






CubeMars AK10-9 V2.0 Roboterantrieb KV60/KV100 | 18Nm/15Nm Nennmoment, Dual-Encoder, MIT- & Servomodi
CubeMars AK10-9 V2.0 Roboterantrieb KV60/KV100 | 18Nm/15Nm Nennmoment, Dual-Encoder, MIT- & Servomodi
CubeMars
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der CubeMars AK10-9 V2.0 ist ein hochintegrierter robotischer Aktuator, der einen leistungsstarken BLDC-Motor, planetarischen Reduzierer, doppelte Encoder und integrierten Treiber in einer kompakten Einheit vereint. Er unterstützt sowohl den MIT-Strommodus als auch den industriellen Servosteuerungsmodus und bietet sanfte Drehmomentabgabe, präzise Positionierung und schnelle Reaktion, was ihn ideal für beiniges Roboter, Exoskelette und AGVs macht. Erhältlich in KV60- und KV100-Varianten, bietet er bis zu 48Nm Spitzenmoment, mit optimierter Wärmeableitung und Echtzeit-Temperaturüberwachung für langfristige Zuverlässigkeit.
Hauptmerkmale
-
Duale Steuerungsmodi: Unterstützt nahtloses Umschalten zwischen MIT-Strommodus und Servosteuerungsmodus für flexible Bewegungssteuerung.
-
Hohe Drehmomentausgabe: Bis zu 48Nm Spitzenmoment mit stabiler Betriebsweise und geringem Spiel (0,33°).
-
Hochintegriert: Kombiniert Motor, Encoder, Treiber und Planetengetriebe in einer kompakten Form.
-
Ausgangs- & Innencoder: Integrierte 14-Bit Innent und 15-Bit Außent magnetische Encoder gewährleisten präzises Feedback.
-
Kreuzrollenlager: Erhöht die axiale und radiale Lastbeständigkeit und verbessert die Zuverlässigkeit in dynamischen Anwendungen.
-
Temperatursensor innen: Echtzeit-Temperaturüberwachung verhindert Motorschäden unter thermischem Stress.
-
Optimierte Wärmeableitung: Einzigartiges Strukturdesign verbessert das Wärmemanagement und gewährleistet einen stabilen Langzeitbetrieb.
-
Leiser Betrieb: Geräuschpegel von nur 65 dB bei 65 cm (KV60-Version).
Technische Daten
AK10-9 V2.0 K60 Technische Daten
| Anwendung | Beinroboter, Exoskelett, AGV | Spitzenmoment (Nm) | 48 |
| Antriebsart | FOC | Spitzenstrom (ADC) | 29.8 |
| Umgebungstemperatur | -20℃~50℃ | Kv (U/min/V) | 60 |
| Wicklungsart | Stern | Kt (Nm/A) | 0.198 |
| Isolierklasse | C | Ke (V/krpm) | 17.2 |
| Isolierung Hochspannung | 1000V 5mA/2s | Phasen-zu-Phasen Widerstand (mΩ) | 195 |
| Isolationswiderstand | 1000V 10MΩ | Phasen-zu-Phasen Induktivität (μH) | 181 |
| Phase | 3 | Trägheit (gcm²) | 1002 |
| Polpaare | 21 | Km (Nm/√W) | 0.45 |
| Übersetzungsverhältnis | 9:1 | Mechanische Zeitkonstante (ms) | 0.5 |
| Rücklauf (Nm) | 0.8 | Elektrische Zeitkonstante (ms) | 0.93 |
| Spiel (°) | 0.33 | Gewicht (g) | 960 |
| Temperatursensor | NTC MF51B 103F3950 | Maximales Drehmoment-Gewichtsverhältnis (Nm/kg) | 50 |
| Geräuschpegel dB in 65 cm Entfernung vom Motor | 65 | CAN-Anschluss | A1257WR-S-4P |
| Basislastwerte (dyn. C ) N | 2000 | UART-Anschluss | A1257WR-S-3P |
| Grundlastwerte (stat.C0) N | 2520 | Stromanschluss | XT30PW-M |
| Nennspannung (V) | 24/48 | Innenschleifen-Encoder-Typ | Magnetischer Encoder |
| Nennmoment (Nm) | 18 | Auflösung des Innenscheiben-Encoders | 14bit |
| Nennumdrehungen (rpm) | 109/228 | Außenscheiben-Encoder-Typ | Magnetischer Encoder |
| Nennstrom (ADC) | 10.6 | Auflösung des Außenscheiben-Encoders | 15bit |
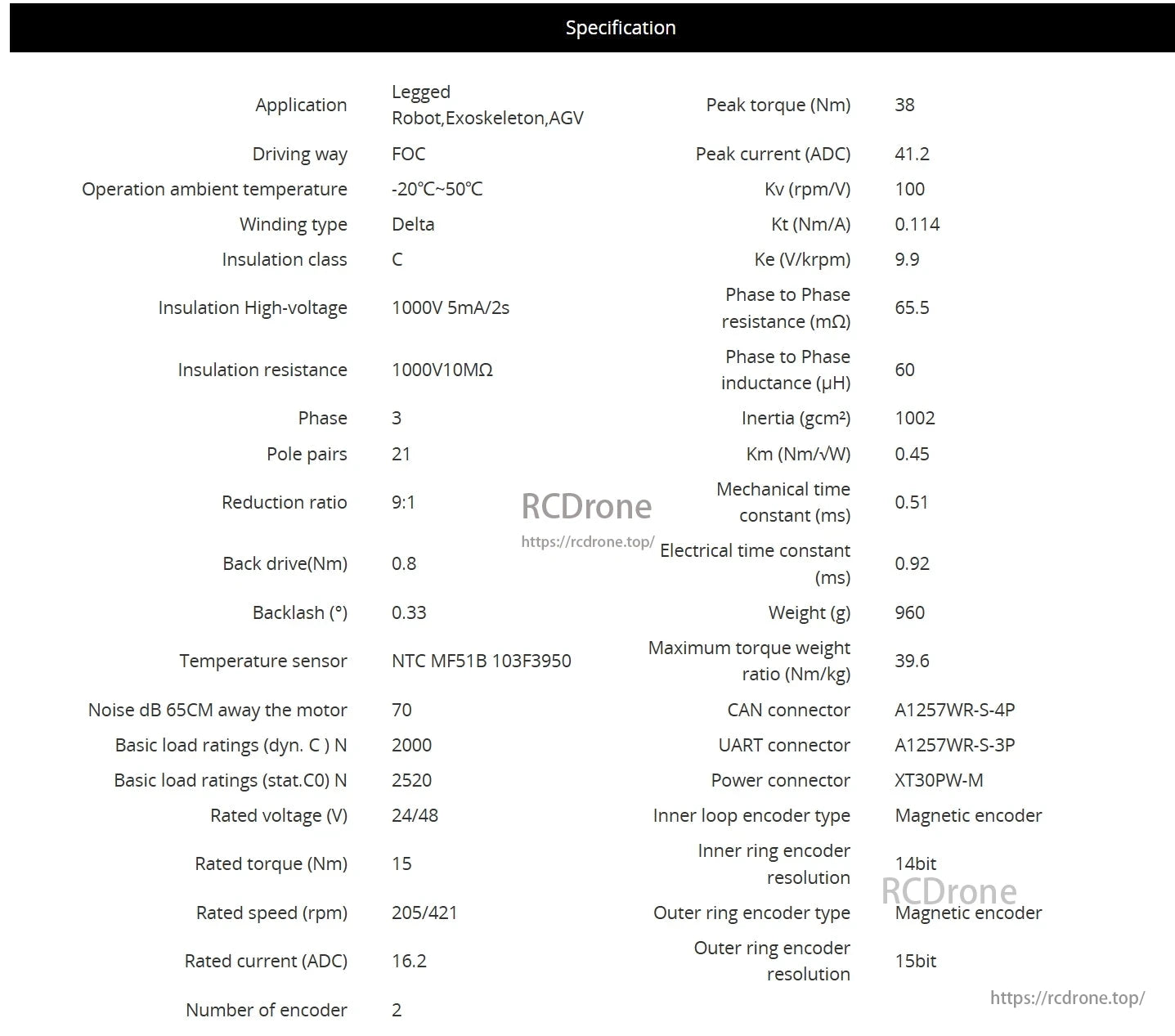
AK10-9 V2.0 KV100 Spezifikationen
| Anwendung | Beinroboter, Exoskelett, AGV | Spitzenmoment (Nm) | 38 |
| Antriebsart | FOC | Spitzenstrom (ADC) | 41.2 |
| Betriebstemperatur | -20℃~50℃ | Kv (U/min/V) | 100 |
| Wicklungsart | Delta | Kt (Nm/A) | 0.114 |
| Isolationsklasse | C | Ke (V/krpm) | 9.9 |
| Hochspannungsisolierung | 1000V 5mA/2s | Phasenwiderstand (mΩ) | 65.5 |
| Isolationswiderstand | 1000V10MΩ | Phaseninduktivität (μH) | 60 |
| Phase | 3 | Trägheit (gcm²) | 1002 |
| Paarpole | 21 | Km (Nm/√W) | 0.45 |
| Übersetzungsverhältnis | 9:1 | Mechanische Zeitkonstante (ms) | 0.51 |
| Rücklauf (Nm) | 0.8 | Elektrische Zeitkonstante (ms) | 0.92 |
| Spiel (°) | 0.33 | Gewicht (g) | 960 |
| Temperatursensor | NTC MF51B 103F3950 | Maximales Drehmoment-Gewichtsverhältnis (Nm/kg) | 39.6 |
| Geräuschpegel dB in 65 cm Entfernung vom Motor | 70 | CAN-Anschluss | A1257WR-S-4P |
| Grundlastwerte (dyn. C) N | 2000 | UART-Anschluss | A1257WR-S-3P |
| Grundlastwerte (stat.C0) N | 2520 | Stromanschluss | XT30PW-M |
| Nennspannung (V) | 24/48 | Innerer Schleifen-Encoder-Typ | Magnetischer Encoder |
| Nennmoment (Nm) | 15 | Auflösung des inneren Ring-Encoders | 14bit |
| Nennumdrehungen (U/min) | 205/421 | Äußerer Ring-Encoder-Typ | Magnetischer Encoder |
| Nennstrom (ADC) | 16.2 | Auflösung des äußeren Ringencoders | 15 Bit |
| Anzahl der Encoder | 2 |
Anwendungen
-
Bionische Beintechnologie
-
Exoskelette für Rehabilitation oder Traglast
-
Autonome Bodenfahrzeuge (AGV)
-
Gelenkmomentregelungssysteme
-
Humanoide und vierbeinige Robotik
Downloads
![]() AK-Serie Treiber- und Steuerungsanleitung v1.0.15.X.pdf
AK-Serie Treiber- und Steuerungsanleitung v1.0.15.X.pdf
Details
CubeMars AK10 Robotic Actuator: 38 Nm Spitzenmoment, 41.2 ADC Spitzenstrom, -20°C bis 50°C Betrieb, 9:1 Übersetzungsverhältnis, 960g Gewicht, 39,6 Nm/kg maximales Drehmoment-Gewichtsverhältnis, 70 dB Geräusch, magnetische Encoder, CAN- und UART-Anschlüsse.

CubeMars AK10 Roboteraktuator: 48 Nm Spitzenmoment, 29,8 A Spitzenstrom, -20°C bis 50°C Betrieb, 1000V Isolierung, 3 Phasen, 21 Polpaare, 9:1 Übersetzungsverhältnis, 960g Gewicht, 50 Nm/kg maximales Drehmoment-Gewichtsverhältnis, magnetische Encoder.

Analyse-Diagramm für CubeMars AK10-9 V2.0 KV60@48VDC actuaktor. Zeigt die Ausgangsleistung (W), Effizienz, Strom (A) und Geschwindigkeit (U/min) im Verhältnis zum Drehmoment (N.m). Die Effizienz erreicht ihren Höhepunkt bei etwa 12 N.m, während die Ausgangsleistung mit dem Drehmoment stetig ansteigt. Der Strom steigt linear an, und die Geschwindigkeit nimmt ab, während das Drehmoment zunimmt. Das Diagramm hebt die Leistungsmerkmale des Aktuators hervor und demonstriert seine Fähigkeit unter variierenden Lasten.Wichtige Kennzahlen umfassen eine maximale Ausgangsleistung von über 800 W und eine Betriebsdrehzahl von bis zu 350 U/min bei niedrigen Drehmomenten. Diese Daten helfen, die Effizienz und die Leistungsdynamik des Aktuators in verschiedenen Anwendungen zu verstehen.
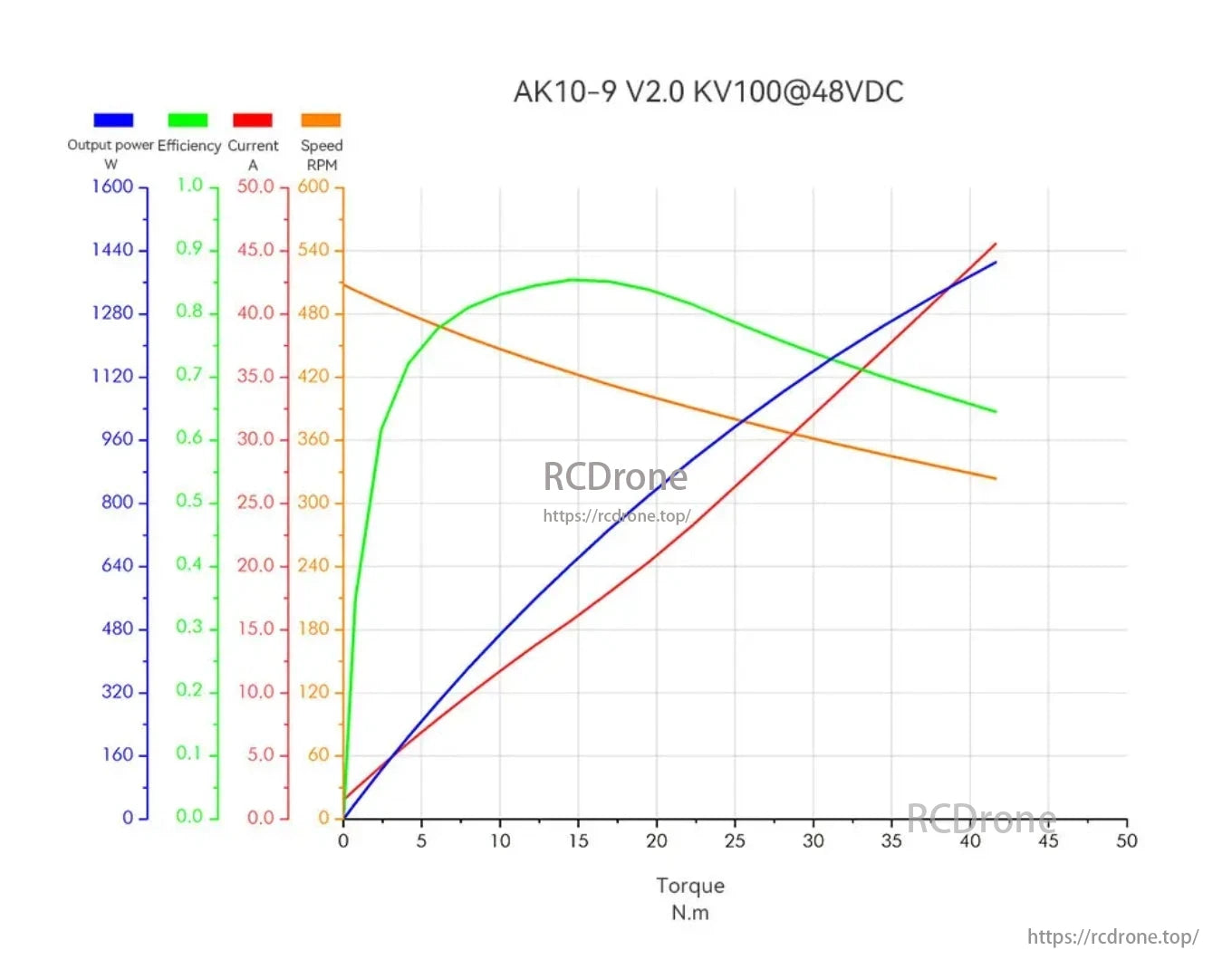
Die Leistung des CubeMars AK10-9 V2.0 KV100@48VDC actuators wird dargestellt. Ausgangsleistung (W), Effizienz, Strom (A) und Drehzahl (U/min) werden in Abhängigkeit vom Drehmoment (N.m) dargestellt. Die Effizienz erreicht ihren Höhepunkt bei etwa 15 N.m, während die Ausgangsleistung linear mit dem Drehmoment ansteigt. Der Strom steigt ebenfalls stetig mit dem Drehmoment. Die Drehzahl nimmt ab, während das Drehmoment zunimmt, beginnend bei etwa 480 U/min bei null Drehmoment. Das Diagramm veranschaulicht die optimalen Betriebsbedingungen für verschiedene Anwendungen und hebt die Fähigkeiten des Aktuators unter verschiedenen Lastbedingungen hervor. Diese Daten helfen bei der Auswahl geeigneter Einstellungen für spezifische Aufgaben.

CubeMars AK10-9 KV60 integrierter Leistungsservo, enthaltene Modi. Roboteraktuator mit FCC, CE, RoHS V2.0 Zertifizierung.

Der Robotic Actuator bietet effiziente Motorsteuerung, präzisen Leistungsmodus und schnellere Reaktion für industrielle Anwendungen.

Der CubeMars AK10 Robotic Actuator umfasst einen Hochleistungs-BLDC-Motor, ein Industrie-Qualitäts-Kreuzrollenlager, einen Temperatursensor, einen Ausgangsencoder, einen dualen Betriebsmodus und einen Planetengetriebe für stabilen Drehmoment.

Optimieren Sie die Struktur und die Wärmeabstrahlung schnell. Verbessern Sie die Wärmeableitung des Motorengehäuses für Langlebigkeit und Stabilität der Antriebsmodulleistung. SN: 1010921081.
Related Collections






