




CEREBOTO OpenArm 7DOF Roboterarm-Bausatz – DIY oder vormontiert, Open-Source ROS/Python-Steuerung
CEREBOTO OpenArm 7DOF Roboterarm-Bausatz – DIY oder vormontiert, Open-Source ROS/Python-Steuerung
CEREBOTO
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der CEREBOTO OpenArm 7DOF Roboterarm ist ein Forschungsgerät, das für Universitäten, Labore, Startups und ernsthafte Maker entwickelt wurde. Mit 7 Freiheitsgraden, einer Armreichweite von 633 mm, einer typischen Nutzlast von 4,1 kg und einer Spitzenlast von 6,0 kg pro Arm bietet OpenArm hochpräzise Bewegungen, sichere physische Interaktion und umfangreiche Open-Source-Tools.
Sie können ein DIY-Hardware-Kit für die vollständige Montage oder einen werkseitig kalibrierten, einsatzbereiten Fertigarme wählen. Einzelarm-, Doppelarm- und Quadarmkonfigurationen sind verfügbar.
Hauptmerkmale
-
7DOF Roboterarm im menschlichen Maßstab – entwickelt, um einer menschlichen Armlänge von 160–165 cm für natürliche Manipulation und Teleoperation zu entsprechen.
-
Hohe Nutzlast &und Stabilität – typische Nutzlast 4,1 kg, Spitzenlast 6,0 kg pro Arm, mit einem leichten Armgewicht von 5,5 kg.
-
Rückführbare Motoren &und nachgiebige Struktur – sichere, reibungslose Interaktion für die Zusammenarbeit zwischen Mensch und Roboter sowie für kraftgesteuerte Aufgaben.
-
1 kHz CAN-FD Regelkreis – Echtzeit-, latenzkontrollierte Steuerung für Hochleistungsforschung und industrielle Anwendungen.
-
Vollmetallkonstruktion – robuste Hauptstruktur aus Aluminiumlegierung und rostfreiem Stahl für Steifigkeit und Langlebigkeit.
-
Open-Source-Hardware &und Software – offene CAD-, PCB-, Firmware- und Steuerungssoftware für tiefgehende Anpassungen.
-
ROS-, Python- und C++-Unterstützung – offizielle ROS-Integration sowie Python/C++-APIs für eine schnelle Algorithmusentwicklung.
-
Reiches Ökosystem und Erweiterung – unterstützt geschickte Roboterhände, Motion-Capture-Handschuhe und mobile Basen für vollständige Roboterplattformen.
Technische Spezifikationen
-
Freiheitsgrade: 7 DOF pro Arm
-
Armlänge: 633 mm
-
Typische Nutzlast: 4,1 kg
-
Maximale Nutzlast: 6,0 kg pro Arm
-
Armgewicht: ca. 5.5 kg pro Arm
-
Materialien: Aluminiumlegierung und rostfreie Stahlstrukturteile
-
Steuerungsschnittstelle: CAN / CAN-FD, UART (über den mitgelieferten USB2CANFD-X2-Adapter bei Dual-/Quad-Arm-Versionen)
-
Steuerfrequenz: bis zu 1 kHz CAN-FD-Schleife
-
Softwareunterstützung: ROS-Framework, Python-API, C++-API
-
Ergonomie: Armlänge geeignet für Benutzer mit einer Körpergröße von 160–165 cm
Software &und Open-Source-Ökosystem
OpenArm ist eine vollständig Open-Source-Roboterarm-Plattform.Die offiziellen Ressourcen umfassen:
-
Website: openarm.dev
-
Dokumentation: docs.openarm.dev
-
GitHub: github.com/enactic/openarm
-
Tutorial-Video: offizieller YouTube-Leitfaden für den Einstieg
Mit offenen CAD-, PCB- und Firmware-Dateien können Sie Mechanik, Elektronik und Steuerungssoftware modifizieren oder den Arm mit neuen Sensoren und Endeffektoren für Ihre eigenen Forschungsthemen erweitern.
Typische Anwendungsszenarien
OpenArm wurde als vielseitige, hochpräzise Forschungs- und Lehrplattform für:
-
Universitätsrobotik-Kurse und Laborversuche
-
Forschungsinstitute und Laborprojekte
-
Verstärkendes Lernen und physikbasierte KI-Forschung
-
Mensch-Roboter-Interaktion und Studien zu kollaborativen Robotern
-
Makerspaces und Open-Source-Hardware-Teams
-
Ingenieurausbildung und Trainingsplattformen
Mit seiner menschlichen Größe und der nachgiebigen Aktuation ist OpenArm ideal für Manipulation, Teleoperation, Imitationslernen, assistive Robotik und mehr.
Produktversionen &und Konfigurationen
Version 1 – DIY-Hardware-Kit
-
Für Benutzer mit ausgeprägten praktischen Fähigkeiten, die die mechanische Struktur tiefgehend verstehen möchten.
-
Enthält alle mechanischen, elektrischen und 3D-gedruckten Teile; Sie montieren und kalibrieren den Arm selbst gemäß dem Handbuch.
Version 2 – Fertig montierter Roboterarm
-
Für Forschungsinstitute, Labore, Unternehmen und Bildungseinrichtungen, die eine Plug-and-Play-Plattform benötigen.
-
Vollständig montiert, abgestimmt und kalibriert vor dem Versand; sofort einsatzbereit.
Verfügbare Armkonfigurationen (je nach Angebot):
-
DIY-Kit – Einzelarm
-
Fertiger Arm – Einzelarm
-
DIY-Kit – Doppelarme
-
Fertige Arme – Doppelarme
-
DIY-Kit – Quad-Arme
-
Fertige Arme – Quad-Arme
Inhalt des Pakets
Jedes OpenArm-Kit oder fertiges System umfasst typischerweise:
-
Aluminiumlegierungs- und Edelstahl-Hauptstrukturkomponenten
-
Motoren, Treiberplatinen, Stromversorgung und Kabel
-
3D-gedruckte Teile und Schraubensätze
Duale und quad-arme Versionen: ein offizielles BOM-kompatibles USB2CANFD-X2 Gerät (CEREBOTO ist der autorisierte inländische Vertreter) für die PC-zu-CAN-FD-Kommunikation.
Unterstützte Hardware-Erweiterungen
OpenArm unterstützt mehrere Hardware-Erweiterungen (separat erhältlich), mit denen Sie ein komplettes Robotersystem aufbauen können:
-
Geschickte Roboterhand – für feine Manipulation und Greifforschung.
-
Bewegungserfassungs-Handschuhset – für intuitive Teleoperation und Imitationslernen.
-
Mobile Basis – um OpenArm in eine mobile Manipulator-Plattform zu verwandeln.
FAQ
F: Kann der Roboterarm sofort verwendet werden?
A: Die fertige Armversion ist werkseitig vollständig abgestimmt und kalibriert – einfach einschalten und mit der Arbeit beginnen. Das DIY-Hardware-Kit erfordert, dass Sie das System gemäß den Anweisungen zusammenbauen und einrichten.
Q: Ist OpenArm mit ROS oder anderer Middleware kompatibel?
A: Ja. OpenArm unterstützt offiziell das ROS-Framework, und Sie können den Arm auch über Python- und C++-APIs steuern.
Q: Für wen ist dieses Produkt gedacht?
A: Forscher an Universitäten und Instituten, KI &und Robotiklabore, Lehrveranstaltungen, Ingenieurausbildungszentren und fortgeschrittene Hobbyisten.
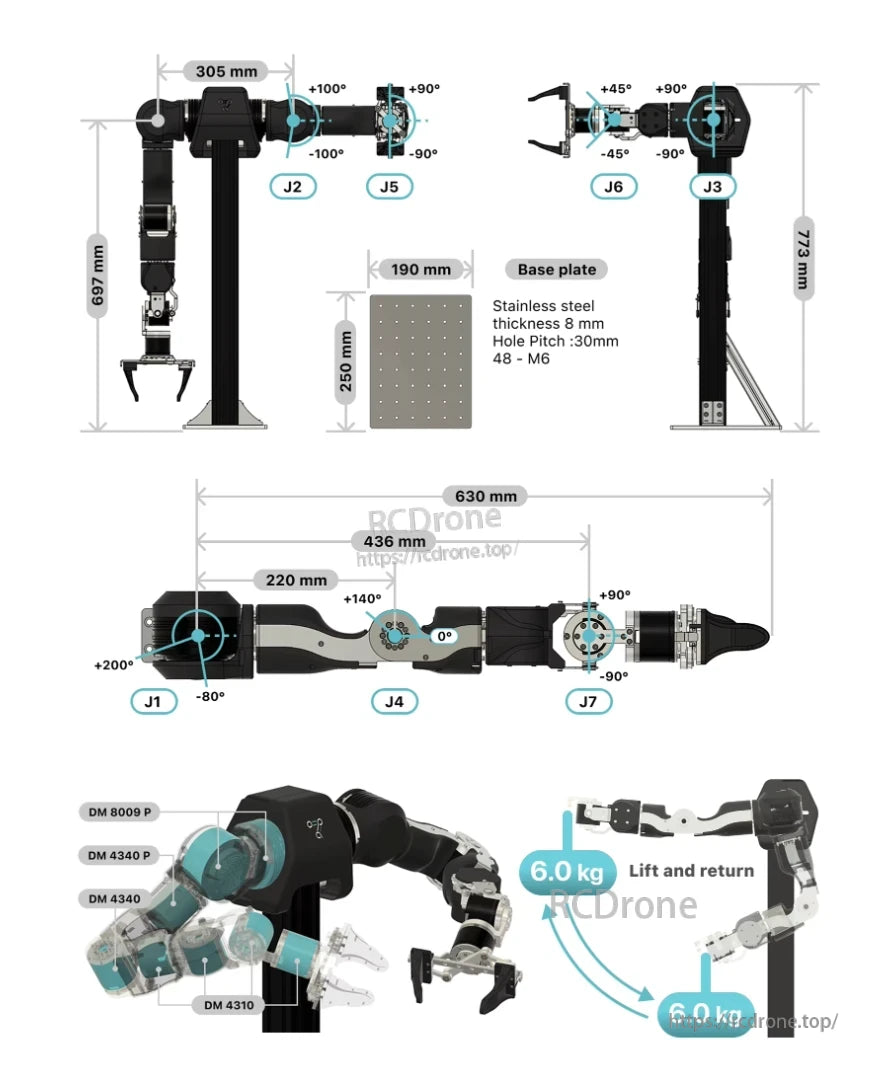
Der Cereboto OpenArm 7DOF Roboterarm hat sieben Gelenke (J1–J7) mit definierten Winkelbereichen. Er ist 697 mm oder 773 mm hoch, erreicht 630 mm und wird auf einer 190×250 mm großen Edelstahl-Basisplatte montiert—8 mm dick mit 48 M6-Löchern, die im Abstand von 30 mm angeordnet sind. Angetrieben von DM8009P, DM4340P, DM4340 und DM4310 Motoren, bewältigt er 6,0 kg Nutzlasten mit Präzision. Entwickelt für industrielle und Forschungsanwendungen, vereint er strukturelle Robustheit mit präziser Bewegungssteuerung.

Related Collections



