








CUAV X25 EVO Autopilot-Flugcontroller – STM32H7, Dreifach-IMU, Dual-Baro, RM3100, CAN, 16 PWM, PX4/ArduPilot
CUAV X25 EVO Autopilot-Flugcontroller – STM32H7, Dreifach-IMU, Dual-Baro, RM3100, CAN, 16 PWM, PX4/ArduPilot
CUAV
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
CUAV X25 EVO ist ein hochzuverlässiger Kerncontroller für unbemannte Systeme. Er kombiniert einen STM32H7 (480 MHz, 2 MB Flash) Prozessor mit einem dreifachen industriellen IMU-Array, dualen Barometern und RM3100 Magnetometern. Eine neu gestaltete Stromarchitektur unterstützt 10–18 V Eingang und bietet bis zu 5 V/12 A externen Ausgang, um schwere Nutzlasten zu versorgen. Der Controller integriert eine duale Strompfad-Redundanz, umfassenden ESD-/Überstromschutz, RGB-Statusanzeige und ein modulares CORE/Trägersystem. Er ist kompatibel mit ArduPilot und PX4 und eignet sich für Multirotoren, Festflügler, VTOL, Hubschrauber, UGV/USV/UUV und andere Plattformen.
Hauptmerkmale
-
Hochleistungsrechner: STM32H7 @ 480 MHz, 2 MB Flash; niedriger CPU-Nutzungsraum für fortschrittliche Algorithmen (nicht-GPS-Navigation, FFT-Filter, LUA-Skripte).
-
Industrielle Sensorsuite:
-
IMUs: 2× TDK IIM-42653 (±4000 °/s, ±32 g) + 1× TDK IIM-42652 (±2000 °/s, ±16 g).
-
Magnetometer: PNI RM3100 (störungsresistent).
-
Barometer: TDK ICP20100 &und Bosch BMP581 (dual).
-
Heterogene IMU-Matrix mit fehlertolerantem Umschalten.
-
-
Duales Temperaturkompensationssystem für die IMU: Echtzeitkompensation ±0,5 °C; im Vergleich zur vorherigen Generation—15% geringerer Temperaturdrift, 25% bessere Konsistenz der Lagebestimmung.
-
Vibrationsisolierung: 4. Generation geneigte symmetrische Nylonmatrix-Dämpfung; optionale externe Fest-Ohr Isolatoren zur Unterdrückung abnormaler hochfrequenter Vibrationen und zur Verbesserung der Datenintegrität.
-
Stromarchitektur: Onboard 5 V/15 A Hochleistungs-DC-DC; externer Anschluss unterstützt 5 V/12 A Ausgang; Eingangsbereich 10–18 V.
-
Netzwerk &und Busse: CAN-Bus (intelligente Batterie/ESC/Servos, Telemetrie-Feedback) + 100 M Ethernet.
-
Reichlich I/O: bis zu 16 PWM über Servoanschlüsse; bis zu 32 PWM über CAN-Erweiterung.
-
Robustheit &und QA: Dual-Channel-Stromredundanz, ESD &und Überstromschutz, antistatisches Steckdesign, PCB-Beschichtung und vollautomatisierte Tests.
-
RGB-Statusanzeige: Mehrfarbige LEDs für das Arming, die Stromversorgung, GNSS/Position, Fehlermodi usw.
html
Technische Daten
| Kategorie | Detail |
|---|---|
| Prozessor | STM32H7 Arm® Cortex®-M7 @ 480 MHz, 2 MB Flash |
| Version | X25 EVO |
| IMUs | IIM-42653 ×2 (Gyroskop ±4000 °/s; Beschleunigung ±32 g); IIM-42652 ×1 (Gyroskop ±2000 °/s; Beschleunigung ±16 g) |
| Magnetometer | RM3100 |
| Barometer | TDK ICP20100 / Bosch BMP581 (dual) |
| PWM-Ausgänge | 16 (Servo-Bank M1–M16) |
| Stromanschlüsse (CAN) | 2 |
| GPS-Ports | 2 |
| TELEM-Ports | 2 |
| UART4 | 1 |
| RC-Eingang | 1 (PPM / SBUS / DSM usw.html ) |
| DEBUG (DSU) | 1 |
| Ethernet | 1 (100 M) |
| CAN | CAN1 ×3, CAN2 ×2 (insgesamt 5) |
| SPI6 Erweiterung | 1 |
| ADC | 1× 3V3, 1× 6V6 |
| USB | 1× Typ-C |
| I²C | 3 |
| RSSI | 1 |
| Strommodul | PMU 2 Lite |
Betriebsbedingungen &und Physikalische
| Artikel | Wert |
|---|---|
| Eingangsspannung (Controller) | 10–18 V |
| USB | 4.75–5.25 V |
| PMU 2 Lite Versorgungsbereich | 20–70 V |
| Externe 5 V Schiene | bis zu 12 A Ausgang (für Peripheriegeräte/schwere Lasten) |
| Betriebstemperatur | −20 °C bis +85 °C |
| Abmessungen | 76,5 × 45,45 × 32,2 mm |
| Gewicht | 110 g |
Schnittstellen &und Layout-Highlights
-
Duale POWER C1/C2 Schienen, RC IN, M1–M16 Servobank.
-
Seitenanschlüsse für UART/TELEM, ADC, USB-C (Debug/IO), I²C, CAN1/CAN2, ETH.
-
Entwickelter CORE, der für die Entwicklung von benutzerdefinierten Trägerplatinen abnehmbar ist.
Kompatibilität &und Anwendungen
-
Firmware: voll kompatibel mit ArduPilot und PX4 (Treiber &und Funktionen).
-
Fahrzeuge: Multirotor, Starrflügler, VTOL, Hubschrauber, UGV, USV, UUV/Unterwasserfahrzeug und andere unbemannte Plattformen.
Im Lieferumfang (X25 EVO Kit)
-
X25 EVO Flugcontroller × 1
-
CAN PMU2 Lite (15 V) Strommodul × 1
-
CAN Erweiterungsplatine × 1
-
CAN Datenkabel (35 cm) × 2
-
USB Typ-C Kabel (100 cm) × 1
-
TELEM Kabel (30 cm) × 2
-
RSSI Kabel (22 cm) × 1
-
RC IN Kabel (30 cm) × 1
-
CAN PMU2 Lite 15 V Smart Controller Stromkabel (30 cm) × 1
Details

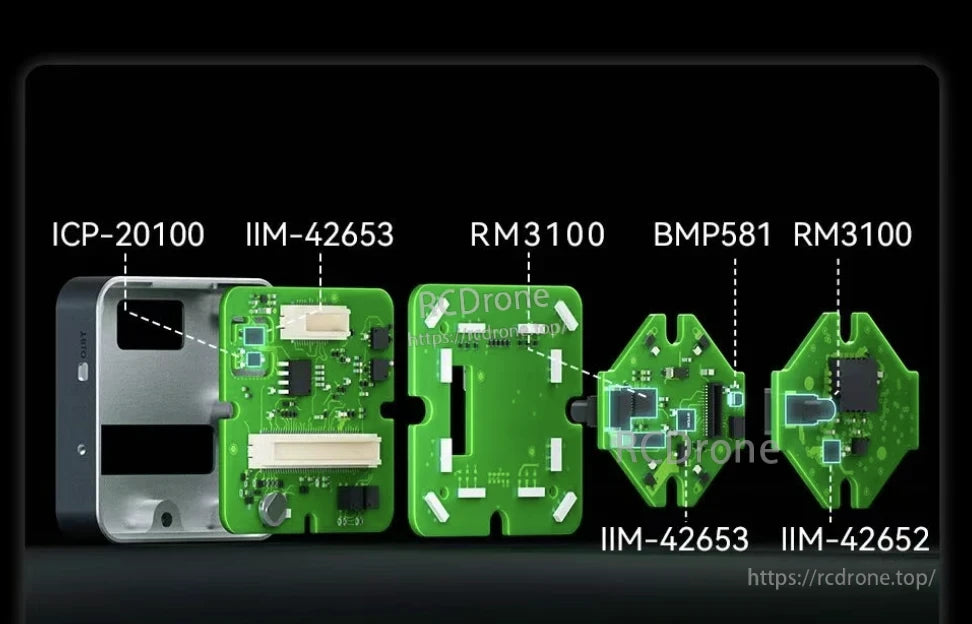
CUAV X25 EVO Flugcontroller-Komponenten, die mit Chip-Modellen gekennzeichnet sind.


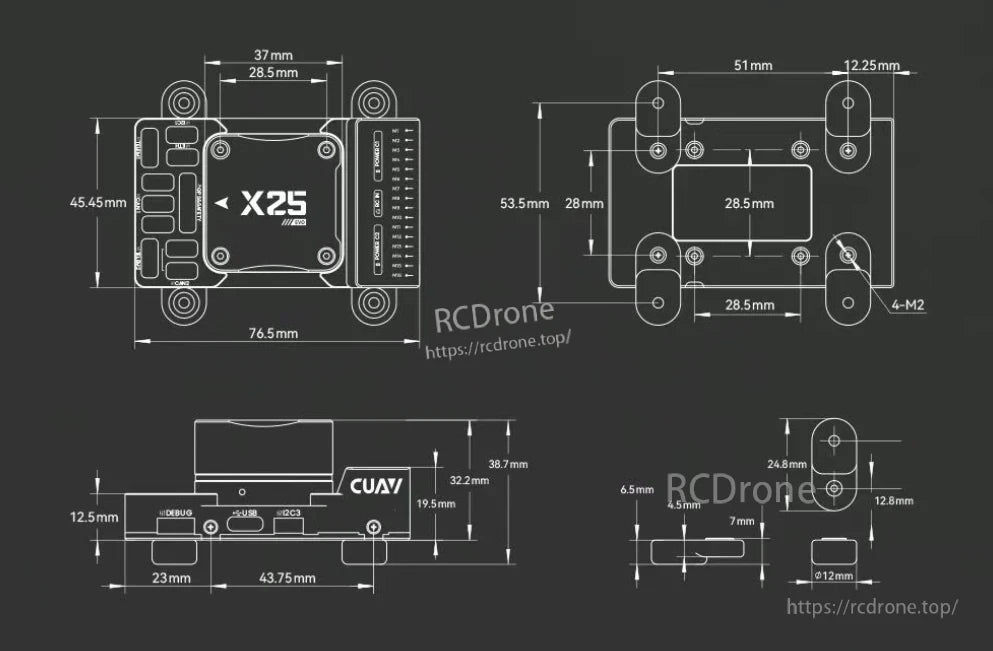
Der CUAV X25 EVO Flugcontroller misst 76,5 mm x 45,45 mm, verfügt über Debug-, USB- und I2C3-Ports und enthält vier M2-Schrauben für eine sichere Montage.

X25 EVO Autopilot umfasst Flugcontroller, Strommodul, CAN-Erweiterungsplatine, Daten- und Telemetrie-Kabel, Typ-C-Kabel, RSSI- und RC IN-Leitungen sowie Stromversorgungsleitung.
Related Collections








