

















SteadyWin GIM3505-8 Integrierter Planetengetriebemotor — Quadruped-Roboter-Gelenkmodul, 8:1 Übersetzung, 24V, CAN, IP54
SteadyWin GIM3505-8 Integrierter Planetengetriebemotor — Quadruped-Roboter-Gelenkmodul, 8:1 Übersetzung, 24V, CAN, IP54
SteadyWin
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der SteadyWin GIM3505-8 integrierte planetarische Reduktionsmotor für das Gelenkmodul von Vierbeiner-Robotern ist für kompakte Robotergelenke und Aktuatorbaugruppen konzipiert. Der GIM3505-8 integriert einen 8:1 planetarischen Reduzierer mit einem bürstenlosen Motor und Onboard-Treiberoptionen, um kontrollierte Bewegungen für Vierbeiner-Roboter, Roboterarme, humanoide Gelenke und ähnliche mechatronische Systeme zu ermöglichen.
Hauptmerkmale
- Fortschrittliches planetarisches Getriebesystem für geringe Rückschläge und sanfte Bewegungen (Getrieberückschlag: 15 Bogenminuten).
- Breite Spannungsanpassungsfähigkeit: Nennspannung 24 V mit einem Betriebsbereich von 12~48 V.
- Hohe Drehmomentdichte und Effizienz: Drehmomentkonstante 0,52 N·m/A mit Nennmoment 0,65 N·m und Spitzendrehmoment 1,27 N·m.
- Kompakte Abmessungen: Ø43 × 23,6 mm (ohne Treiber); Ø43 × 30 mm (mit Treiber).
- Integrierte Sicherheitsvorkehrungen: Übertemperatur-, Überspannungs- und Überlastschutz (dreischichtiger Schutz in den Produktunterlagen angegeben).
- CAN-Kommunikationsschnittstelle; unterstützt separaten Encoder und optionalen benutzerdefinierten Bremsen.
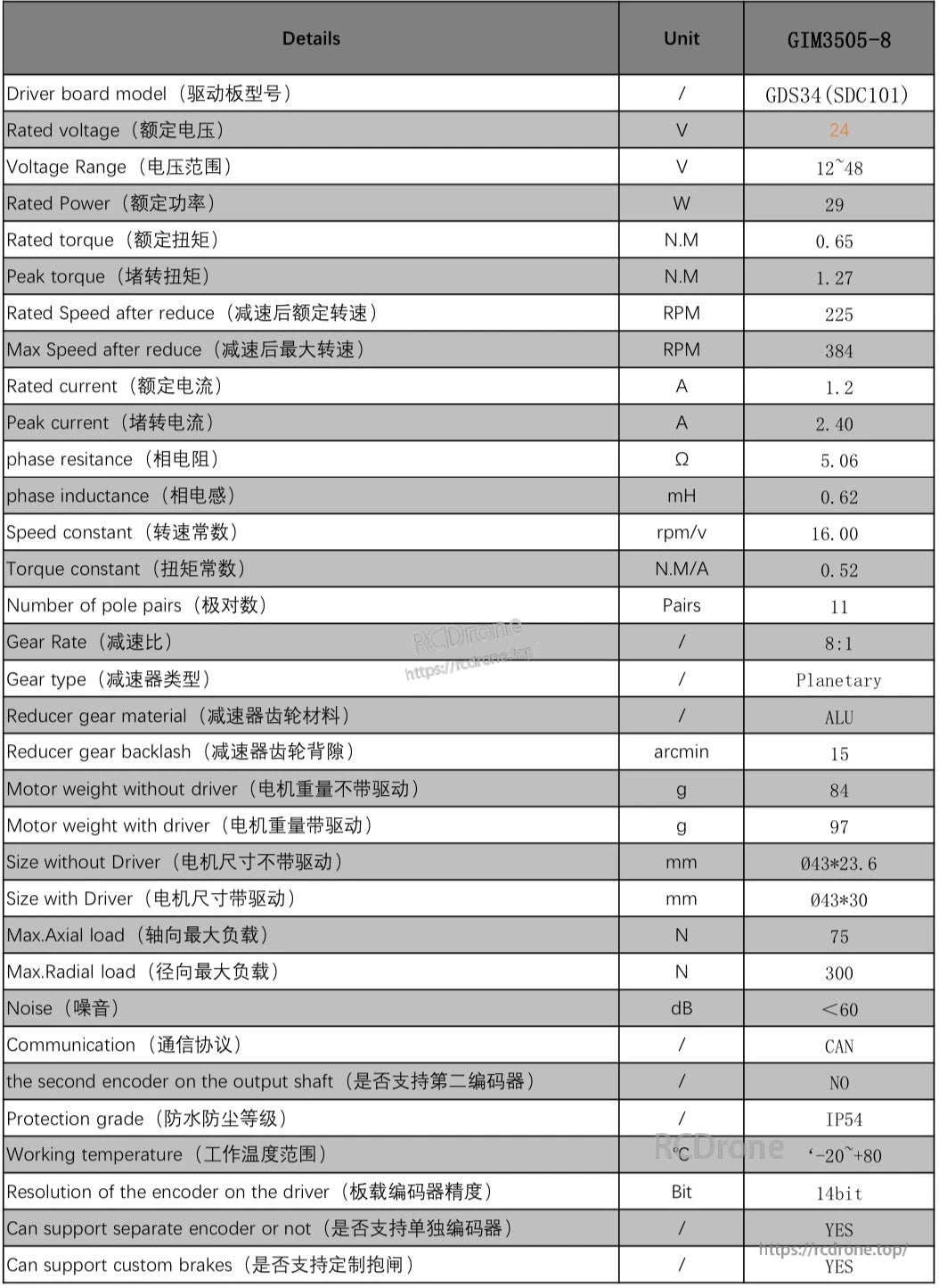
Technische Daten
Parameter Wert ---------------------------------------- -------------------------- Modell GIM3505-8 Treiberplatinenmodell GDS34 (SDC101) Nennspannung 24 V Spannungsbereich 12~48 V Nennleistung 29 W Nennmoment 0.65 N·m Spitzen-(Stillstands-)moment 1.27 N·m Nennumdrehungen nach Reduktion 225 U/min Maximale Umdrehungen nach Reduktion 384 U/min Nennstrom 1.2 A Spitzen-(Stillstands-)strom 2.4 A Phasenwiderstand 5.06 Ω Phaseninduktivität 0.62 mH Drehzahlkonstante 16 U/min/V Drehmomentkonstante 0,52 N·m/A Anzahl der Polpaare 11 Paare Übersetzungsverhältnis 8:1 Getriebeart Planetengetriebe Material des Reduziergetriebes ALU Rücklauf des Reduziergetriebes 15 Bogenminuten Motorgewicht (ohne Treiber) 84 g Motorgewicht (mit Treiber) 97 g Größe (ohne Treiber) Ø43*23.6 mm Größe (mit Treiber) Ø43*30 mm Max. axiale Last 75 N Max. radiale Last 300 N Geräusch <60 dB Kommunikation CAN Zweiter Encoder an der Ausgangswelle NEIN Schutzart IP54 Betriebstemperatur -20°C bis +80°C Encoderauflösung am Treiber 14 Bit Getrennter Encoder-Support JA Benutzerdefinierte Bremsenunterstützung JA
Anwendungen
- Quadruped-Roboter (Bein-Gelenke und Aktuatoren)
- Humanoide Roboter-Gelenke
- Roboterarme und Manipulatoren
- Exoskelett-Aktuatoren
- AGV/AMR Lenk- und Gelenkmodule
- Autonome Forschungs- und Universitätsrobotikprojekte
Für Kundenservice und technische Anfragen kontaktieren Sie [email protected].
Handbücher
Details


SteadyWin GIM3505-8 Gelenkspezifikationen: 24V, 29W, 0.65N.M Drehmoment, Planetengetriebe, CAN-Kommunikation, IP54 bewertet, unterstützt benutzerdefinierte Bremsen und separate Encoder, arbeitet von -20°C bis +80°C.
Related Collections

















