




CubeMars RI70 KV95 bürstenloser Innenläufer-Drehmomentmotor | 24–48V, 2,68Nm Spitze, 270g, geeignet für Cobot/Exoskelett
CubeMars RI70 KV95 bürstenloser Innenläufer-Drehmomentmotor | 24–48V, 2,68Nm Spitze, 270g, geeignet für Cobot/Exoskelett
CubeMars
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der CubeMars RI70 KV95 ist ein leistungsstarker rahmenloser Inrunner-Drehmomentmotor, der speziell für kollaborative Roboterarme, Exoskelette und andere präzisionsgesteuerte Roboteranwendungen entwickelt wurde. Er arbeitet mit 24V bis 48V und liefert ein Spitzenmoment von 2,68 Nm, ein Nennmoment von 0,94 Nm und unterstützt den Hochgeschwindigkeitsbetrieb von bis zu 3912 U/min. Der RI70-Motor verfügt über geringeren Ruckmoment, 0,01° ultra-hohe Auflösungskontrolle und eine kompakte rahmenlose Architektur, die eine flexible Integration in verschiedene Strukturdesigns ermöglicht. Erhältlich in zwei Versionen—mit oder ohne Hall-Sensor—unterstützt er hochpräzise Anwendungen, die Echtzeit-Feedback und adaptive Dynamik erfordern.
Hauptmerkmale
-
Nennspannung: 24V / 36V / 48V
-
KV-Bewertung: 95 U/min/V
-
Spitzenmoment: 2,68 Nm
-
Hohe Präzision: 0,01° Encoder-Kompatibilität (Renishaw, Sick usw.)
-
Niedriges Ruckmoment: Ermöglicht einen reibungslosen, geräuscharmen Betrieb
-
Rahmenloses Inrunner-Design: Kompakt, leicht (270.4g), und einfach zu integrieren
-
Unterstützt FOC (Feldorientierte Steuerung)
-
Arbeitsbereich der Temperatur: -20°C bis 50°C
-
Hoher Kupferfüllfaktor & gebogene Permanentmagneten: Für verbesserte Drehmomentdichte
-
Optionale Rotor-Höhenversion: +2mm für optimierte Hall-Sensordetektion
Mechanische Zeichnungen
RI70 ohne Hall-Sensor:
-
Äußerdurchmesser: Ø76 mm (+0.08/-0.02)
-
Innerer Wellenloch: Ø38 ±0.03 mm
-
Gehäuselänge: 15 mm
-
Maximale Gesamtlänge: 73 mm
-
Montagetiefe: 6.5 mm (max)
RI70 mit Hall-Sensor:
-
Rotorrhöhe um 2 mm erhöht
-
Integrierte PCB mit Winkelanordnung für Hall-Signaldrähte
-
Zusätzlicher Montageabstand: 13 mm
-
Kabellänge: 190 ± 5 mm
Elektrische Spezifikationen
| Parameter | Wert |
|---|---|
| Nennspannung (V) | 24 / 36 / 48 |
| Leerlaufdrehzahl (U/min) | 1956 / 2934 / 3912 |
| Nenndrehzahl (U/min) | 1270 / 1990 / 2710 |
| Nennmoment (Nm) | 0.94 |
| Spitzenmoment (Nm) | 2.68 |
| Nennstrom (ADC) | 7.1 |
| Spitzenstrom (ADC) | 21 |
| Phasenwiderstand (mΩ) | 418 |
| Phaseninduktivität (µH) | 622.7 |
| Ke (V/krpm) | 11.69 |
| Kt (Nm/A) | 0.130 |
| Kv (rpm/V) | 95 |
| Trägheit (g·cm²) | 92.15 |
| Km (Nm/√W) | 0.2011 |
| Mechanische Zeitkonstante (ms) | 0.23 |
| Elektrische Zeitkonstante (ms) | 1.49 |
| Gewicht (g) | 270.4 |
| Drehmoment-Gewichts-Verhältnis | 9.91 Nm/kg |
Verdrahtungs- & Anschlussdetails
| Signal | Drahtfarbe | Drahtstärke |
|---|---|---|
| U | Schwarz | 16# Silikon |
| V | Gelb | 16# Silikon |
| W | Rot | 16# Silikon |
| Hu | Blau | 30# Silikon |
| Hv | Grün | 30# Silikon |
| Hw | Blau | 30# Silikon |
| VCC | Rot | 30# Silikon |
| GND | Schwarz | 30# Silikon |
Encoder Verdrahtungszuordnung:
Hu → U, Hv → V, Hw → W
Leistungskennlinie (RI70 KV95 @ 24VDC)
-
Maximale Effizienz erreicht bei etwa 0.3 Nm Drehmoment
-
Die Leistungsabgabe erreicht ~220W bei 2,6 Nm
-
Optimal für Hochgeschwindigkeits-, Niedriglast- und sanfte dynamische Steuerungsumgebungen
Bauhöhepunkte
-
Handgewickelter Stator: Für hohe Drehmomentdichte und dynamische Reaktion
-
Gebogene Permanentmagneten: Entwickelt für sinusoidale BEMF-Steuerung
-
0.5mm Abstand: Ermöglicht präzise Montage und Luftstrom
-
Breiter Betriebsbereich: Unterstützt Umgebungstemperaturen von -20°C bis +50°C
-
Optionale erhöhte Rotorhöhe: Verbessert die magnetische Kopplung bei Verwendung mit Hall-Sensoren
Anwendungen
-
Kollaborative Roboter (Cobot) Gelenke
-
Exoskelett-Aktoren
-
Präzisionsindustriellen Arme
-
Rehabilitation und unterstützende Robotik
-
Forschungs- und Bildungsplattformen
Encoder-Kompatibilität (optional)
-
Hochauflösende absolute Encoder-Optionen (e.g., Renishaw, Sick)
-
Auflösung bis zu 0.01°
-
Encoder-Montageunterstützung in die Motorgeometrie integriert
Details

CubeMars RI70 Motorabmessungen: Ø76, Ø47, Ø45.8, Ø38, Ø48 (min), Ø73 (max), 15 Länge, 6.5 max Höhe.

CubeMars RI70 Motorabmessungen: 76mm Höhe, 73mm Durchmesser. Verfügt über einen Hall-Sensor, 4-R1.5 Löcher, 200±5mm Länge, 190±5mm Breite und 25° Winkel.

CubeMars RI70 Motor: Cobot-Arm/Exoskelett-Anwendung, FOC-Antrieb, -20°C-50°C Betrieb, 14 Polpaare. Nennspannung 24/36/48V, Leerlaufdrehzahl 1956/2934/3912 U/min, Nennmoment 0.94Nm, Spitzenmoment 2.68Nm. Gewicht 270.4g.
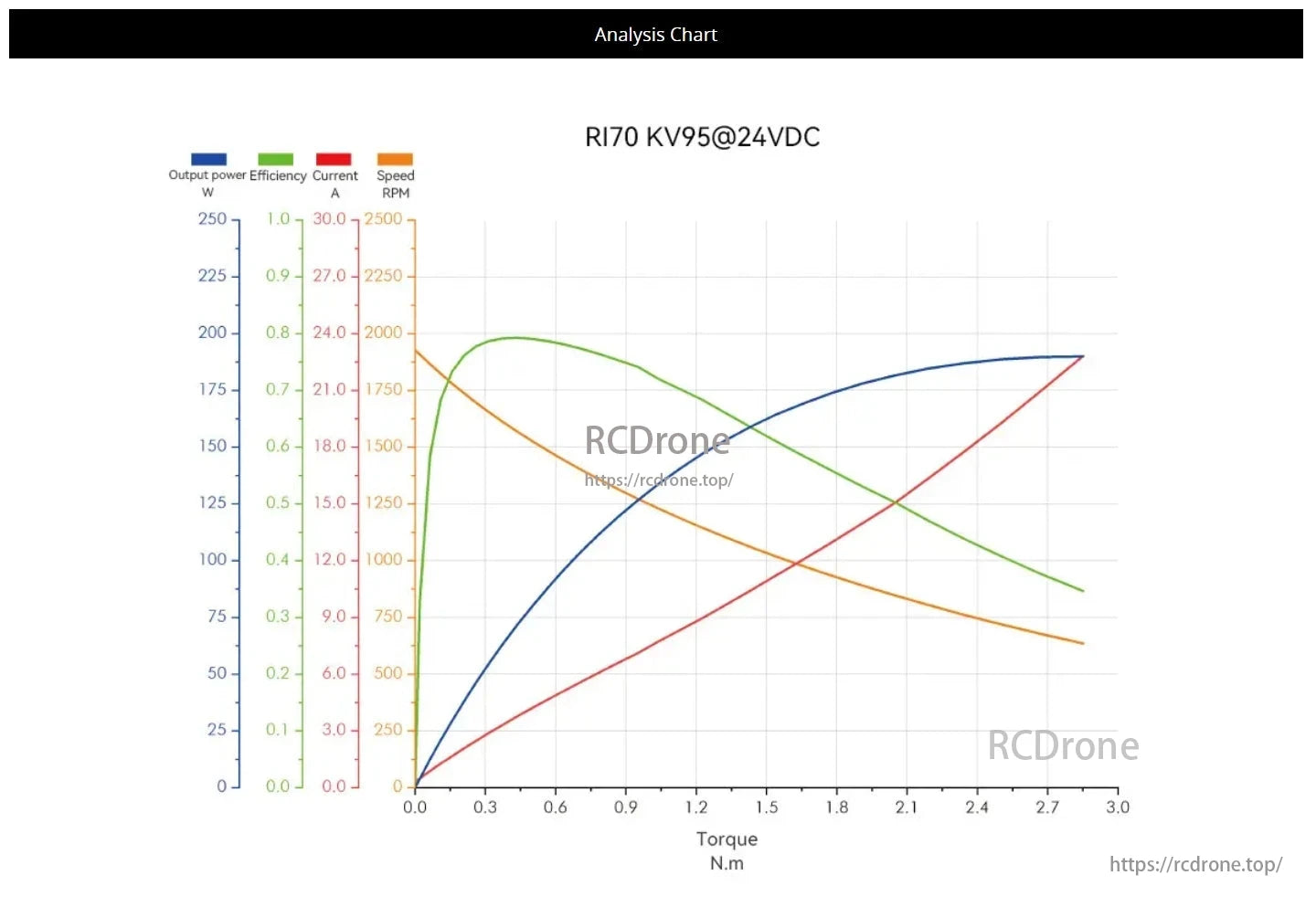
Analyse-Diagramm für RI70 KV95@24VDC motor. Zeigt Ausgangsleistung, Effizienz, Strom und Geschwindigkeit in Abhängigkeit vom Drehmoment an. Das Diagramm hebt die Leistungskennzahlen unter verschiedenen Bedingungen hervor.

CubeMars RI70 Motor: Geringeres Ruckmoment, sanfter Lauf, geringe Geräuschentwicklung, starke Dynamik.

Handgewickelter Stator mit 0,5 mm Spiel für hohe Drehmomentdichte.

Gekrümmtes Permanentmagnet-BEMF-Sinusmotor-Design für einfache Steuerung.

RI70 Rotor Hochversion: Gesamthöhe um 2 mm erhöht für verbesserte Hall-Sensor-Erfassung.

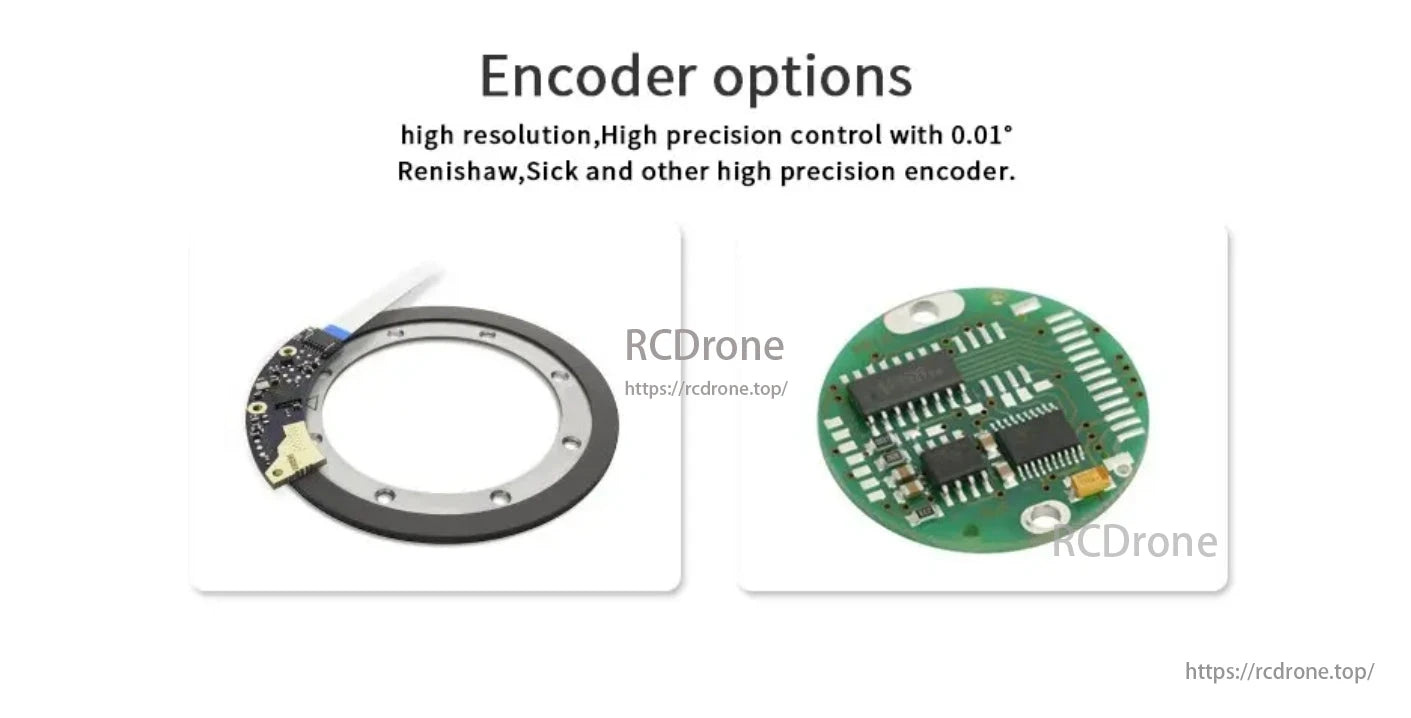
Encoder-Optionen: Hohe Auflösung, hochpräzise Steuerung mit 0,01° Genauigkeit. Enthält Renishaw, Sick und andere hochpräzise Encoder.
Related Collections




