




DAMIAO DM-J4310-2EC Robotermotor, 24V, 3 N·m Nennmoment, 7 N·m Spitzenmoment, 120 U/min, CAN@1Mbps, UART@921600bps
DAMIAO DM-J4310-2EC Robotermotor, 24V, 3 N·m Nennmoment, 7 N·m Spitzenmoment, 120 U/min, CAN@1Mbps, UART@921600bps
DAMIAO
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
DAMIAO DM-J4310-2EC ist ein kompakter Robotermotor mit integriertem Getriebe und dualen magnetischen Encodern für präzise Bewegungssteuerung. Er arbeitet mit 24 V und bietet ein nominales Drehmoment von 3 N.M, ein Spitzen-Drehmoment von 7 N.M und eine nominale Geschwindigkeit von 120 U/min über eine 10:1 Reduktionsstufe. Steuerung und Konfiguration werden über CAN@1Mbps und UART@921600bps unterstützt.
Hauptmerkmale
- 24 V Betrieb mit 2,5A nominalem und 7,5A Spitzenstrom
- 10:1 Reduktion für hohe Drehmomentausgabe: 3 N.M nominal, 7 N.M Spitze
- Duale Einzelumdrehung magnetische Encoder, 14Bit Auflösung
- Kompakte Größe und leicht: 57mm Außendurchmesser, 46mm Höhe, 300g
- CAN@1Mbps Steuerungsschnittstelle; UART@921600bps Konfiguration
Spezifikationen
| Parameter | Wert |
|---|---|
| Modell | DM-J4310-2EC |
| Nominalspannung | 24 V |
| Nennstrom | 2.html 5A |
| Spitzenstrom | 7.5A |
| Nennmoment | 3 N.M |
| Spitzenmoment | 7 N.M |
| Nennumdrehungen | 120 U/min |
| Max. | html|
| Leerlaufdrehzahl | 200 U/min |
| Übersetzungsverhältnis | 10:1 |
| Paarpole | 14 |
| Phaseninduktivität | 340uH |
| Phasenwiderstand | 650 mOhm |
| Äußerer Durchmesser | 57mm |
| Höhe | 46mm |
| Motorgewicht | 300g |
| Encoderauflösung | 14Bit |
| Encoderanzahl | 2 |
| Encodertyp | Ein-Turn Magnetencoder |
| Steuerungsschnittstelle | CAN@1Mbps |
| Konfigurationsschnittstelle | UART@921600bps |
Motorabmessungen
- Äußerer Durchmesser: 57mm
- Gesamthöhe: 46mm; Gehäuselänge: 45mm
- Vorderseite Schraubenkreis: 6 x M3, Bovertiefe 5; Kreisdurchmesser 50mm
- Rückseite Schraubenkreis: 4 x M3, Bovertiefe 4; Kreisdurchmesser 38mm
- Innerer Kreis: 24. html 30mm
- Drei Löcher: 4mm (+0.04 / +0.02)
- Zwei Löcher: 3mm (+0.04 / +0.02), Tiefe 5
- Merkmalwinkel: 15°
Anwendungen
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadruped-Roboter
- AGV-Fahrzeuge
- ARU-Roboter
Open Source Integration
OpenArm ist ein vollständig Open-Source humanoider Roboterarm, der für die Forschung und den Einsatz von physischer KI in kontaktreichen Umgebungen entwickelt wurde.
Handbücher
- DAMIAO_DM_J4310_2EC_V1.1_Motor.stp
- DM-J4310-2EC_Gear_Motor_Instructions.pdf
- DM_J4310_V1.1_Installationszeichnung.pdf
Details

Technische Zeichnung des Robotermotors mit Abmessungen und Spezifikationen
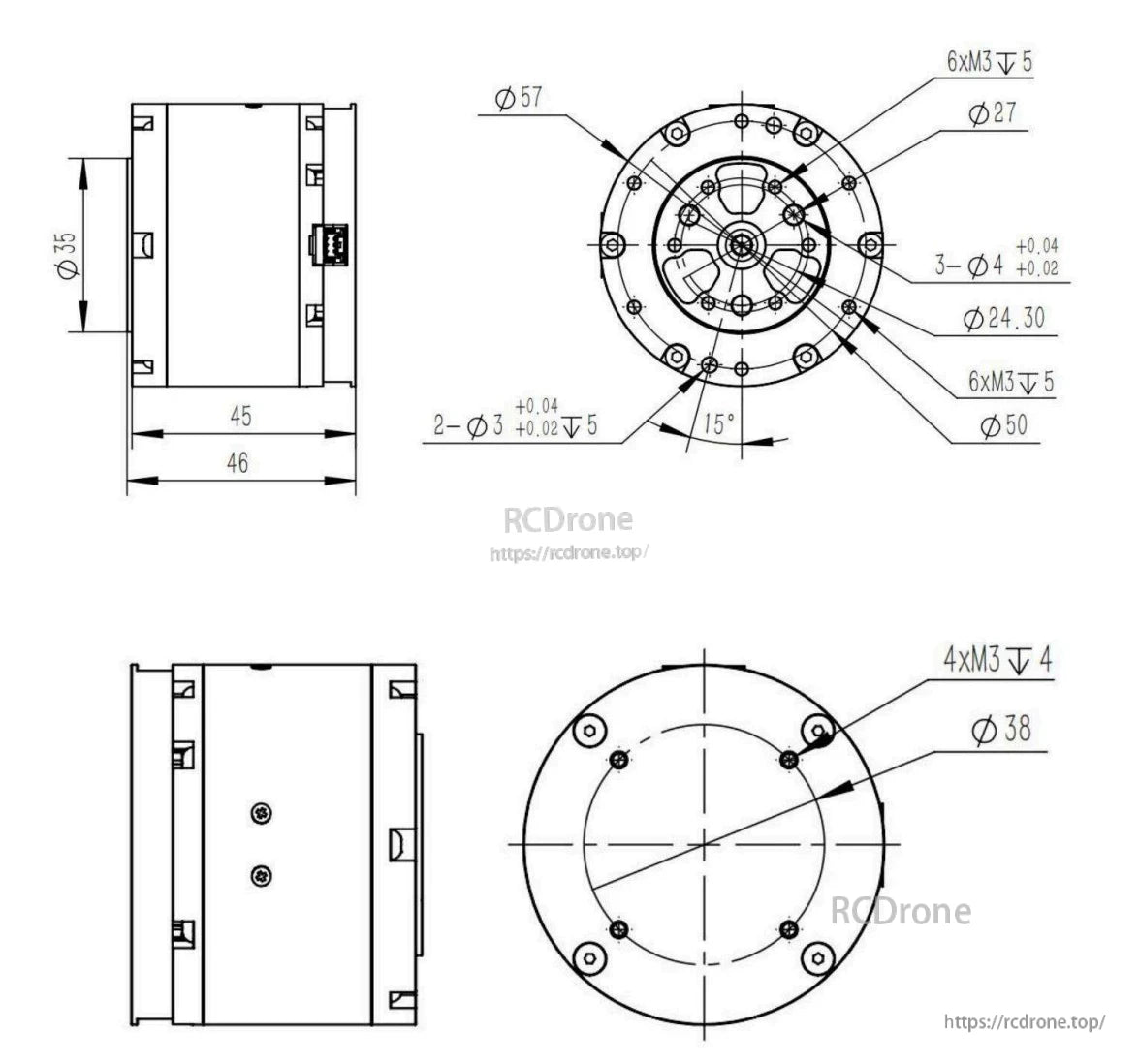
DAMIAO DM-J4310-2EC Roboter-Motor-Spezifikationen, Abmessungen und mechanische Zeichnungen sind enthalten.
Related Collections




