![3DR Radio V5 Telemetry, [4] [1] [2] [3] Radio Talemet](https://rcdrone.top/cdn/shop/files/Se888e7b6abd54def8a6cc8819de18cf6Q.webp?v=1714815991)
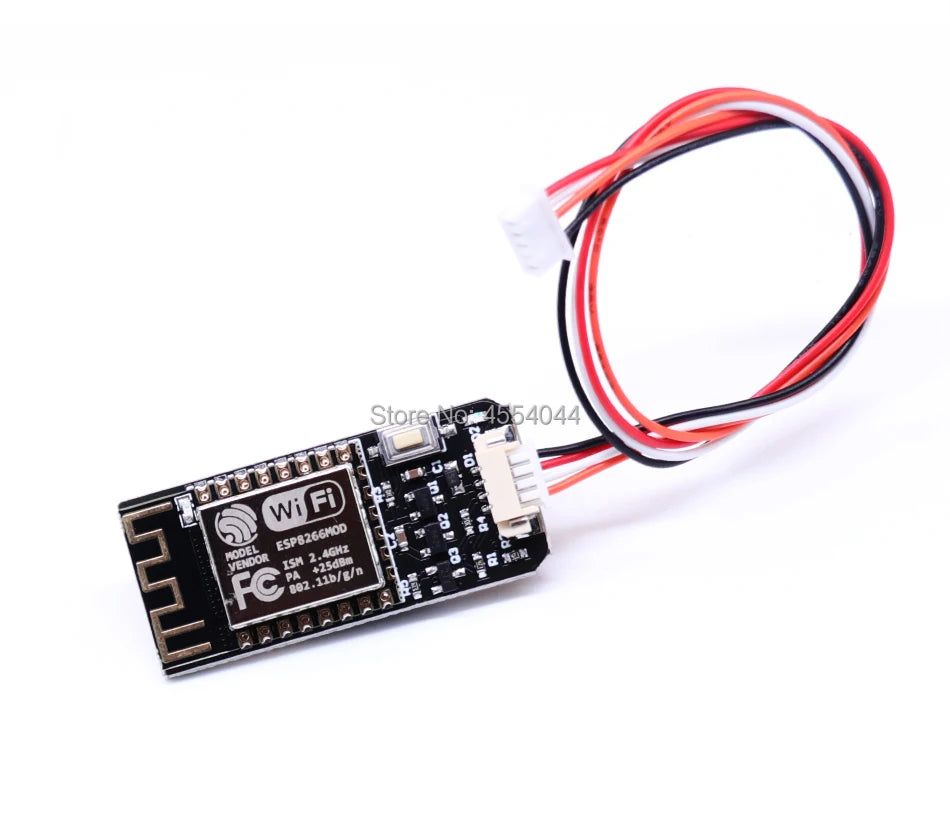










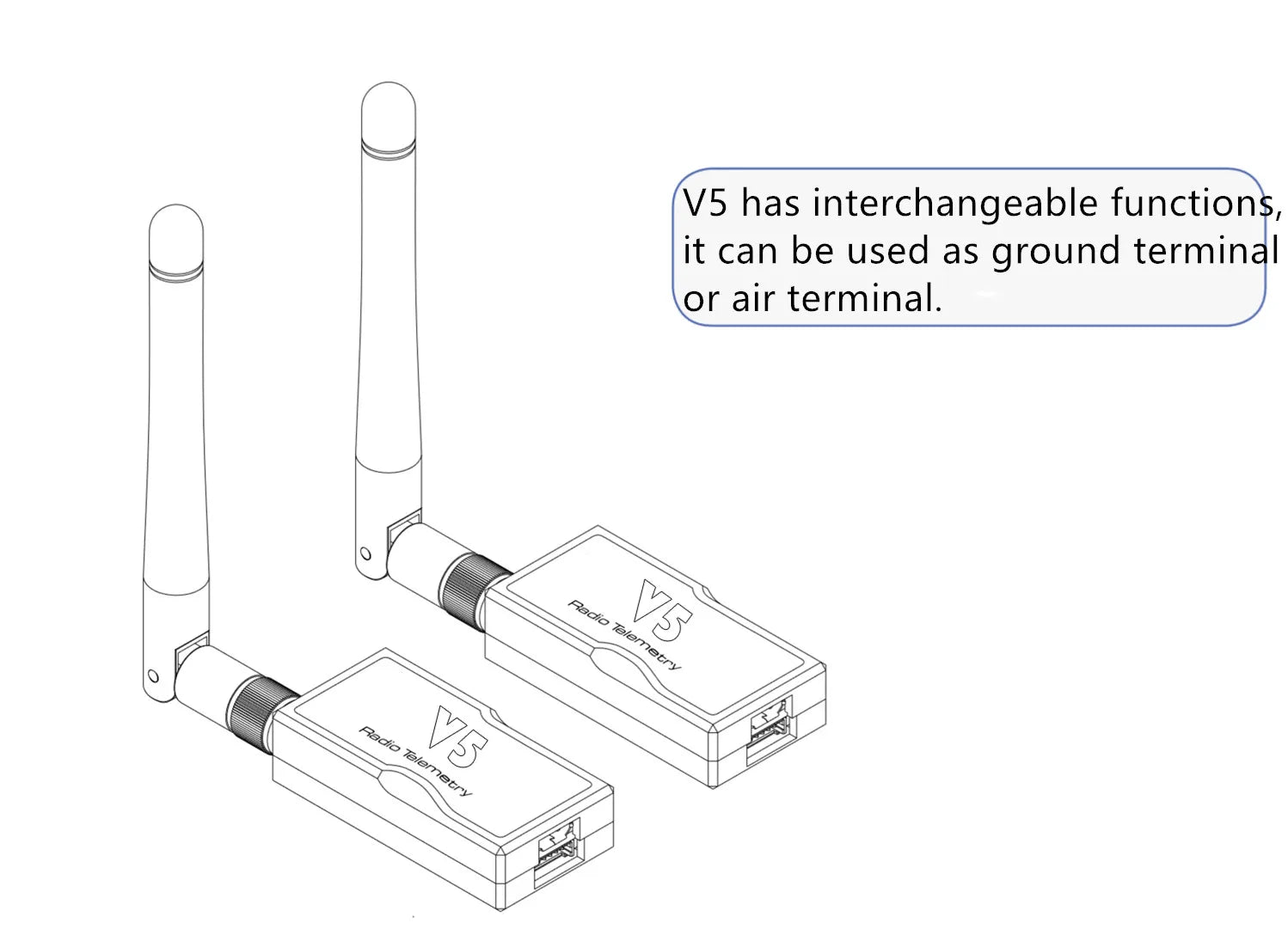
1.Verwenden Sie die 6P-Leitung zum Anschluss an den Pixhawk-Flugcontroller.
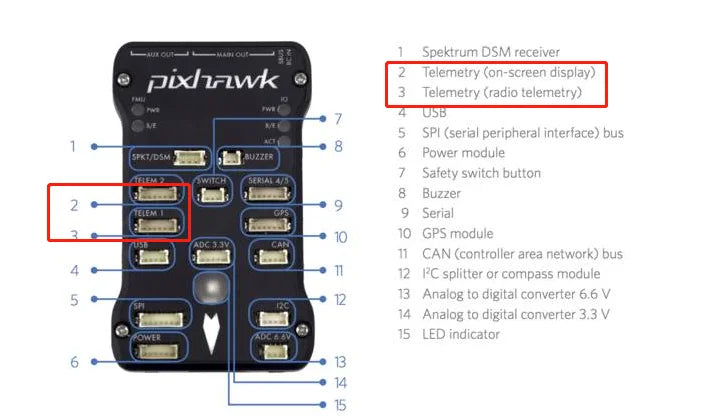
Aufgrund der unterschiedlichen Firmware können bei manchen Firmwares zwei Ports genutzt werden, bei manchen Firmwares kann nur einer der Ports genutzt werden. Suchen Sie also einen der verfügbaren Ports für die Verbindung.
Wenn Sie PX4-Firmware verwenden, kann nur TELEM1 verwendet werden, TELEM2 kann nicht verwendet werden.
WENN Sie die Arduino-Firmware verwenden, suchen Sie einen der verfügbaren Ports für die Verbindung.
2.Bitte beachten Sie:
-
Bei Verwendung einer Funktelemetrieverbindung muss ein 3DR-Stromversorgungsmodul oder ein 5-V-Regler verwendet werden, um die Flugsteuerung mit Strom zu versorgen. USB kann nicht angeschlossen werden, da die USB-Priorität höher ist als die Radiotelemetrie. Wenn das USB-Kabel eingesteckt ist, kann es nicht für die Funktelemetrieübertragung verwendet werden.
-
Die Standard-Baudrate der Radiotelemetrie ist 57600, nicht 115200. Wählen Sie den richtigen COM-Port und wählen Sie nicht AUTO. -
Wenn ein Treiberproblem vorliegt, laden Sie ihn hier herunter:pix.rctoysky.com/CP210x_VCP_Windows.rar