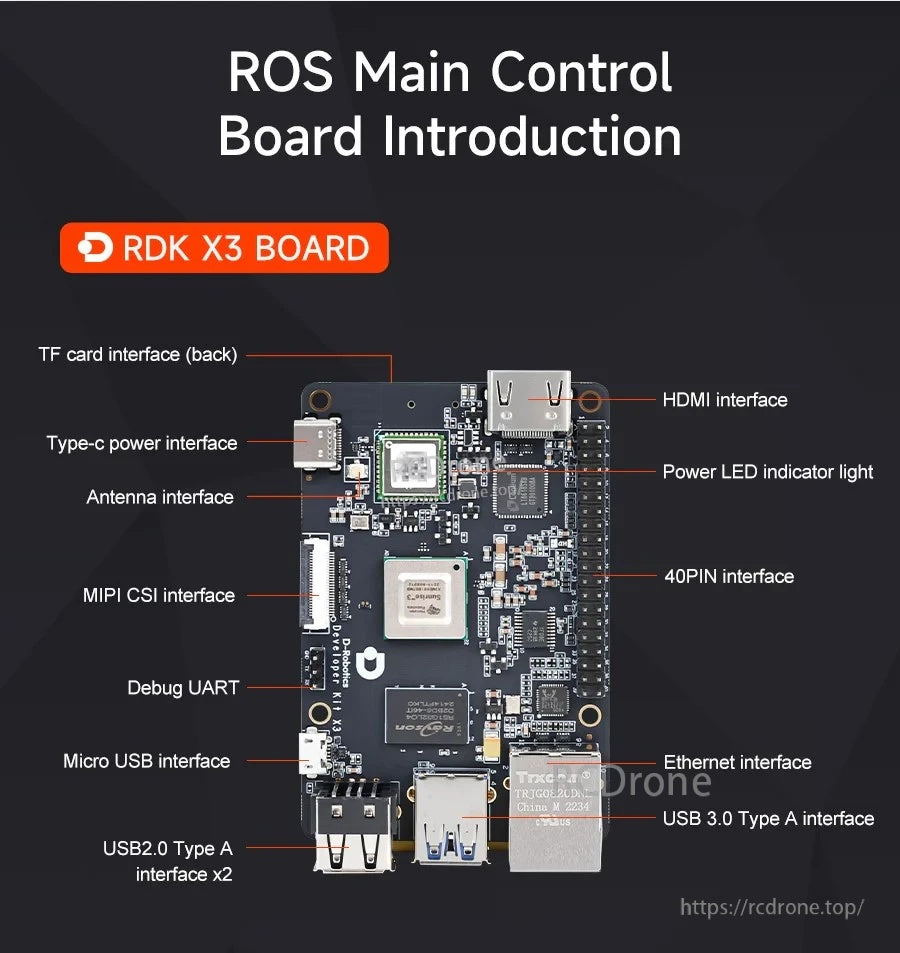
I/O-সমৃদ্ধ RDK X3 কন্ট্রোল বোর্ড HDMI, ইথারনেট, USB, CSI ক্যামেরা সংযোগ এবং রোবোটিক্স ইন্টিগ্রেশনের জন্য একটি ৪০-পিন ইন্টারফেস সমর্থন করে।
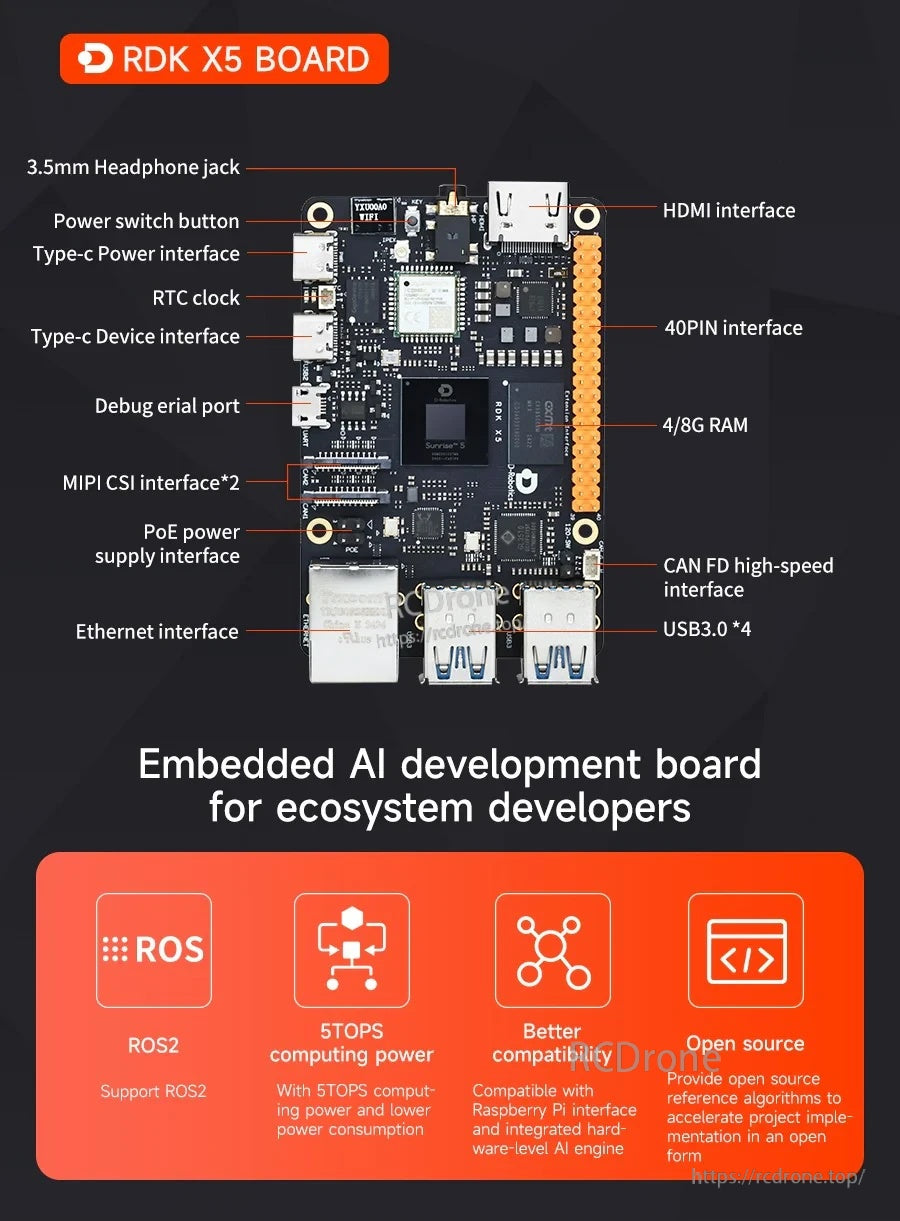
RDK X5 ROS2 প্রকল্পগুলির জন্য সম্প্রসারিত সংযোগ এবং কর্মক্ষমতা বিকল্পগুলি যোগ করে, পেরিফেরালগুলির জন্য উচ্চ-গতির ইন্টারফেস সহ।
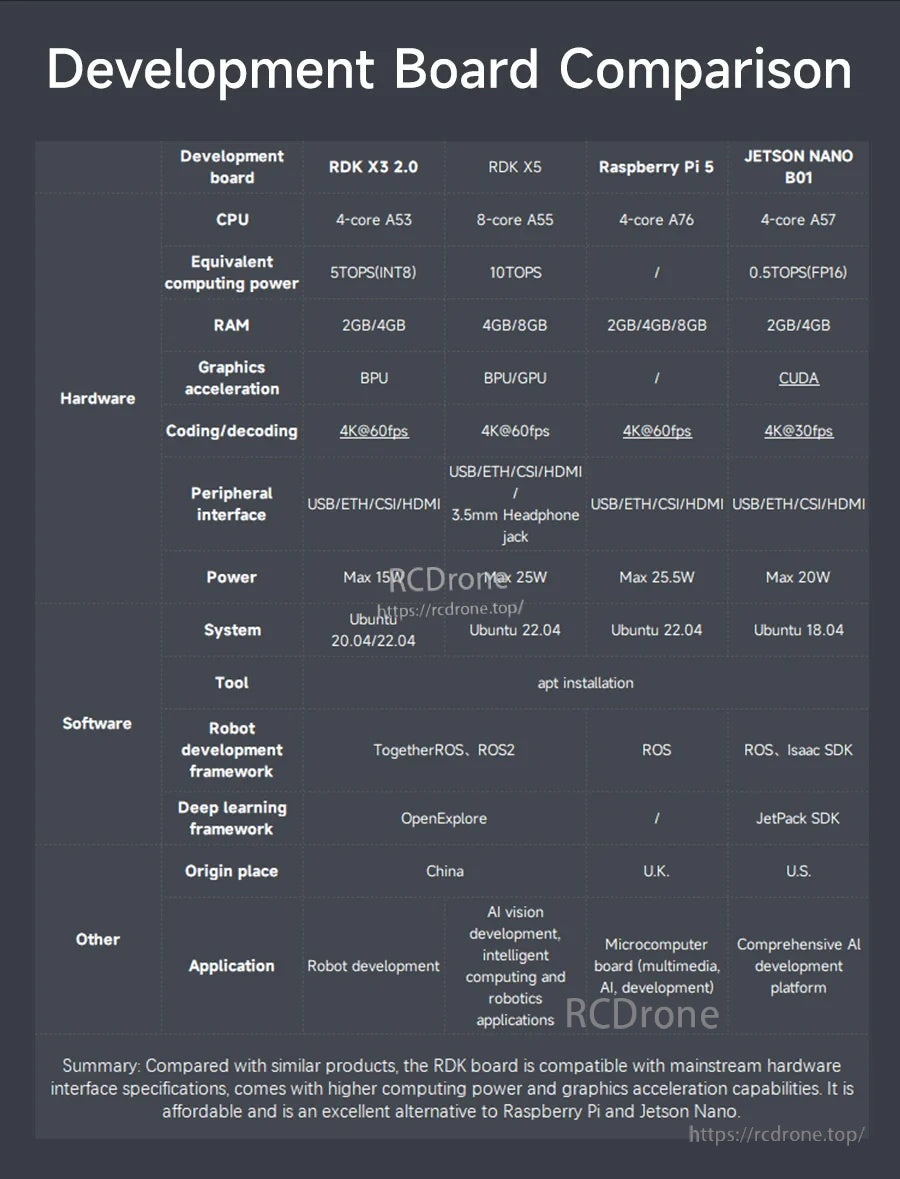
একটি দ্রুত তুলনা কন্ট্রোলারকে আপনার কাজের সাথে মেলাতে সাহায্য করে, মৌলিক ROS শেখা থেকে উচ্চ-চাহিদার AI পারসেপশন কাজ পর্যন্ত।
প্রিবিল্ট ROS2 সিস্টেম ইমেজগুলি সেটআপকে সহজ করে, RDK X3 এবং RDK X5 এর জন্য সাধারণ ROS2 রিলিজের সাথে সামঞ্জস্যপূর্ণ বিকল্পগুলি সহ।

MS200 TOF লিডার বাধা এড়ানোর আচরণ সক্ষম করে এবং Gmapping এবং কার্টোগ্রাফারের মতো ম্যাপিং ওয়ার্কফ্লো সমর্থন করে।
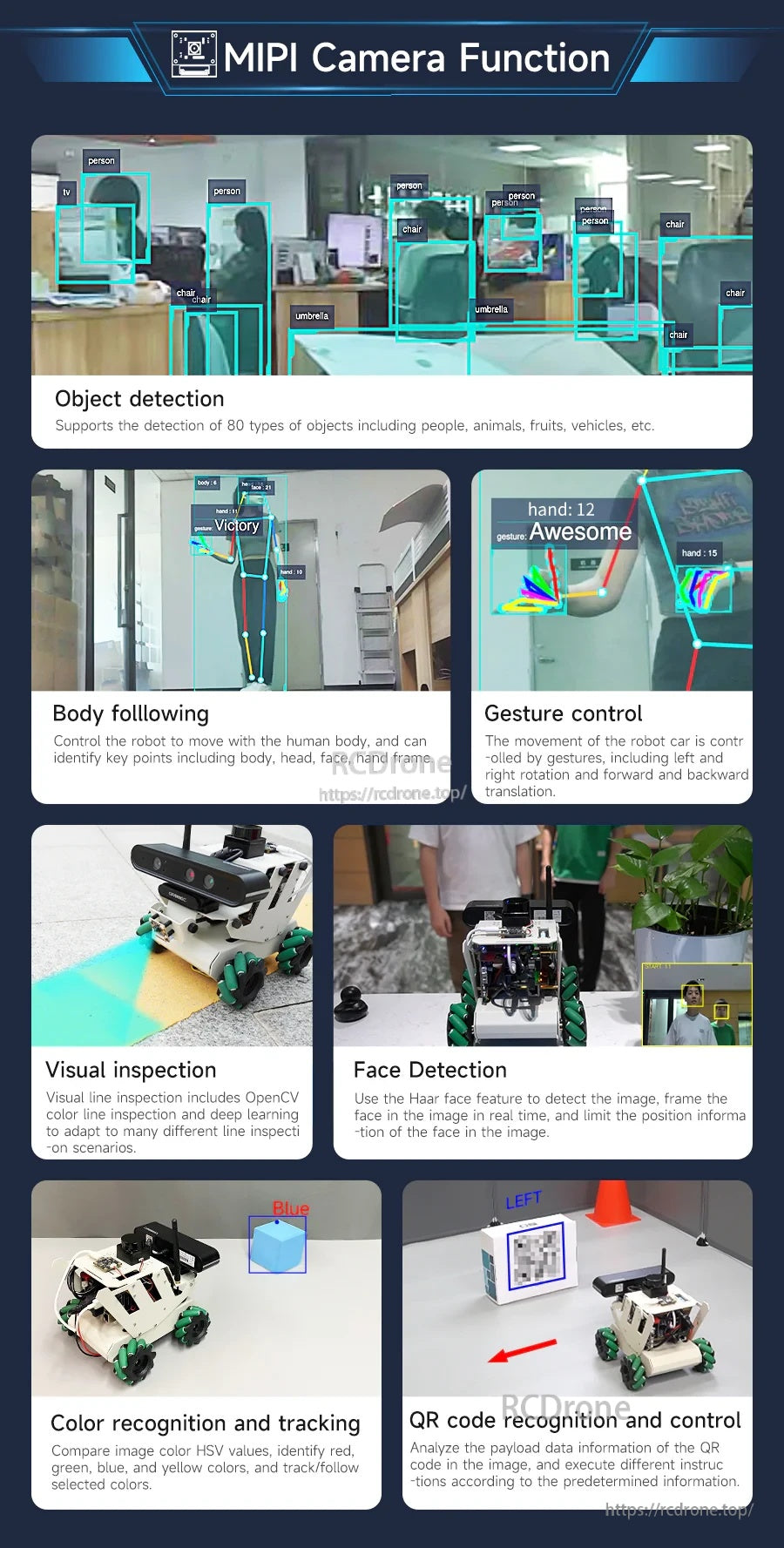
ভিশন বৈশিষ্ট্যগুলি সনাক্তকরণ, ট্র্যাকিং, অঙ্গভঙ্গি এবং QR স্বীকৃতি কভার করে ইন্টারেক্টিভ ROS2 উপলব্ধি ডেমো সমর্থন করার জন্য।

ঐচ্ছিক গভীরতা সংবেদন 3D ম্যাপিং এবং ট্র্যাকিং প্রসারিত করে, যখন একাধিক নিয়ন্ত্রণ পদ্ধতি অ্যাপ, রকার কন্ট্রোলার এবং কীবোর্ড কভার করে।

একটি একীভূত ফাংশন তালিকা লিডার নেভিগেশন, ক্যামেরা ভিশন মডিউল, ROS মাস্টার সেটআপ এবং অন্তর্ভুক্ত শেখার পাঠ্যক্রমের রূপরেখা দেয়।
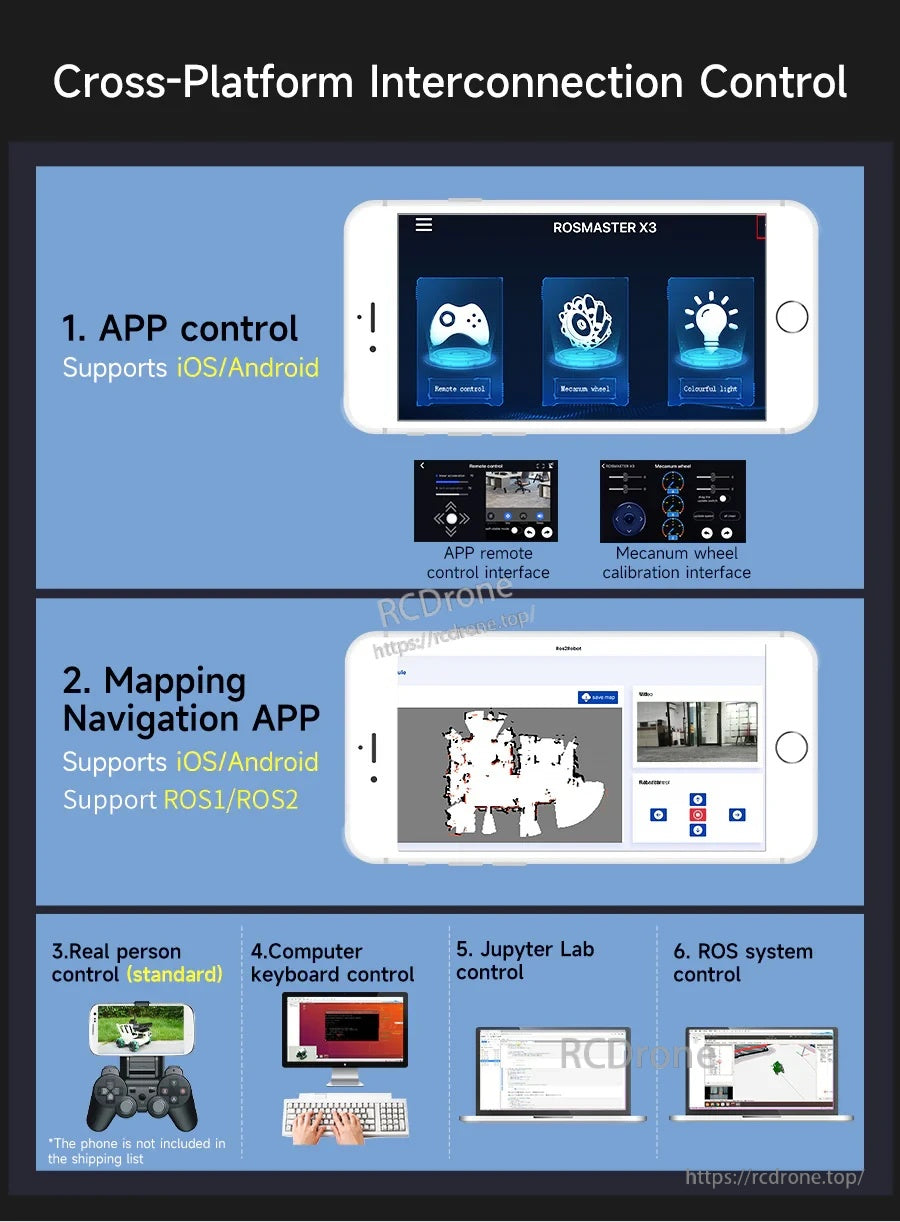
মোবাইল অ্যাপ, কম্পিউটার কীবোর্ড, JupyterLab, বা সরাসরি ROS সিস্টেমের মাধ্যমে নমনীয় কর্মপ্রবাহের জন্য রোবট নিয়ন্ত্রণ করুন।

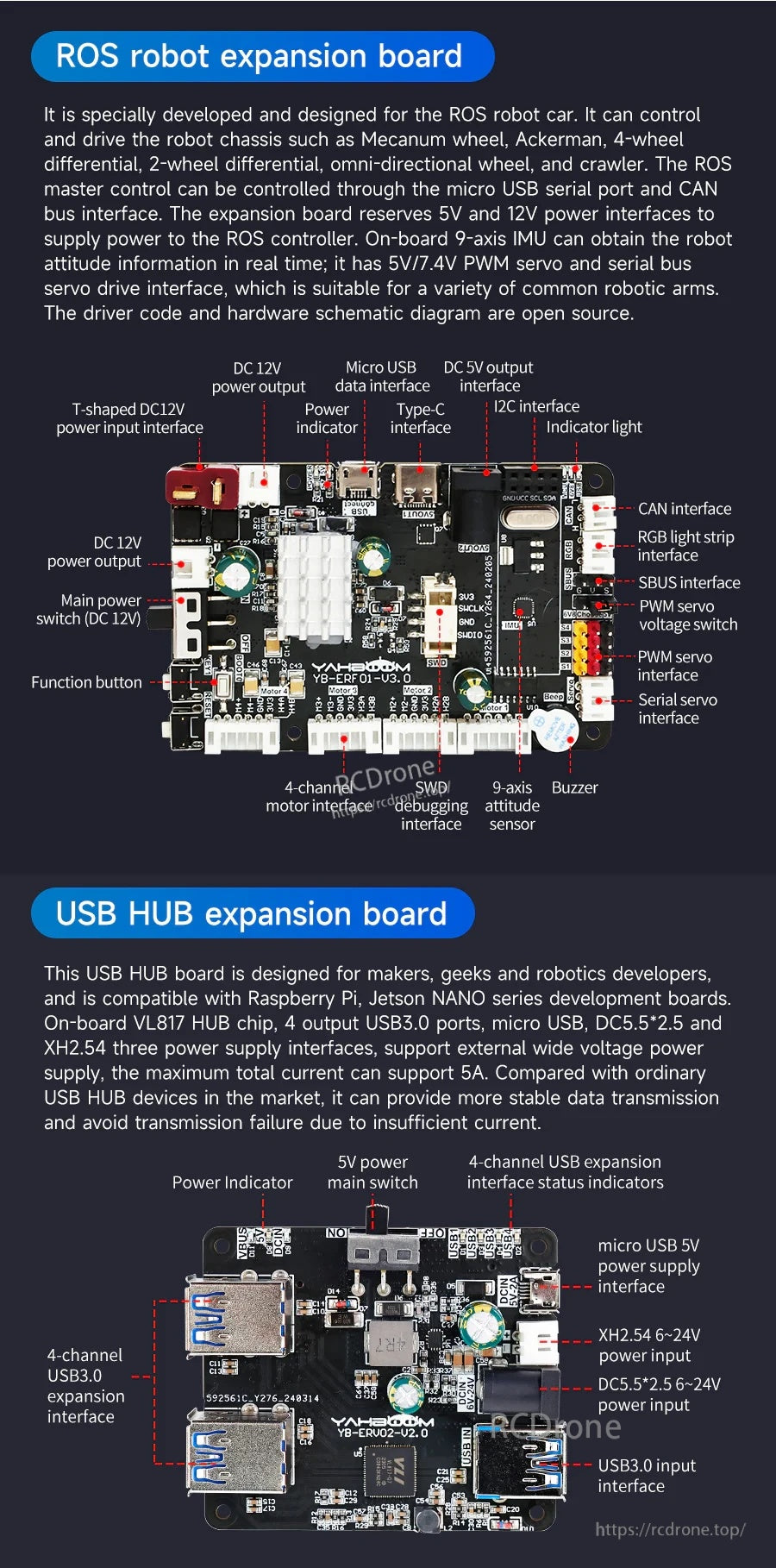
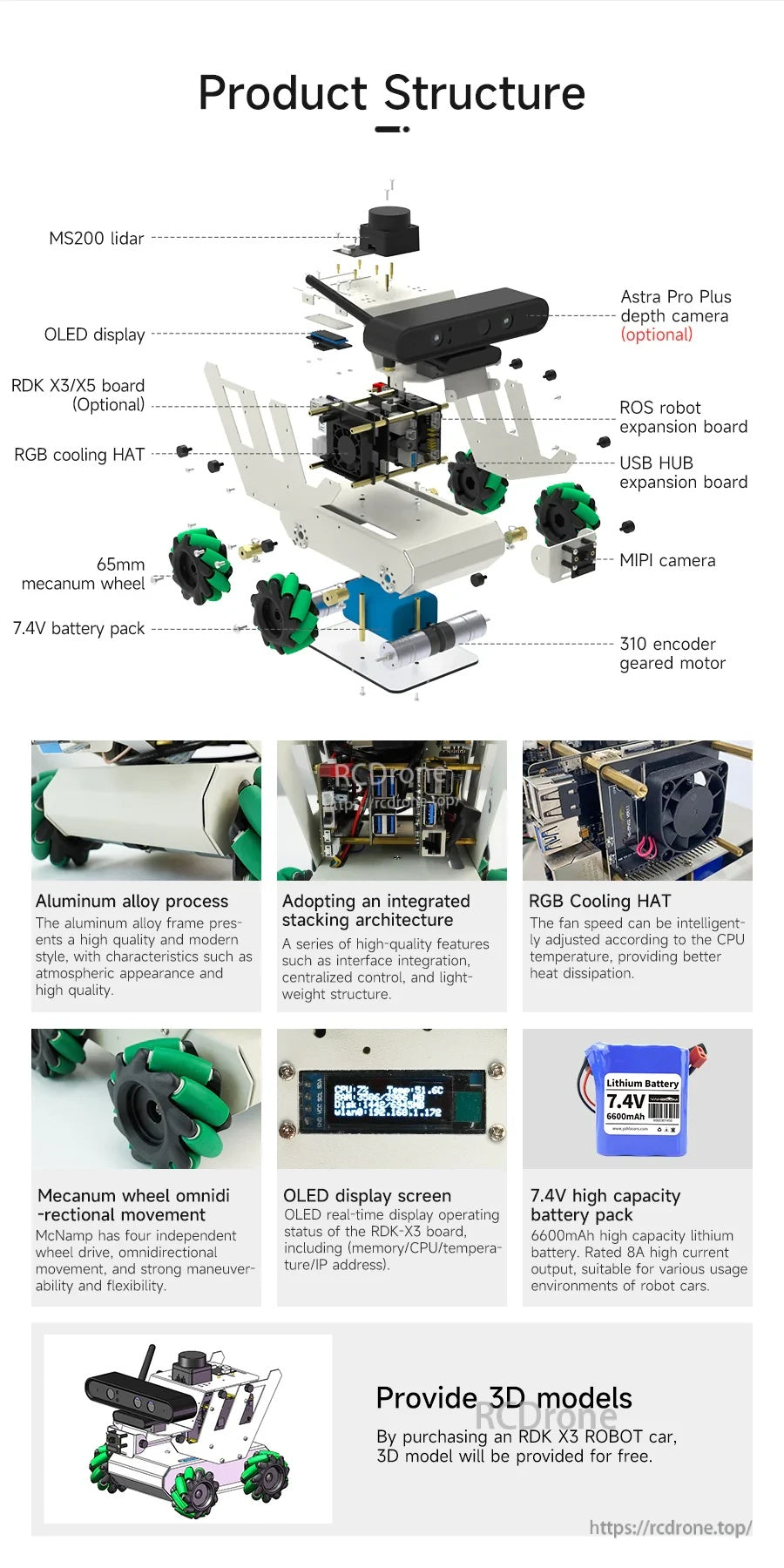
Yahboom RDK ROS2 রোবট স্ট্যাক একটি RDK কন্ট্রোল বোর্ড, ROS এক্সপ্যানশন বোর্ড, MIPI ক্যামেরা, লিডার এবং একটি 7.4V ব্যাটারি প্যাককে মেকানাম চাকার সাথে স্তরযুক্ত চ্যাসিসে একত্রিত করে।
Yahboom RDK ROS2 রোবট টিউটোরিয়ালগুলি কোর্স ফোল্ডার এবং RDK-X3 এবং RDK-X5 সেটআপ এবং ডেভেলপমেন্টের জন্য সরাসরি অধ্যয়ন লিঙ্ক সহ সংগঠিত করা হয়েছে।
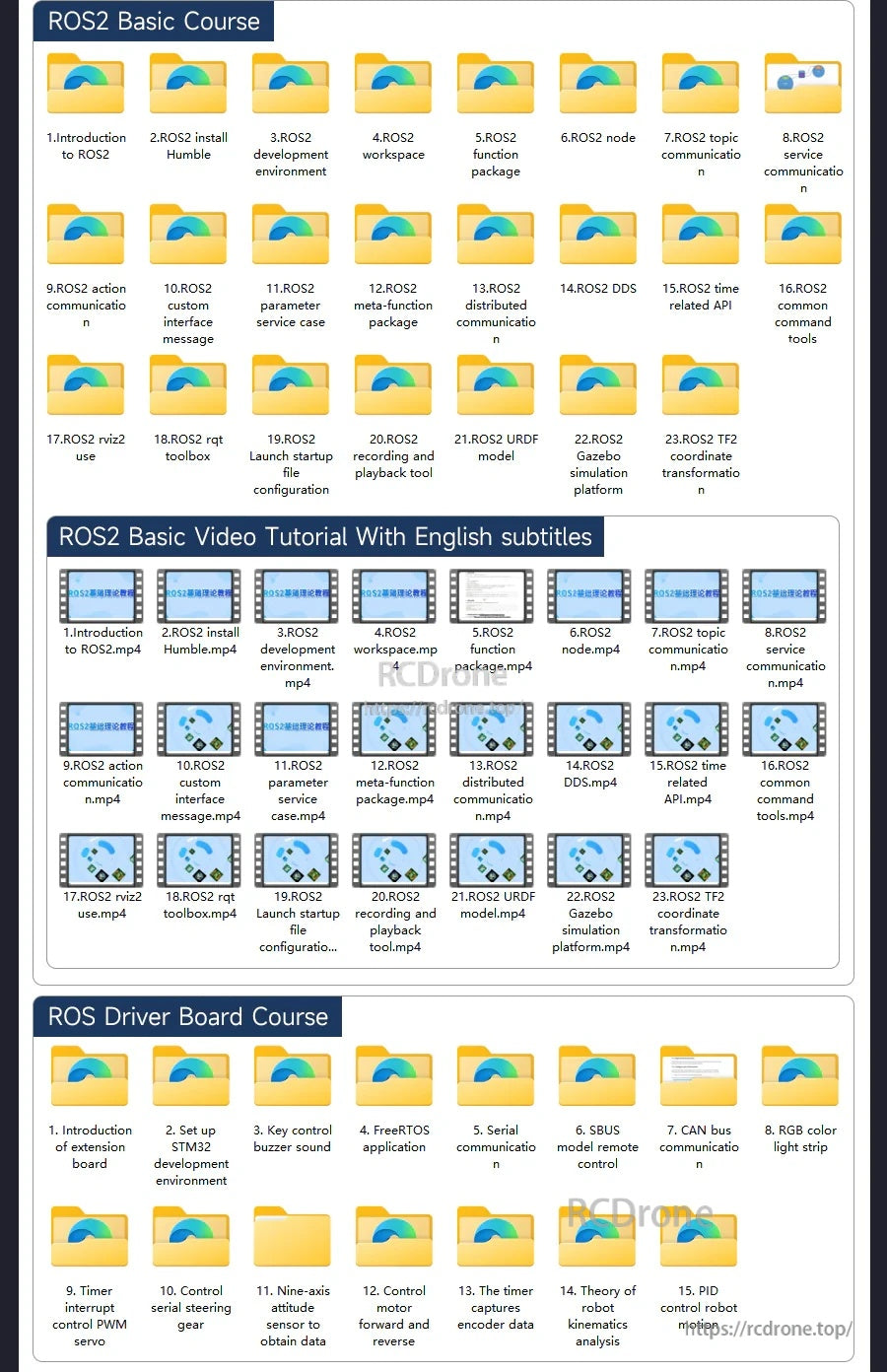
Yahboom RDK ROS2 শিক্ষণ সামগ্রীতে একটি ROS2 মৌলিক কোর্স এবং ইংরেজি সাবটাইটেল সহ ভিডিও টিউটোরিয়াল অন্তর্ভুক্ত রয়েছে, পাশাপাশি একটি ড্রাইভার বোর্ড কোর্স ধাপে ধাপে মডিউল সহ।
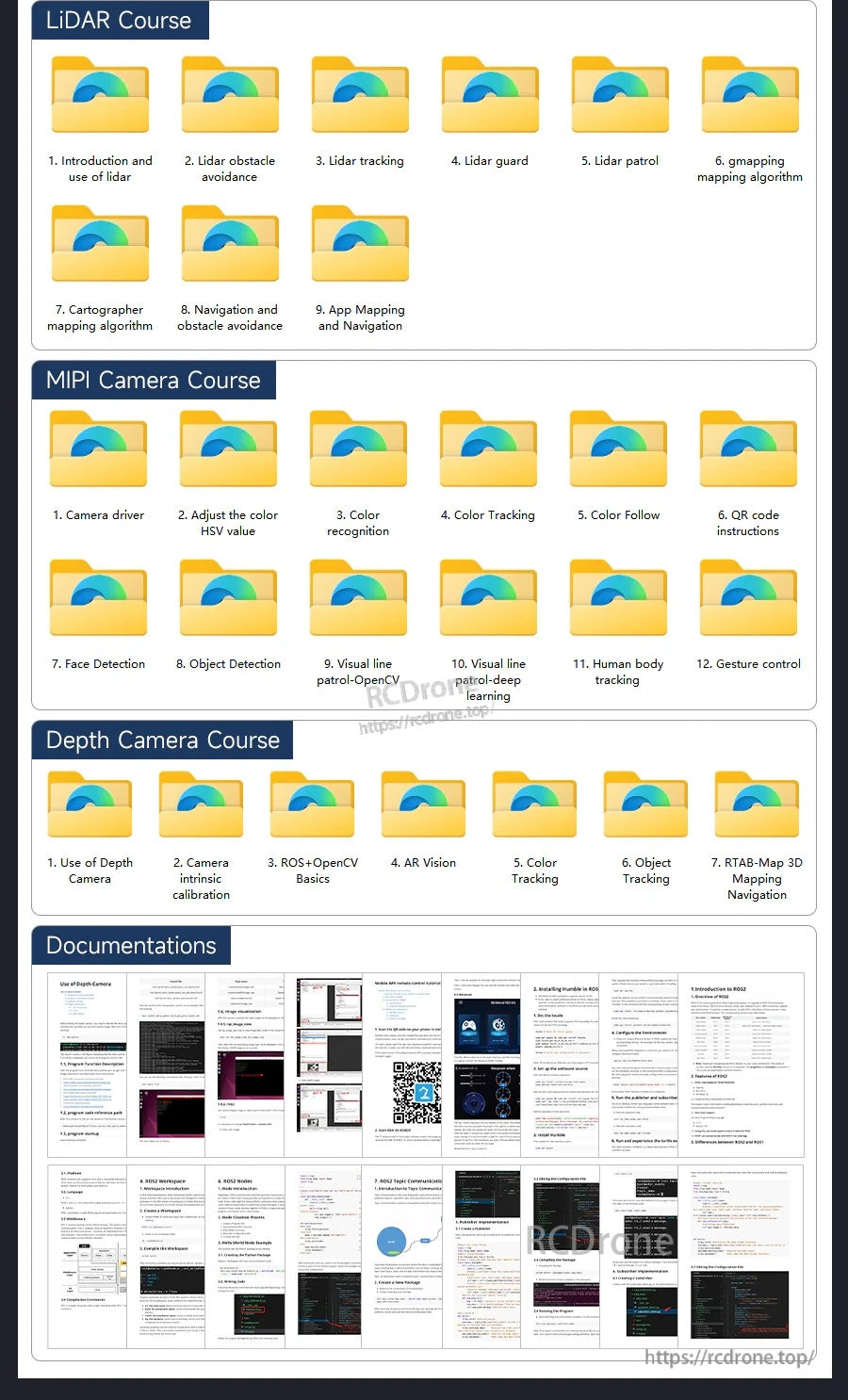
Yahboom RDK ROS2 রোবট কোর্স বান্ডেল LiDAR ম্যাপিং এবং নেভিগেশন প্লাস MIPI এবং গভীরতা ক্যামেরা ট্র্যাকিং, স্বীকৃতি, এবং ROS/OpenCV মৌলিক বিষয়গুলি কভার করে, সহায়ক ডকুমেন্টেশন সহ।
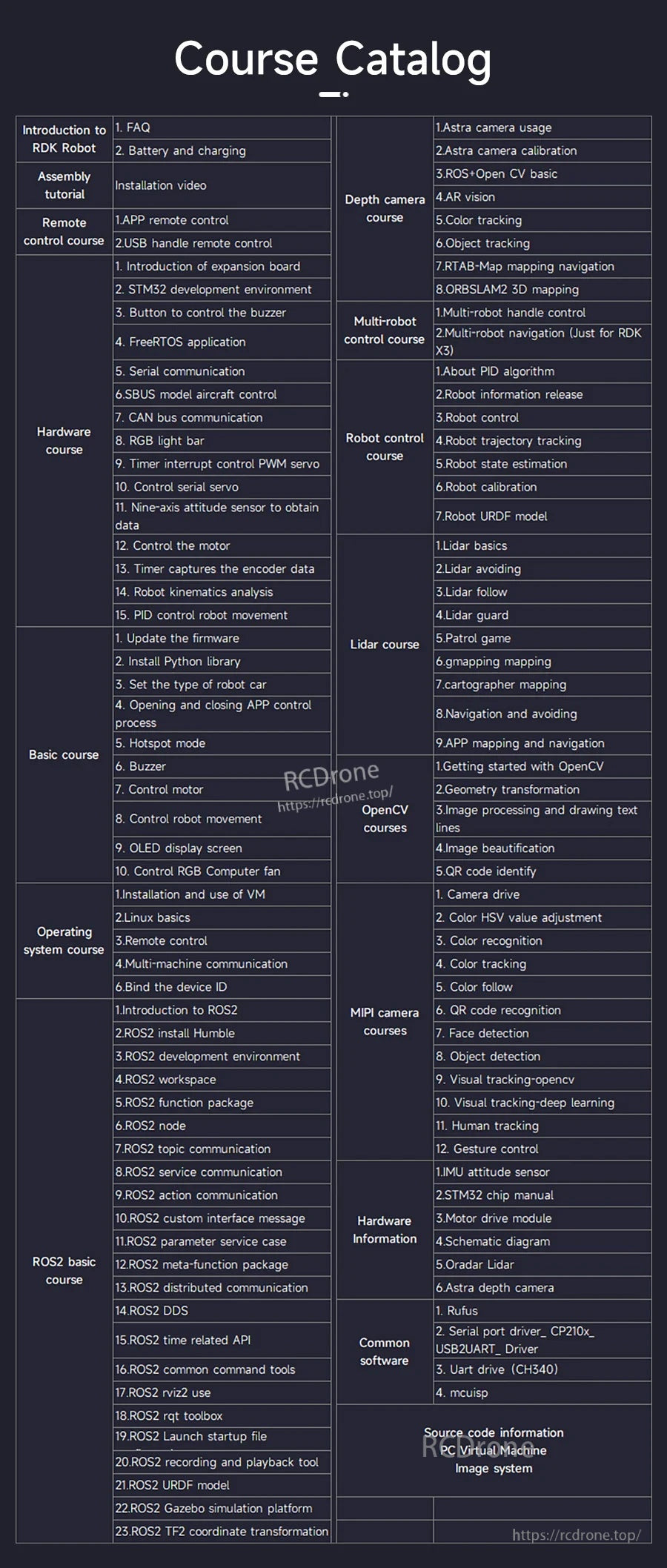
Yahboom RDK ROS2 রোবট কোর্স ক্যাটালগ সেটআপ, ROS2 মৌলিক বিষয়গুলি, ম্যাপিং এবং নেভিগেশন, প্লাস ক্যামেরা এবং ভিশন মডিউল কভার করে।

Yahboom RDK ROS2 রোবট প্ল্যাটফর্মটি একাধিক স্ট্যান্ডার্ড এবং উন্নত স্টাইল কনফিগারেশনে মেকানাম চাকা সহ সর্বদিকীয় গতির জন্য উপলব্ধ।
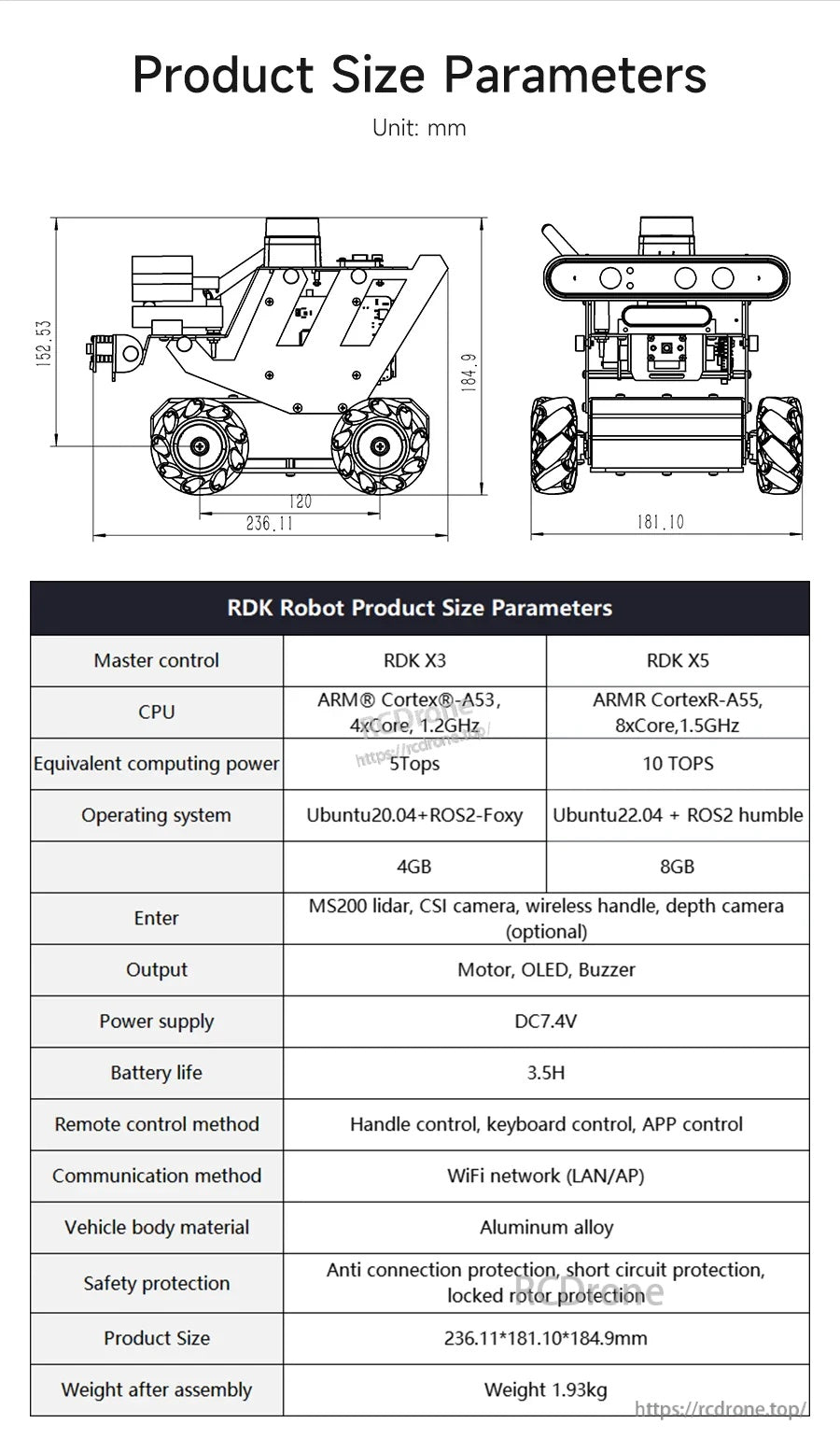
Yahboom RDK ROS2 রোবট প্যারামিটার তালিকা উবুন্টু + ROS2 অপশন (Foxy/Humble), 4GB RAM, DC 7.4V পাওয়ার, এবং 236.11 × 181.10 × 184.9 মিমি ফুটপ্রিন্ট।

Yahboom RDK X3 ROS2 রোবট কিটে একটি মেকানাম-হুইল চ্যাসিস, ক্যামেরা মডিউল, এক্সপ্যানশন বোর্ড, অ্যান্টেনা এবং সংযোগের জন্য তারের আনুষাঙ্গিক অন্তর্ভুক্ত রয়েছে।
Related Collections











