






CUAV Pixhawk V6X V2 Drohnen-Controller für PX4 ArduPilot, STM32H753IIK6, RM3100, 100Mbps Ethernet
CUAV Pixhawk V6X V2 Drohnen-Controller für PX4 ArduPilot, STM32H753IIK6, RM3100, 100Mbps Ethernet
CUAV
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
CUAV Pixhawk V6X V2 ist ein Pixhawk-Serie Drohnencontroller , der für die PX4- und ArduPilot-Autopilot-Firmware entwickelt wurde. Er folgt dem Pixhawk FMU v6x Standard und der modularen Designphilosophie und bietet verbesserte industrielle redundante Sensorik, eine konstanttemperierte externe Uhr und ein Wärmeableitungsdesign für den MCU, 5V/3.3V PWM-Pegelumschaltung und eine patentierte Stoßdämpfungsstruktur. Das Standard-PMU 2 Lite Stromversorgungsmodul unterstützt 70V Eingangs- und 220A Stromerkennung.
Hauptmerkmale
- H7-Doppeltpräzisions-Gleitkommaeinheit (STM32H753IIK6); 480MHz Doppeltpräzisions-Gleitkommaeinheit; 2M Flash-Speicher
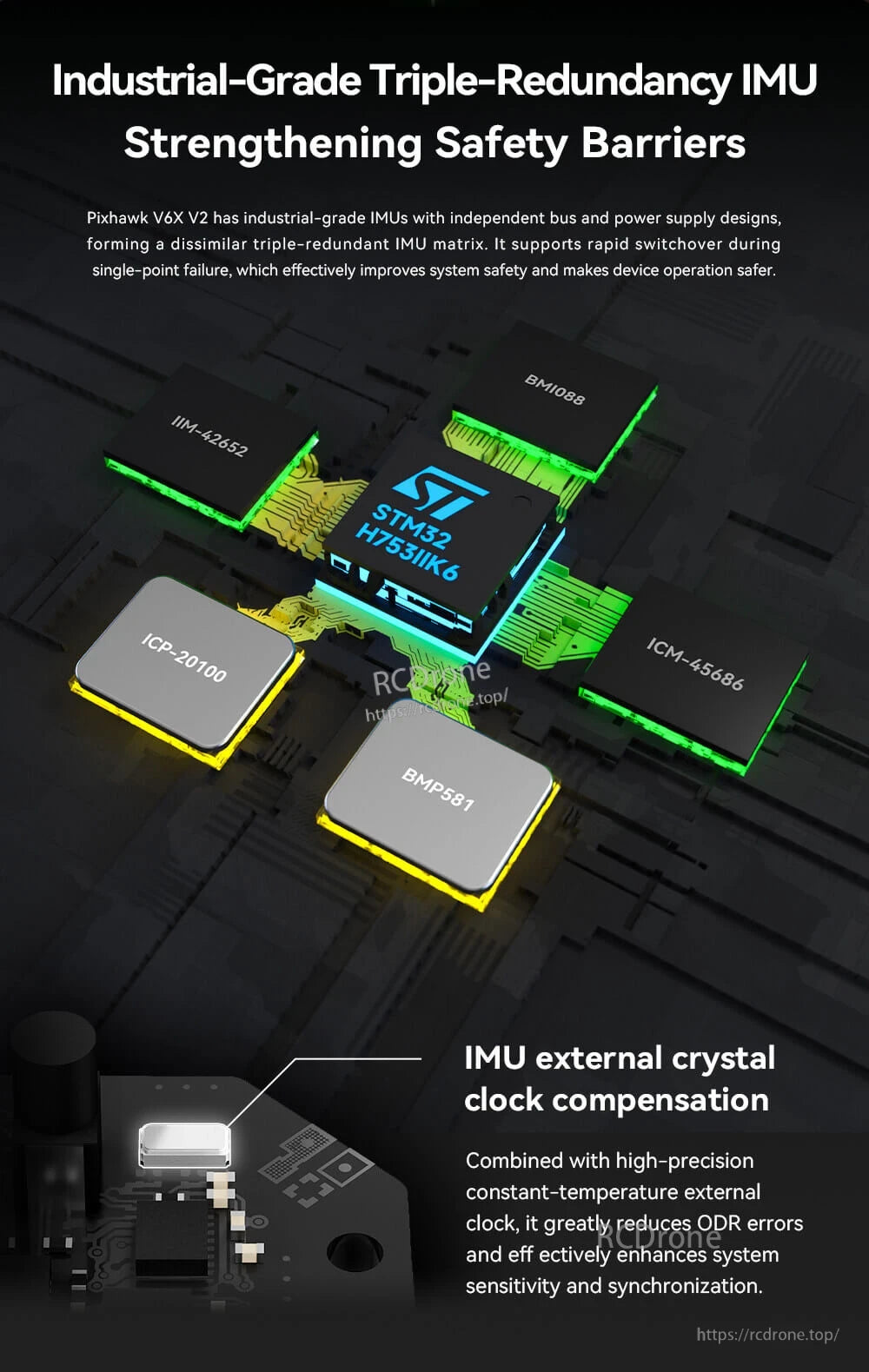
- Industriegrad unähnliche dreifach redundante IMU-Matrix mit unabhängigem Bus- und Stromversorgungsdesign (IIM-42652, BMI088, ICM-45686)
- Kombinierter dual-redundanter Barometer (BMP581, ICP-20100)
- Kern-Schockabsorptionssystem mit dreiachsiger (X, Y, Z) Schockabsorption; geneigtes Vier-Ecken-Stützdesign; neue Art von schockabsorbierendem Material
- Automobilgrad RM3100 Magnetkompass für robuste Ablehnung magnetischer Störungen
- IMU externe Kristall-Uhrkompensation (verwendet mit hochpräziser konstanttemperatur externer Uhr zur Reduzierung von ODR-Fehlern und Verbesserung der Empfindlichkeit und Synchronisation)
- Konstanttemperaturregelungssystem: wärmeleitendes Silikon und IMU-Temperaturkompensation zur Reduzierung temperaturbedingter Abdrift
- Flexibles Software, das zwischen 5V und 3V wechselt.3V PWM-Ausgangspegel
- Integrierte 100 Mbps Ethernet-Schnittstelle für die Hochgeschwindigkeitsdaten-Synchronisation mit Geräten wie Missionscomputern und Vermessungskameras
- Unterstützt sicheren Boot und sichere Firmware-Update-Dienste
- Multi-redundantes Stromversorgungsdesign; unterstützt 2-Kanal CAN PMU-Eingang; PMU 2 Lite ist standardmäßig enthalten
- Unterbodenmontagelöcher hinzugefügt für direkte Schraubmontage; Montagelöcher kompatibel mit M2-Standard-Schrauben
Technische Daten
| Prozessor | STM32H753IIK6 |
| Co-Prozessor | STM32F103 |
| Version | Pixhawk V6XV2 |
| CPU / Speicher (angegeben) | 480MHz Gleitkommaeinheit mit doppelter Genauigkeit; 2M Flash-Speicher |
| Beschleunigungsmesser & Gyroskop | IIM-42652; BMI088; ICM-45686 |
| Kompass | RM3100 |
| Barometer | BMP581; ICP-20100 |
| PWM I/O | 16 |
| PWM-Niveau | 3.3V / 5V (Softwareumschaltung) |
| Strom | 2 (2 CAN-Stromschnittstellen) |
| GPS-Port | 2 (GPS1: GPS-Schnittstelle mit I2C und Sicherheitsschalter; GPS2: Schnittstelle mit I2C und GPS) |
| TELEM-Port | 3 |
| CAN-Bus | 2 |
| PPM RC | 1 (dedizierter Eingang für PPM-Empfänger) |
| SBUS/DSM/RSSI | 2 (1 SBUS/DSM/Spektrum-Eingang; 1 analog 3.3V/PWM-Eingang) |
| SBUS-Ausgänge | 1 |
| FMU-Debug | 1 |
| IO-Debug | 1 |
| Ethernet | 1 (100 Mbps) |
| SPI extern 1 | 1 (SP16-Schnittstelle für externe Sensorerweiterung) |
| ADIO | 1 (AD3.3/ADC6.6) |
| UART4 | 1 |
| USB-Port | 2 (Typ-C x1; GH-Schnittstelle x1 für USB externe Verbindung) |
| TF-Karte | 1 |
| Strommodul | Standard PMU 2 Lite (5V-Version), Eingangsspannung: 12-70V |
| Betriebsspannung | USB: 4.75-5.25V; PMU 2 Lite: 12-70V; Leistung: 4.85-5.45V |
| Betriebstemperatur | -20 bis 85C |
| Größe | 45 x 85.1 x 29.2 mm |
| Gewicht | Controller: 97.9g; Kern: 43.1g; Trägerplatine (einschließlich Schrauben): 54.8g |
| Montagehinweis (Diagrammtext) | Montagelöcher kompatibel mit M2 Standard-Schrauben; Abmessungen: 72 mm; 22.50 mm; 24 mm |
Was ist enthalten
- Pixhawk V6X V2 x1
- CAN PMU 2 Lite 5V Strommodul x1
- PMU 2 Lite-5V Header-Stromkabel (X7+ (V6X) Version), Kabellänge: 25cm x1
- CAN/I2C Erweiterungsplatine x1
- TF Speicherkarte x1
- Type-C Kabel, Kabellänge: 100cm x1
- DSM RC Kabel, Kabellänge: 30cm x1
- SBUS RC Kabel, Kabellänge: 30cm x1
- PPM RC/SBUS OUT Kabel, Kabellänge: 30cm x1
- Ethernet Kabel, Kabellänge: 40cm x1
- CAN Kabel, Kabellänge: 30cm x1
- TELEM Kabel, Kabellänge: 30cm x1
- UART 4 Kabel, Kabellänge: 30cm x1
- UART4 -> I2C Kabel, Kabellänge: 30cm x1
- ADIO Kabel, Kabellänge: 30cm x1
- Debug Kabel, Kabellänge: 10cm x1
- USB -> Type-C Weiblicher Anschluss Verlängerungskabel, Kabellänge: 50cm x1
- 3M Doppelseitig x2
Anwendungen
- Kompatibel mit ArduPilot und PX4
- Unterstützt Multirotor, Starrflügler, VTOL Starrflügler, unbemannte Hubschrauber, unbemannte Fahrzeuge und unbemannte Schiffe (U-Boote)
- Hochgeschwindigkeits-Ethernet-Daten-Synchronisation mit Missionscomputern und anderen an Bord befindlichen Geräten, wo unterstützt
Für Kompatibilitätsprüfungen und Einrichtungsfragen kontaktieren Sie [email protected] oder besuchen Sie https://rcdrone.top/.
Video
Details

Der Pixhawk V6X V2 Flugcontroller verwendet einen H7-Prozessor und bietet eine dreifach redundante IMU, ein duales Barometer und einen RM3100-Kompass mit einem schockabsorbierenden Design.

Der Pixhawk V6X V2 verwendet einen STM32H753IIK6 H7-Prozessor, um PX4- und ArduPilot-basierte Flugsteuerungssysteme zu unterstützen.

Der Pixhawk V6X V2 verwendet eine dreiachsige (X, Y, Z) schockabsorbierende Halterung mit vier geneigten Eckstützen, um Vibrationen und Geräusche zu reduzieren.
Das Design des Pixhawk V6X V2 Flugcontrollers verfügt über eine dreifach redundante IMU-Anordnung rund um den STM32H753IIK6 sowie eine externe Quarz-Uhrkompensation für die Sensorzeitmessung.

Der Pixhawk V6X V2 integriert einen Automobil-Qualitäts-RM3100-Magnetometer und unterstützt die GPS-Richtungsbestimmung für eine stabilere Orientierung und Navigation.
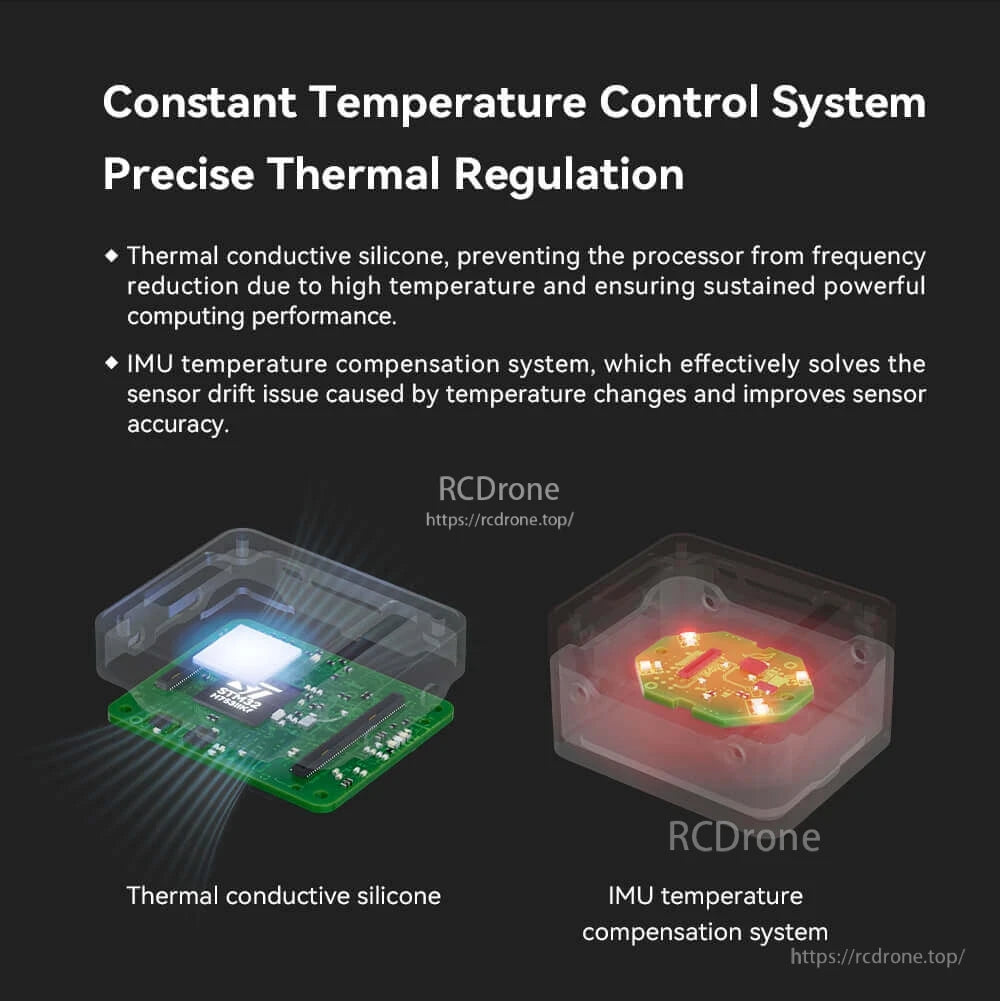
Ein konstantes Temperaturkontrollsystem verwendet thermisch leitfähiges Silikon und IMU-Temperaturkompensation, um temperaturbedingte Abweichungen zu reduzieren.
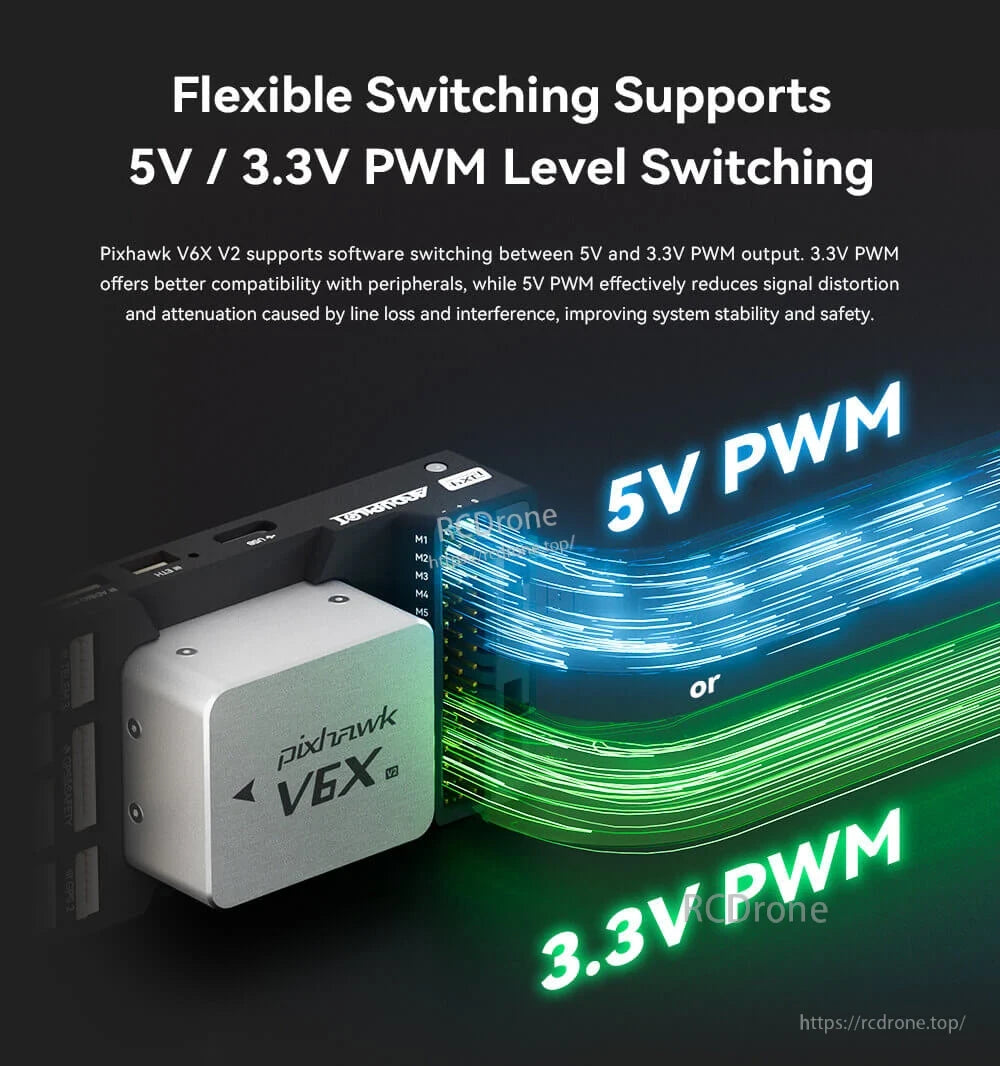
Pixhawk V6X V2 unterstützt flexibles Umschalten zwischen 5V und 3,3V PWM-Ausgangsniveaus für eine einfachere Kompatibilität mit verschiedenen Peripheriegeräten.

Pixhawk V6X V2 integriert eine 100 Mbps Ethernet-Schnittstelle sowie beschriftete Anschlüsse wie USB, TELEM3, CAN und GPS & Sicherheit für saubere Verkabelung.
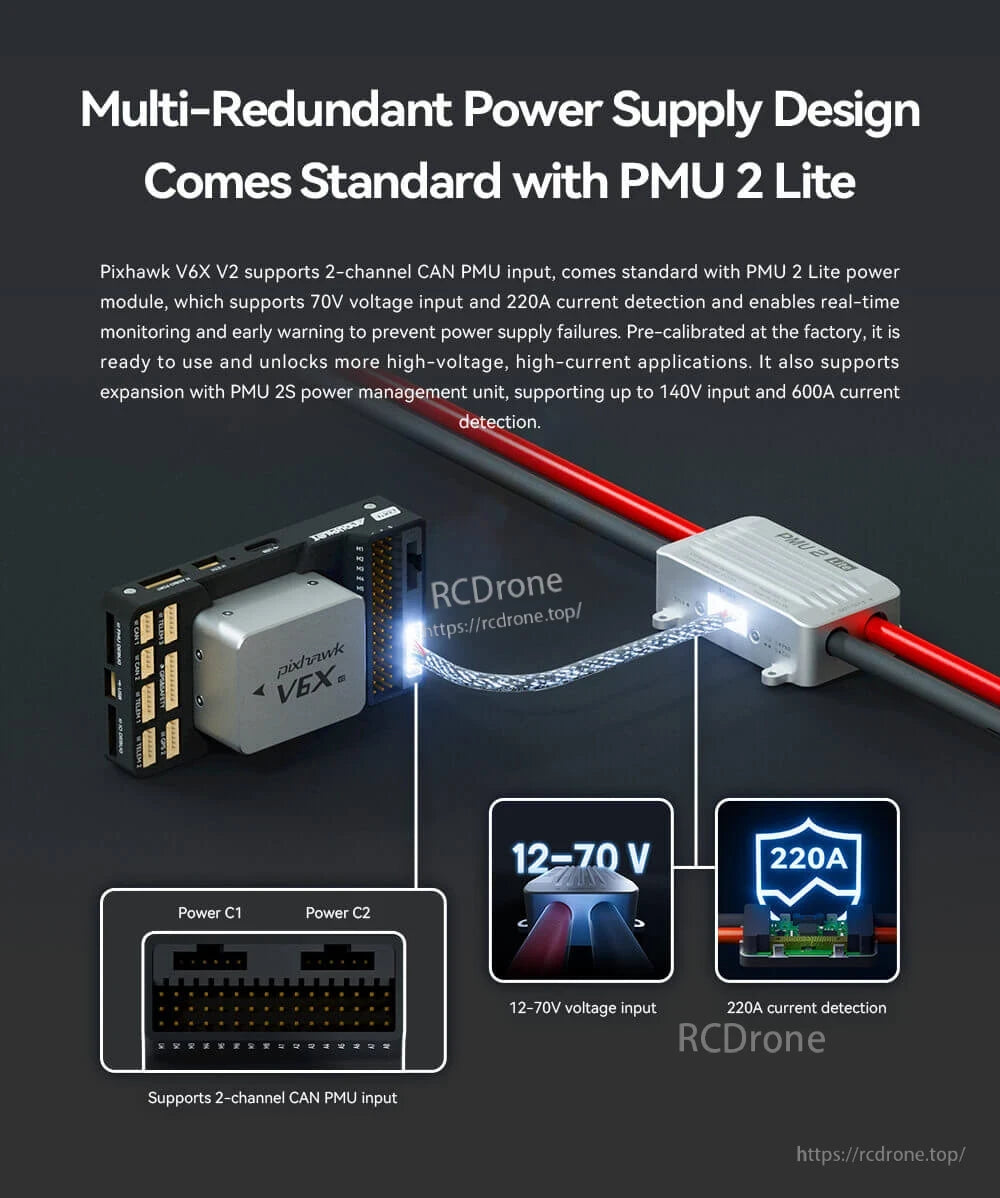
Pixhawk V6X V2 wird mit dem PMU 2 Lite-Modul für mehrfache redundante Stromversorgung kombiniert, unterstützt 12–70V und 220A Stromerkennung.

Der CUAV Pixhawk V6X V2 verwendet ein modulares, abnehmbares Kernmodul auf einer Trägerplatine, um die Anpassung und den Zugang zu Anschlüssen zu vereinfachen.
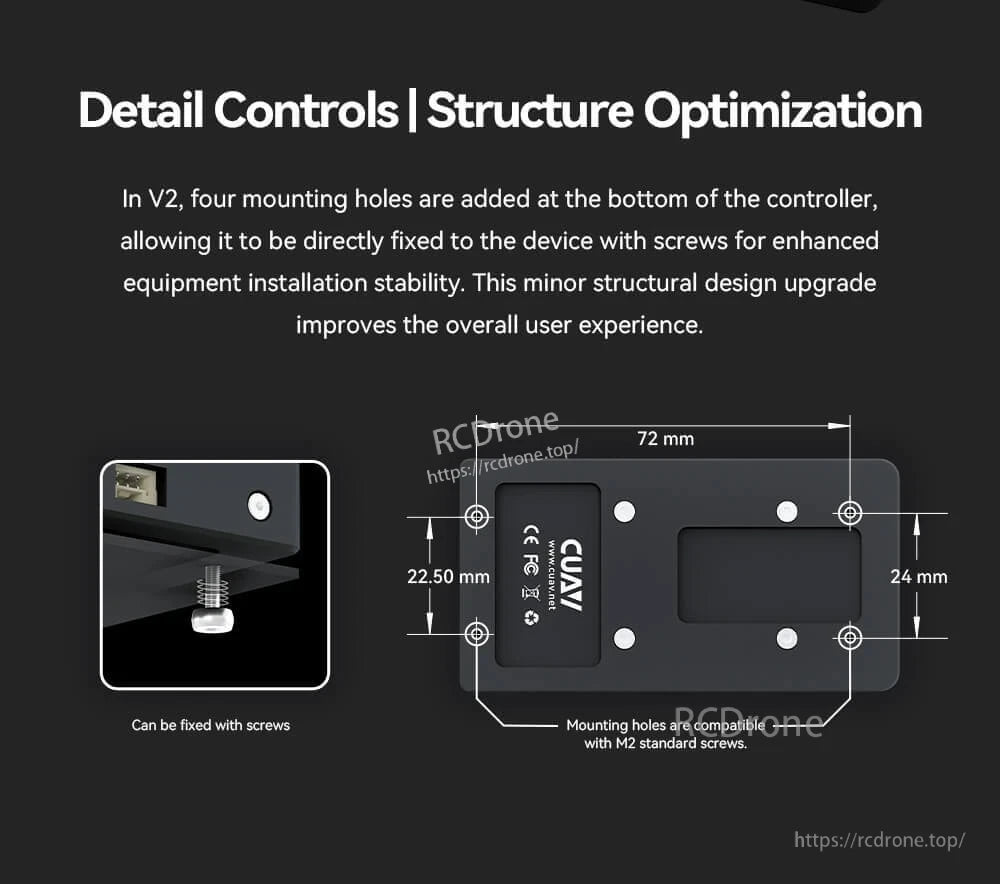
Der CUAV Pixhawk V6X V2 fügt vier M2-kompatible Montageschraubenlöcher mit einem Fußabdruck von 72 mm für eine sicherere Schraubmontage hinzu.

Der Pixhawk V6X V2 unterstützt die ArduPilot- und PX4-Firmware für eine Vielzahl von unbemannten Plattformen, einschließlich Multikoptern, Starrflügelflugzeugen sowie Boden- oder Marinefahrzeugen.
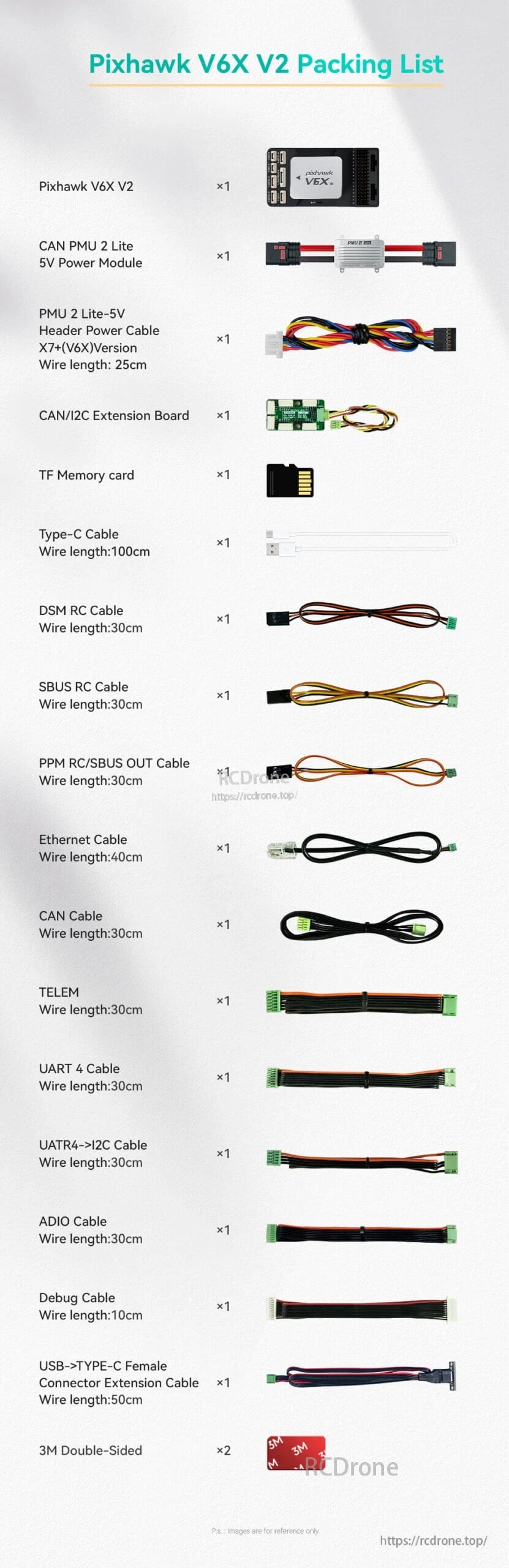
Das Pixhawk V6X V2 Kit umfasst den Flugcontroller, das CAN PMU 2 Lite 5V Strommodul, die TF-Speicherkarte und ein Set von Type-C-, RC-, Ethernet-, CAN-, TELEM-, UART-, ADIO- und Debug-Kabeln.
Related Collections


















