ZED-F9P-01B-01 RTK GNSS Empfängerplatine, USB-C, UART2 RTCM3, SMA & U.FL Antenne, Pixhawk GH1.25-6P
ZED-F9P-01B-01 RTK GNSS Empfängerplatine, USB-C, UART2 RTCM3, SMA & U.FL Antenne, Pixhawk GH1.25-6P
RCDrone
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
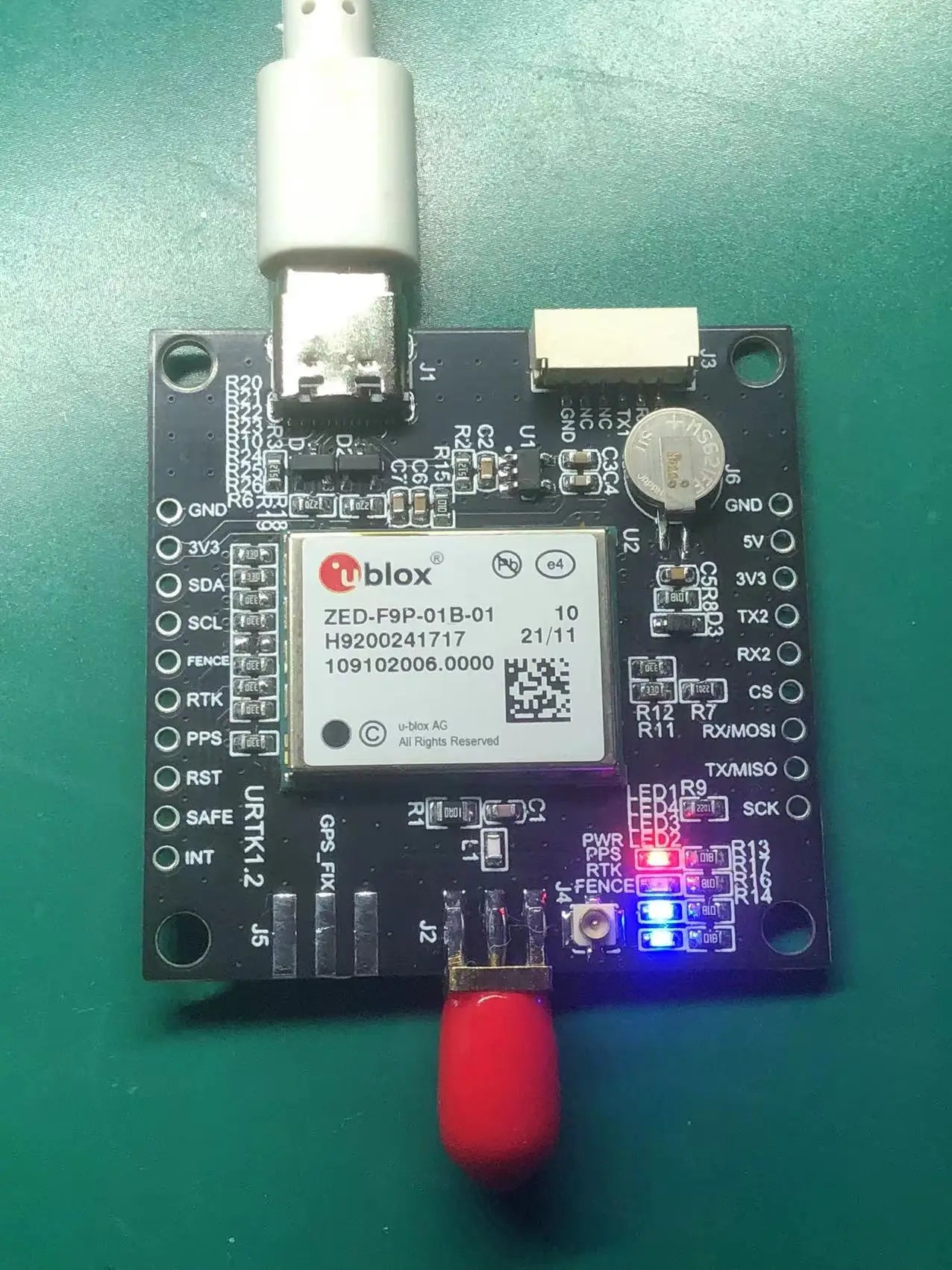
Dieses GNSS-Empfängerboard basiert auf dem u-blox ZED-F9P-01B-01 Modul und bietet Unterstützung für RTK-differenzielle Positionierung mit USB-C, UART/SPI-Pins und dualen Antennenanschlussoptionen zur Integration in Robotik-, Autopilot- und Navigationssysteme.
Hauptmerkmale
- USB-Schnittstelle: USB Typ-C Verbindung zur Konfiguration mit u-center und zur schnellen Anzeige von NMEA-Sätzen; wird als serieller COM-Port unabhängig von der UART-Schnittstelle aufgelistet.
- Stromversorgungsoptionen: Onboard 3.3V Regler wandelt 5V USB in 3.3V um, die vom Modul benötigt werden; unterstützt externe 5V-Eingabe oder direkte 3.3V-Versorgung.
- Empfehlung für rauschfreies 3.3V: Bei direkter Versorgung mit 3.3V wird eine saubere Versorgung mit minimalem Rauschen empfohlen (weniger als 50mV PVP-Rippel wird als ideal für präzise Positionierung angegeben).
- UART/SPI-Sharing: Klassische serielle Pins sind verfügbar, werden jedoch mit SPI-Pins geteilt; standardmäßig sind die UART-Pins aktiviert.DSEL-Jumper auf der Rückseite des Boards sollte offen sein.
- RTCM3-Verarbeitung auf UART2: Ein zweiter serieller Port (UART2) wird hauptsächlich für RTCM3-Korrekturdaten verwendet; standardmäßig empfängt und analysiert er automatisch eingehende RTCM3, um den RTK-Modus zu aktivieren. Im Basisstationsmodus gibt UART2 RTCM3-Korrekturdaten aus.
- Autopilot-Anschluss: GH1.25-6P (Pixhawk JST-GH-Standard) zum Anschluss an einen Pixhawk-Autopiloten und/oder zur Stromversorgung des Boards.
- Antenne-Anschlüsse: Zwei Antennenanschlüsse sind vorhanden: SMA (äußere Schraube, internes Loch) und U.FL (IPEX); beide können verwendet werden.
- Status-LEDs: Vier Status-LEDs (Strom, PPS, RTK, FENCE) zur Anzeige des Systems/RTK/Geofencing.
Technische Daten
| GNSS-Modul (Modulbezeichnung) | u-blox ZED-F9P-01B-01 |
| Platine Markierung (sichtbar auf dem Platinenfoto) | ZED-F9P-01B-00 |
| USB | USB Typ-C; wird als serieller COM-Port aufgelistet (unabhängig von UART) |
| Seriell / SPI | UART-Pins werden mit SPI-Pins geteilt; UART standardmäßig aktiviert; DSEL-Jumper auf der Rückseite sollte offen sein |
| UART-Pin-Richtung (geteilt mit SPI) | TX/MISO = Ausgang vom ZED-F9P; RX/MOSI = RX in ZED-F9P |
| Zweiter serieller Port | UART2 (hauptsächlich für RTCM3-Korrekturdaten; kann RTCM3 im Basisstationsmodus ausgeben) |
| Stromregelung | 3,3V-Regler bereitgestellt, um 5V USB auf 3.3V, die vom Modul benötigt werden |
| Stromversorgung Optionen (angegeben) | USB 5V, extern 5V oder direkte 3.3V Versorgung |
| 3.3V Versorgungsgeräusch Hinweis (angegeben) | Weniger als 50mV PVP Ripple wird als ideal angegeben, wenn 3.3V direkt versorgt werden |
| 3.3V Reglerfähigkeit (angegeben) | 600mA von 5V Eingang |
| USB-C Stromfähigkeit (angegeben) | Fähig, 2A zu liefern |
| J3 Anschluss | GH1.25-6P (Pixhawk JST-GH Standard) |
| J3 Pinbelegung (Pixhawk Standard) | 1: 5V_IN; 2: ZED-F9P UART1 Empfang (3.3V Niveau); 3: ZED-F9P UART1 TX (3.3V Niveau); 4,5: Nicht verbunden; 6: Masse |
| LED-Anzeigen (beschrieben) | Strom (rot, wenn 3.3V aktiv über USB oder Qwiic-Bus); PPS (gelb, einmal pro Sekunde nach Positionssperre); RTK (blau: an nach Stromversorgung, blinkt nach Empfang von RTCM-Daten, schaltet sich nach RTK-Fix aus); FENCE (konfigurierbar für Geofencing-Anwendungen) |
| Antenna-Schnittstellen | SMA und U.FL (IPEX); jede Schnittstelle ist akzeptabel |
| Header-Bezeichnungen (Siebdruck, linke Seite) | GND, 3V3, SDA, SCL, FENCE, RTK, PPS, RST, SAFE, INT |
| Header-Bezeichnungen (Siebdruck, rechte Seite) | GND, 5V, 3V3, TX2, RX2, CS, RX/MOSI, TX/MISO, SCK |
Anwendungen
- RTK GNSS-Positionierung für Drohnen, UGVs, Robotik und Navigationsprototypen
- Pixhawk/Autopilot GNSS-Integration über JST-GH (GH1.25-6P) serielle Verbindung
- RTCM3-basierte RTK-Setups, die UART2 für Korrekturdatenverbindungen (Funk oder kabelgebunden) verwenden
Bei Fragen zur Kompatibilität (UART/SPI-Auswahl, RTCM3 Verkabelung, Antennen oder Integration) wenden Sie sich bitte an den Support unter https://rcdrone.top/ oder per E-Mail an [email protected].
Details

Die ZED-F9P Empfängerplatine kombiniert eine USB-C-Verbindung mit klar gekennzeichneten I/O-Pins und einem U.FL Antennenanschluss für eine unkomplizierte Integration.
Die USB‑C-Schnittstelle verbindet die ZED‑F9P mit u‑center oder einem Raspberry Pi als unabhängigen seriellen COM-Port, mit einer internen 3,3V-Regelung von 5V USB-Strom.
Die ZED-F9P-Platine verwendet gemeinsame UART/SPI-Pins und einen zweiten seriellen Port (UART2), der häufig für RTCM3-Korrekturdaten verwendet wird, um den RTK-Modus zu aktivieren.
Die Pinbelegung des J3 GH1.25-6P Pixhawk-Anschlusses listet 5V_IN, UART1 RX/TX (3.3V-Niveau) und Masse, und die Platine verwendet vier Status-LEDs für Strom, PPS-Sperre und RTK/RTCM-Aktivität.
Die ZED-F9P RTK GNSS-Empfängerplatine bietet zwei Antennenanschlussoptionen—SMA und U.FL (IPEX)—für eine flexible Installation.
Related Collections