




DFRobot SEN0142 MPU6050 6-DOF Gyroskop-Beschleunigungsmesser IMU Modul mit I2C Digital Motion Processor für Arduino & Robotik
DFRobot SEN0142 MPU6050 6-DOF Gyroskop-Beschleunigungsmesser IMU Modul mit I2C Digital Motion Processor für Arduino & Robotik
DFRobot
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
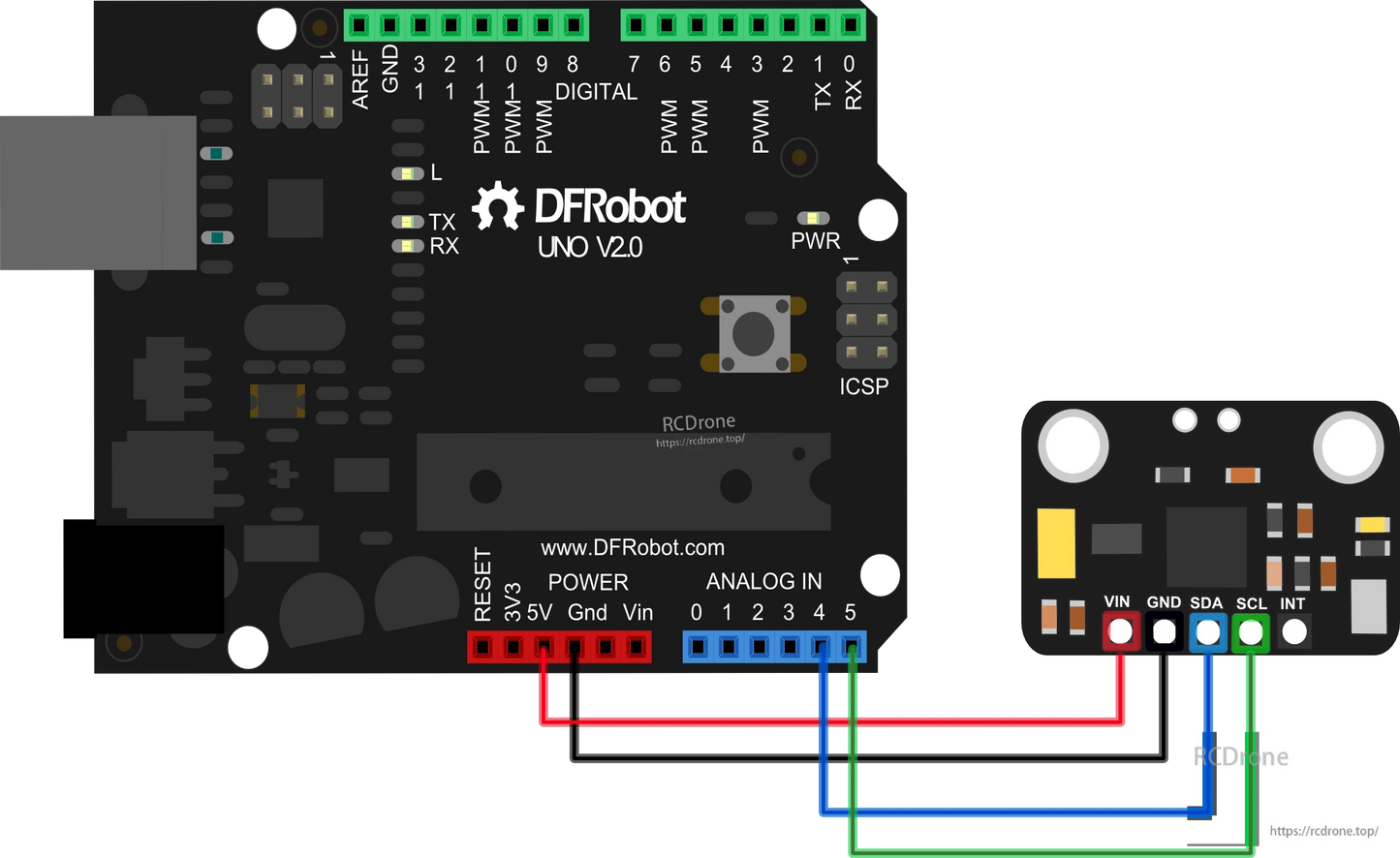
Das DFRobot SEN0142 MPU6050 6 DOF IMU-Modul integriert ein 3-Achsen-Gyroskop und 3-Achsen-Beschleunigungsmesser auf einem einzigen Chip und bietet präzise Bewegungserkennung für Robotik, Drohnen, tragbare Geräte und Arduino-Projekte. Mit einem Digital Motion Processor (DMP) unterstützt es fortschrittliche 6-Achsen- und 9-Achsen MotionFusion-Algorithmen, die Quaternionen, Euler-Winkel und Rohsensordaten ausgeben. Mit einem breiten Eingangsspannungsbereich von 3V–5V kann das MPU6050 direkt an Arduino und andere Mikrocontroller angeschlossen werden, um Echtzeit-Bewegungsverfolgung und Gestenerkennung zu ermöglichen.
Hauptmerkmale
-
Kombiniert 3-Achsen-Gyroskop und 3-Achsen-Beschleunigungsmesser in einem Chip
-
Programmierbarer Beschleunigungsmesserbereich: ±2g, ±4g, ±8g, ±16g
-
Gyroskopsensitivität: ±250, ±500, ±1000, ±2000 dps
-
Digitaler Bewegungsprozessor (DMP) für Onboard MotionFusion und Gestenerkennung
-
I2C-Digitalinterface unterstützt Matrix-, Quaternion-, Euler- und Rohdatenformate
-
Integrierte Bias &und Kompasskalibrierung für verbesserte Genauigkeit
-
Kompatibel mit Arduino und tragbaren Elektronikgeräten über I2Cdevlib
Technische Daten
-
Arbeitsspannung: 3–5 V
Ausgabe: I2C digital (6/9-Achsen MotionFusion-Daten)
-
Beschleunigungsmesser: ±2g / ±4g / ±8g / ±16g programmierbarer Bereich
-
Gyroskop: ±250 / ±500 / ±1000 / ±2000 dps Empfindlichkeit
-
Datenformat: Rotationsmatrix, Quaternion, Euler-Winkel, Rohdaten
-
Abmessungen: 14 × 21 mm
Anwendungen
-
Robotik-Bewegungserkennung
-
Arduino &und DIY-Elektronikprojekte
-
Mensch-Computer-Interaktion (HCI)
-
Tragbare Geräte und Gestensteuerung
-
Navigations- und Gleichgewichtssysteme (e.g., Segway-ähnliche Transporter)
-
Drohnenstabilisierung und Bewegungsverfolgung
Details



Beispielcode
Bitte laden Sie zuerst die Bibliotheken für alle IMU-Sensoren herunter!




- Wenn du dich für eine Auswahl entscheidest, wird die Seite komplett aktualisiert.
- Wird in einem neuen Fenster geöffnet.