




CubeMars RI60 KV120 Rahmenloser Inrunner-Torquemotor | 0,57 Nm, 120KV, 48V BLDC für Cobot & Exoskelett
CubeMars RI60 KV120 Rahmenloser Inrunner-Torquemotor | 0,57 Nm, 120KV, 48V BLDC für Cobot & Exoskelett
CubeMars
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der CubeMars RI60 KV120 rahmenlose Inrunner-Drehmomentmotor ist für kompakte, leistungsstarke Roboteranwendungen konzipiert. Er unterstützt 24V/36V/48V Betriebsspannungen, dieser rahmenlose BLDC-Motor bietet hohe Drehmomentdichte, sanfte, geringe Ruckbewegungen und präzise Steuerungsauflösung von 0,01°. Mit einem kompakten Außendurchmesser von Φ60mm und einem Gewicht von nur 155,9g ist er ideal für Cobot-Arme, Exoskelette und robotische Gelenke mit engen Platzverhältnissen.
Dieser Motor verfügt über einen handgewickelten Stator für einen optimalen Kupferfüllfaktor, gekrümmte Permanentmagneten für eine effiziente sinusförmige BEMF-Antwort und Optionen für die Integration von Hall-Sensoren und Encodern.Es unterstützt feldorientierte Regelung (FOC), arbeitet zuverlässig von -20°C bis 50°C und hält bis zu 1,63 Nm Spitzenmoment stand. Die erhöhte Rotorversion verbessert die Genauigkeit des Hall-Sensors, indem sie den Erfassungsbereich um 2 mm erhöht.
Hauptmerkmale
-
Rahmenloses Inrunner BLDC-Design – Kein äußeres Gehäuse, ideal für integrierte Installationen
-
Hohe Drehmomentdichte – Maximaler Drehmoment-zu-Gewicht-Verhältnis von 10,46 Nm/kg
-
Präzisionssteuerung – Kompatibel mit hochauflösenden Encodern, unterstützt 0.01° Positionierung
-
Niedriges Ruckmoment – Sanfter Betrieb, reduzierte Vibration und Geräusch
-
Temperaturtolerant – Betriebstemperaturen von -20°C bis 50°C
-
Mehrere Steuerinterfaces – Unterstützt Encoder- und Hall-Sensor-Feedback
-
Handgewickelter Stator – Ausgezeichnete Kupferfüllung, 0.5mm Randabstand für einfache Montage
-
Optionale Rotorversion – +2mm Rotorhöhe verbessert die Ausrichtung des Hall-Sensors
Technische Spezifikationen
Anwendung & Konfiguration
| Parameter | Wert |
|---|---|
| Anwendung | Cobot Arm / Exoskelett |
| Antriebsart | FOC |
| Phase | 3 Phasen |
| Wicklungstyp | Delta |
| Paarpole | 14 |
| Isolationsklasse | C |
| Isolationsspannung | 500V 5mA/2s |
| Isolationswiderstand | 500V 10MΩ |
| Betriebstemperatur | -20℃ ~ 50℃ |
Elektrische Eigenschaften
| Parameter | Wert |
|---|---|
| Nennspannung (V) | 24 / 36 / 48 |
| Leerlaufdrehzahl (U/min) | 2532 / 3798 / 5064 |
| Nenn-Drehzahl (U/min) | 1440 / 2320 / 3190 |
| Nennmoment (Nm) | 0.57 |
| Spitzenmoment (Nm) | 1.63 |
| Nennstrom (ADC) | 5.6 |
| Spitzenstrom (ADC) | 16.8 |
| Kv (U/min/V) | 120 |
| Ke (V/krpm) | 9.03 |
| Kt (Nm/A) | 0.100 |
| Phasenwiderstand (mΩ) | 900 |
| Phaseninduktivität (μH) | 877.5 |
| Trägheit (g·cm²) | 33.05 |
| Km (Nm/√W) | 0.1054 |
| Mechanische Zeitkonstante (ms) | 0.3 |
| Elektrische Zeitkonstante (ms) | 0.98 |
| Gewicht (g) | 155.9 |
| Drehmoment/Gewichtsverhältnis | 10.46 Nm/kg |
Encoder- & Hall-Sensor-Optionen
-
Mit Hall-Sensor: Verbesserte Rotorerfassung, empfohlen für hochgenaue Positionsbestimmung
-
Ohne Hall-Sensor: Kompakte Bauweise für eingeschränkte Umgebungen
-
Unterstützte Encoder: Renishaw, Sick, andere hochpräzise Encoder (0.01° Auflösung)
Mechanische Abmessungen
| Version | Äußerdurchmesser | Innendurchmesser | Rotorhöhe | Maximale Dicke |
|---|---|---|---|---|
| Ohne Hall | Ø60 mm | Ø30 mm | 15 mm | 21 mm (max) |
| Mit Hall | Ø60 mm | Ø30 mm | 15 mm | 23 mm (max) |
Bitte beachten Sie die technischen Zeichnungen für genaue Toleranzen und Bohrungsmuster.
Leistungskennlinie
Getestet bei 24VDC:
-
Maximale Effizienz bei ~0,3 Nm
-
Spitzenleistung >125W bei ~1.1 Nm
-
Maximale Geschwindigkeit ~2500 U/min
-
Stabile Stromantwort über den gesamten Drehmomentbereich
Verdrahtungs- & Anschlussinformationen
| Draht | Farbe + Größe |
|---|---|
| U | Schwarz + 18# Silikon |
| V | Gelb + 18# Silikon |
| W | Rot + 18# Silikon |
| Hu | Blau + 30# Silikon |
| Hv | Grün + 30# Silikon |
| Hw | Gelb + 30# Silikon |
| VCC | Rot + 30# Silikon |
| GND | Schwarz + 30# Silikon |
Verdrahtungsplan:
Hu-U, Hv-V, Hw-W
Handbuch-Downloads
Anwendungen
-
Kollaborative Roboterarme
-
Exoskelett-Gelenke
-
Beinroboter und Vierbeiner
-
Präzisionsmedizinische Robotik
-
Eingebettete Servomodule
Details
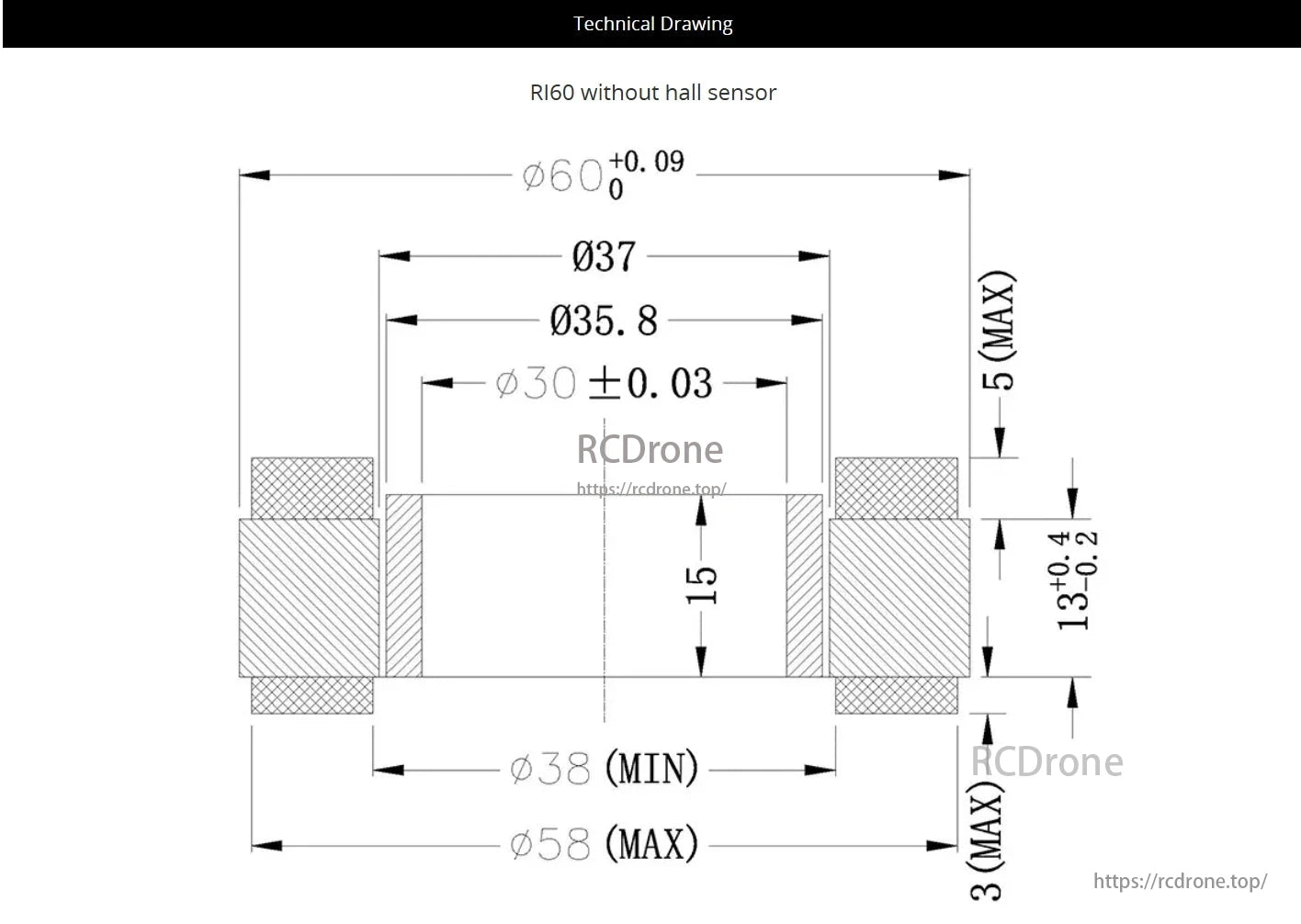
CubeMars RI60 Motorabmessungen: Ø60, Ø37, Ø35.8, Ø30, Ø38 (min), Ø58 (max), 15 Länge, 5 max Höhe, 13 ±0.4 Breite.
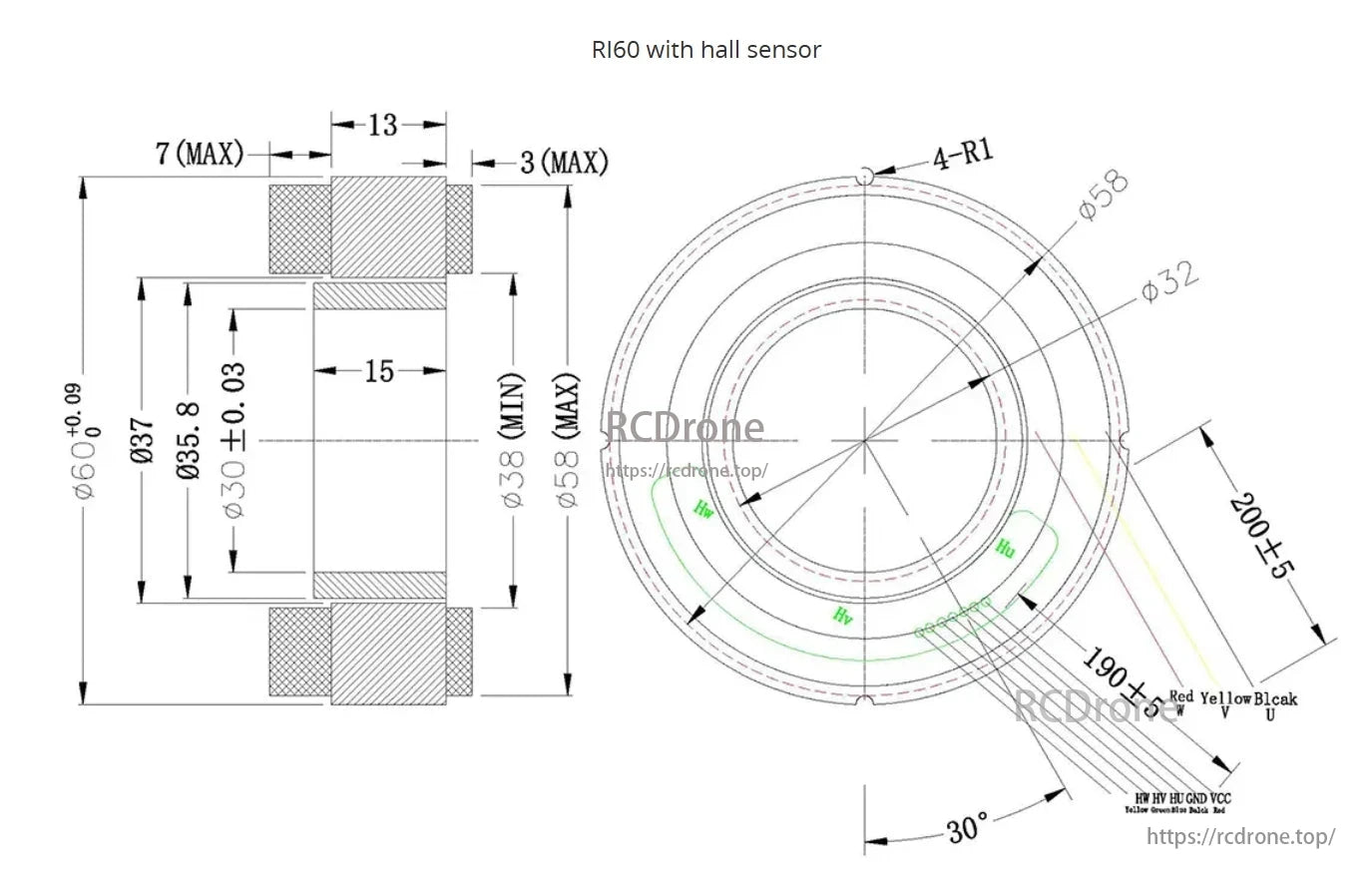
CubeMars RI60 Motor mit Hall-Sensor. Abmessungen: 60mm Durchmesser, 200mm Länge. Merkmale: 4-R1, φ58, φ32 und 30° Winkelmarkierungen. Enthält HW-, HV-, HU-Labels.
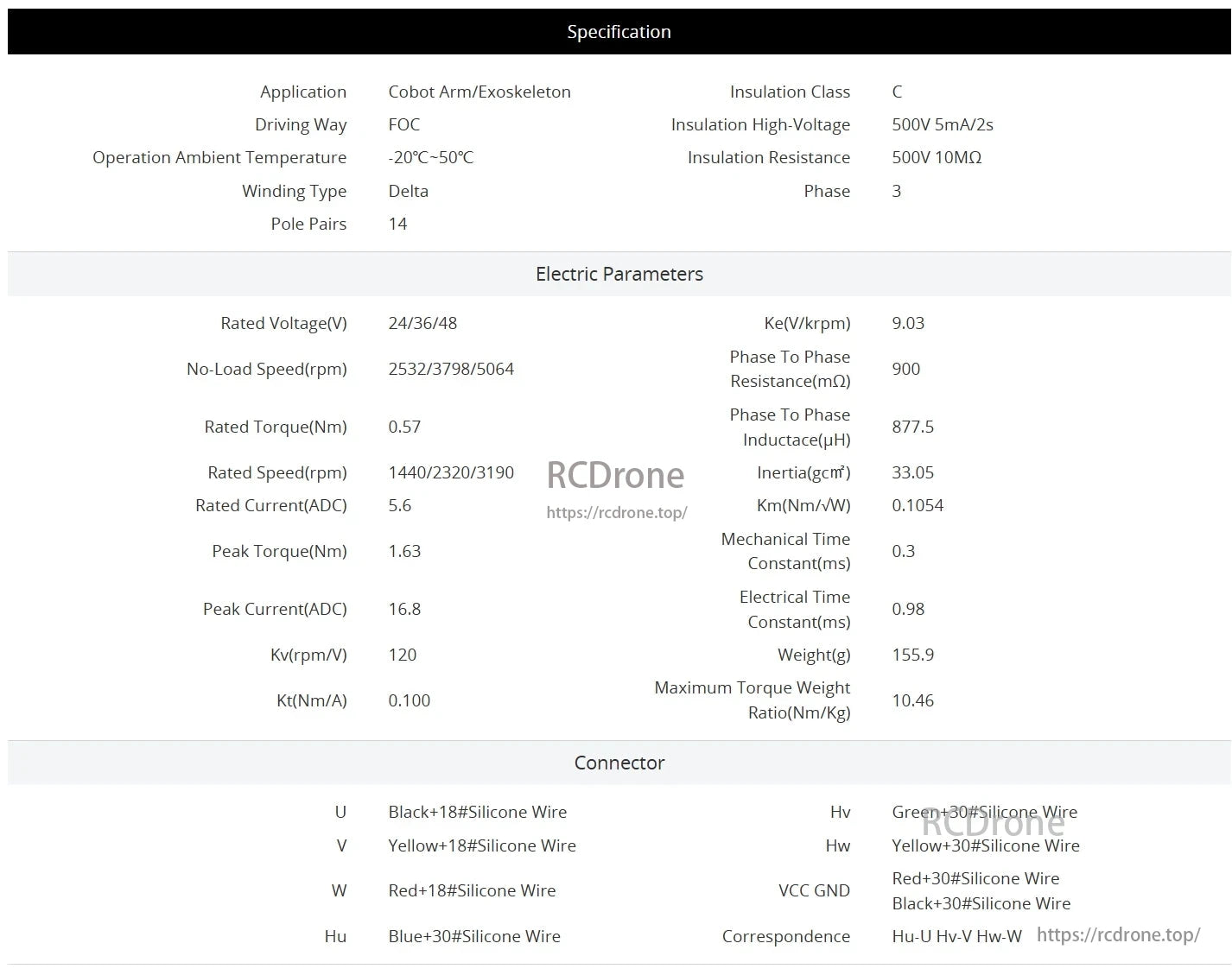
CubeMars RI60 Motor: Cobot Arm/Exoskelett-Anwendung, FOC-Antrieb, -20°C-50°C Betrieb, 14 Polpaare. Nennspannung 24/36/48V, Leerlaufdrehzahl 2532/3798/5064 U/min, Nennmoment 0.57Nm, Spitzenmoment 1.63Nm.
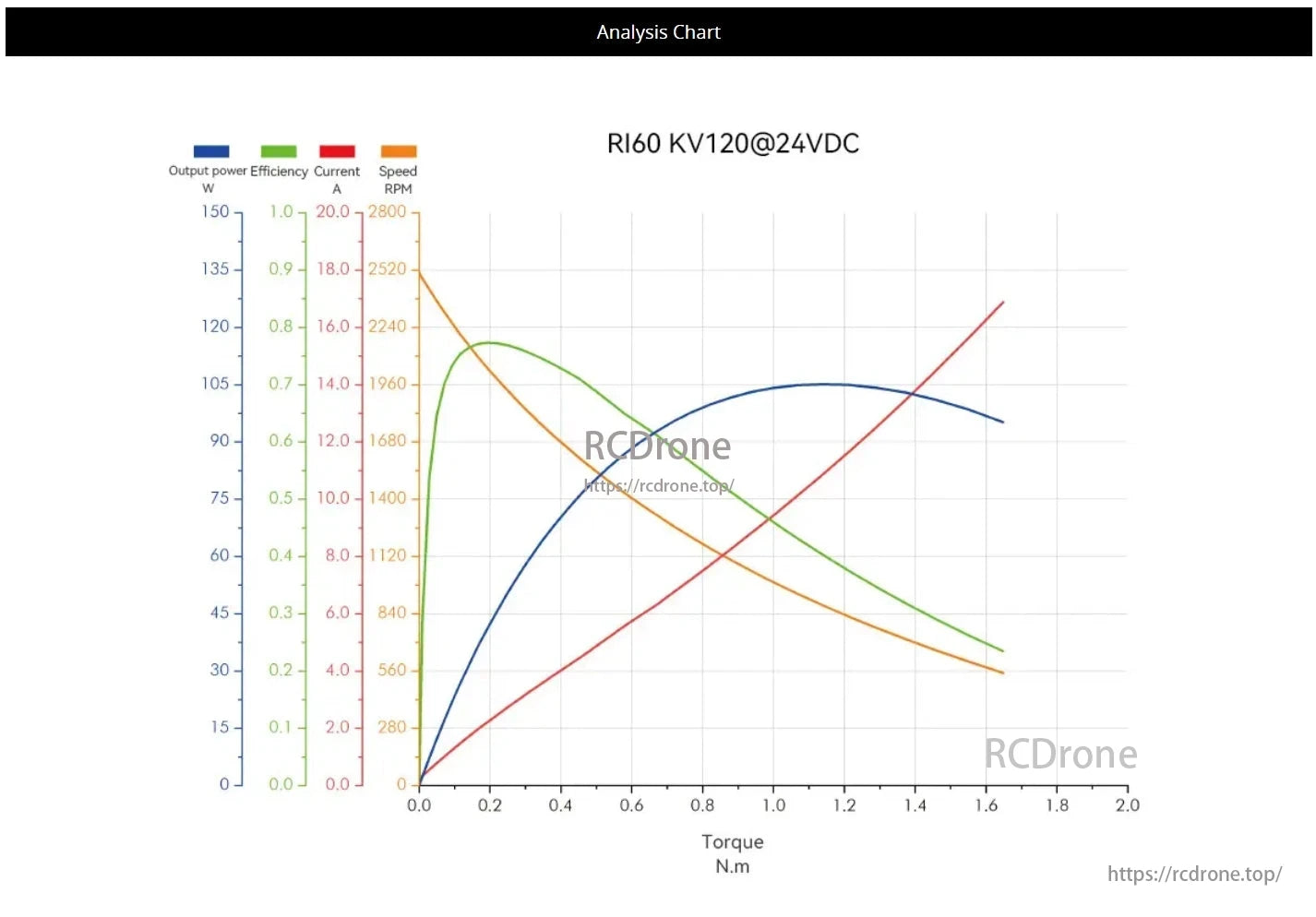
CubeMars RI60 Motoranalyse-Diagramm bei KV120@24VDC. Dispzeigt Ausgangsleistung, Effizienz, Strom und Geschwindigkeit in Abhängigkeit vom Drehmoment. Die Effizienz erreicht ihren Höhepunkt bei etwa 0.2 N.m, wobei die Geschwindigkeit abnimmt, wenn das Drehmoment zunimmt.
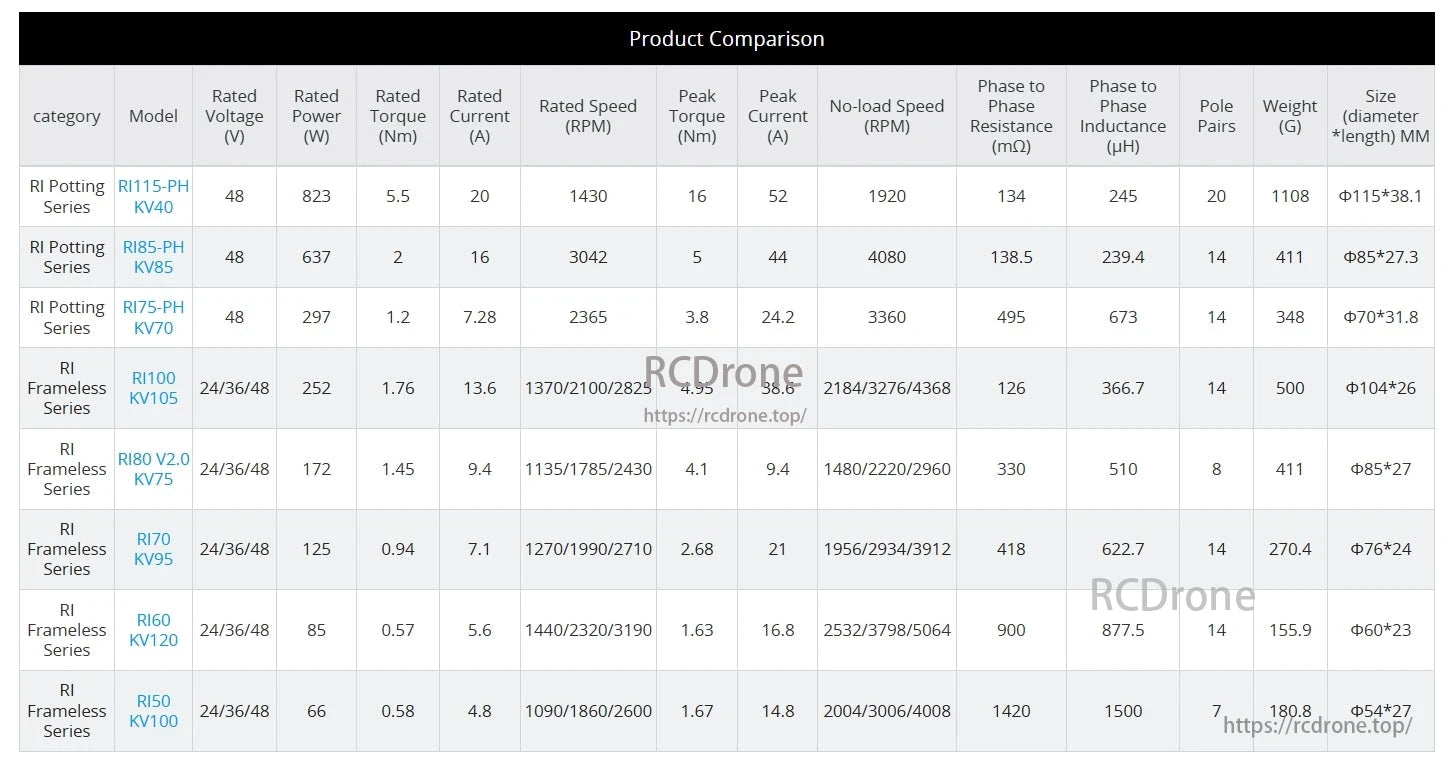
CubeMars RI60 KV120 Motor: 24/36/48V, 85W, 0.57Nm Drehmoment, 5.6A Strom, 1440/2320/3190 U/min Geschwindigkeit, 1.63Nm Spitzenmoment, 16.8A Spitzenstrom, 900mΩ Widerstand, 877.5µH Induktivität, 14 Polpaare, 155.9g Gewicht, φ60*23mm Größe.

CubeMars RI60 Motor: Geringeres Ruckmoment, sanfter Lauf, geringe Geräuschentwicklung, starke Dynamik.

Handgewickelter Stator mit 0,5 mm Spiel für optimale Leistung.

Gebogener Permanentmagnet für das BEMF-Sinus-Motor-Design, das eine einfache Steuerung gewährleistet.

RI60 Rotor, erhöhte Version. Gesamthöhe um 2 mm erhöht für bessere Hall-Sensor-Erfassung.
CubeMars RI60 Motor: -40°C bis 85°C, hochauflösende Encoder-Optionen.
Related Collections




