





CubeMars R80 KV110 Motor 48V 3-Phasen FOC mit Hall-Sensoren, Exoskelett & Roboterantrieb
CubeMars R80 KV110 Motor 48V 3-Phasen FOC mit Hall-Sensoren, Exoskelett & Roboterantrieb
CubeMars
Verfügbarkeit für Abholungen konnte nicht geladen werden
Überblick
CubeMars R80 KV110 Motor ist ein 3-Phasen-Motor, der für Exoskelette und Robotikanwendungen vorgesehen ist, mit integrierten Hall-Sensoren und Unterstützung für FOC (feldorientierte Steuerung). Er verfügt über ein spezielles Wärmeableitungsdesign und eine steckerartige Schnittstelle, um die Installation zu vereinfachen.
Hauptmerkmale
- Integrierte Hall-Sensoren
- Elektrische Winkelgenauigkeit Abweichung: ±10°
- Besonderes Wärmeableitungsdesign (ultra-dünner Sockel & hochleitfähige Silikonmatte; reduzierte Gesamtlänge zur Verbesserung der Wärmeableitung)
- Musterlochdesign an der Glocke für die Getriebeinstallation (harmonisches Getriebe, Flansch oder andere Getriebetypen)
- Steckverbindungsdesign für einfachere Installation (ersetzt traditionelle Drähte)
- Analytisches Motorbetriebsdiagramm bereitgestellt (Geschwindigkeit vs. Drehmoment bei 48V; Nichtbetrieb / Kurzzeitbetrieb / Dauerbetrieb Zonen)
Technische Daten
| Anwendung | Exoskelett |
| Antriebsart | FOC |
| Betriebstemperatur | -20℃~50℃ |
| Wicklungsart | Delta |
| Isolierklasse | H |
| Isolierung Hochspannung | 1000V 5mA/2s |
| Isolationswiderstand | 1000V10MΩ |
| Phase | 3 |
| Paarpole | 21 |
| Nennspannung (V) | 48 |
| Leerlaufdrehzahl (U/min) | 4320 |
| Nennmoment (Nm) | 1.3 |
| Bewertete Geschwindigkeit (U/min) | 3580 |
| Bewerteter Strom (ADC) | 12.3 |
| Spitzenmoment (Nm) | 4 |
| Spitzenstrom (ADC) | 38.6 |
| Kv (U/min/V) | 90 |
| Kt (Nm/A) | 0.107 |
| Ke (V/krpm) | 10.58 |
| Phasenwiderstand (mΩ) | 125 |
| Phaseninduktivität (μH) | 87 |
| Trägheit (gcm²) | 759.98 |
| Km (Nm/√W) | 0.3026 |
| Mechanische Zeitkonstante (ms) | 0.83 |
| Elektrische Zeitkonstante (ms) | 0.70 |
| Gewicht (g) | 354 |
| Maximales Drehmoment-Gewichtsverhältnis (Nm/kg) | 11.3 |
| Motorphase U V W | Referenz-Konstruktionszeichnung |
| Hall-Sensoranschluss | VCC, GND, Hu, Hv, HW (Referenz-Konstruktionszeichnung) |
| Korrespondenz | Hu-U; Hv-V; Hw-W |
Anwendungen
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadruped-Roboter
- AGV-Fahrzeuge
- ARU-Roboter
Handbücher / Dokumente
Für Fragen zur Verkabelung/Fahrer-Auswahl oder Dokumentationshilfe kontaktieren Sie den Support über https://rcdrone.top/ oder per E-Mail [email protected].
Hinweis aus dem bereitgestellten Diagramm: Alle Daten dienen nur zu Informationszwecken | Änderungen vorbehalten.
Details

CubeMars R80 KV110 ist für kompakte Robotergelenke und Exoskelettantriebe konzipiert, mit einem flachen Aktuator-Stil-Formfaktor.

Integrierte Hall-Sensoren bieten Rotorpositionsrückmeldung für eine stabile FOC-Steuerung, mit einer elektrischen Winkelgenauigkeitsabweichung von ±10°.

Ein spezielles Wärmeableitungsdesign verwendet eine ultradünne Basis und eine hochwärmeleitende Silikonmatte, um die Temperatur in kompakten Bauformen zu steuern.

Die Musterbohrungen an der Glocke erleichtern das Anbringen eines harmonischen Getriebes, Flansches oder anderer Getriebearten.
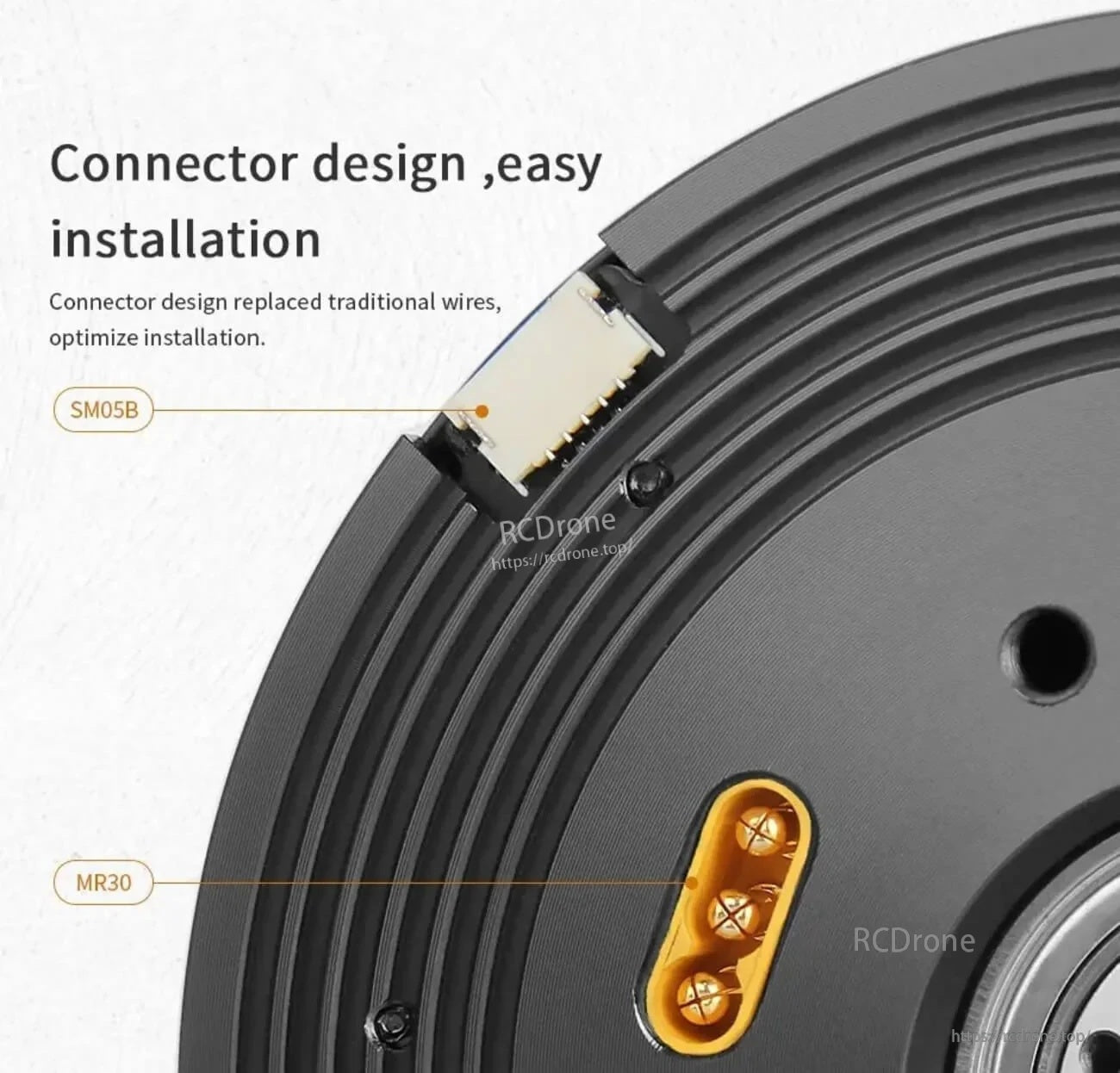
Steckerartige Verkabelungen ersetzen traditionelle lose Leitungen für eine sauberere, schnellere Installation von Strom- und Sensorschnittstellen.
Optimiertes elektromagnetisches Design zielt auf ein niedriges Ruckmoment und eine niedrige Rotorträgheit für eine sanftere Bewegungssteuerung.

Entwickelt für schwerlastfähige, beinbetriebene Roboter und andere Anwendungen mit hohem Drehmoment, bei denen eine stabile Leistung wichtig ist.

Das 48V Geschwindigkeits-gegen-Drehmoment-Betriebsdiagramm hilft, einen sicheren kontinuierlichen Bereich auszuwählen und die kurzfristige Spitzenfähigkeit zu verstehen.
Related Collections





