F450-4B Raspberry Pi Programmierbares Drohnen-Entwicklungskit – Pixhawk DIY Ardupilot Industrielle Open-Source-Drohnenplattformen
F450-4B Raspberry Pi Programmierbares Drohnen-Entwicklungskit – Pixhawk DIY Ardupilot Industrielle Open-Source-Drohnenplattformen
RCDrone
Verfügbarkeit für Abholungen konnte nicht geladen werden
Überblick
Der F450-4B Raspberry Pi-Drohne ist ein fortgeschrittenes DIY Drohnenbausatz das eine leistungsstarke Himbeer-Pi 4B Bordcomputer mit dem vielseitigen Pixhawk 2.4.8 Flugsteuerung, was es zu einem hochgradig anpassbaren und programmierbare Drohne Plattform. Diese Open-Source-Drohnenplattform unterstützt modernste Tools wie Dronekit-Python, sodass Entwickler autonome Missionen, Echtzeit-Datenübertragung und KI-gestützte Bildverarbeitungsanwendungen erstellen können. Mit einem robusten 450-mm-Rahmen, einer 200-MP-HD-Kamera, einem 3S-5200-mAh-Akku für bis zu 20 Minuten Flugzeit und erweiterten Flugmodi wie Höhenhaltung, Rückkehr zum Ausgangspunkt und Kreismodus ist das F450 Drone Kit die ideale Wahl für Enthusiasten, Forscher und Pädagogen, die eine innovative Drohnenentwicklungserfahrung suchen.
Hauptmerkmale
Leistungsstarke Hardware
- Himbeer-Pi 4B: Angetrieben von einem 64-Bit-Quad-Core-Prozessor mit 1,5 GHz, der 4K-Videoausgabe und Hochgeschwindigkeits-WLAN-Kommunikation für zuverlässigen Betrieb unterstützt.
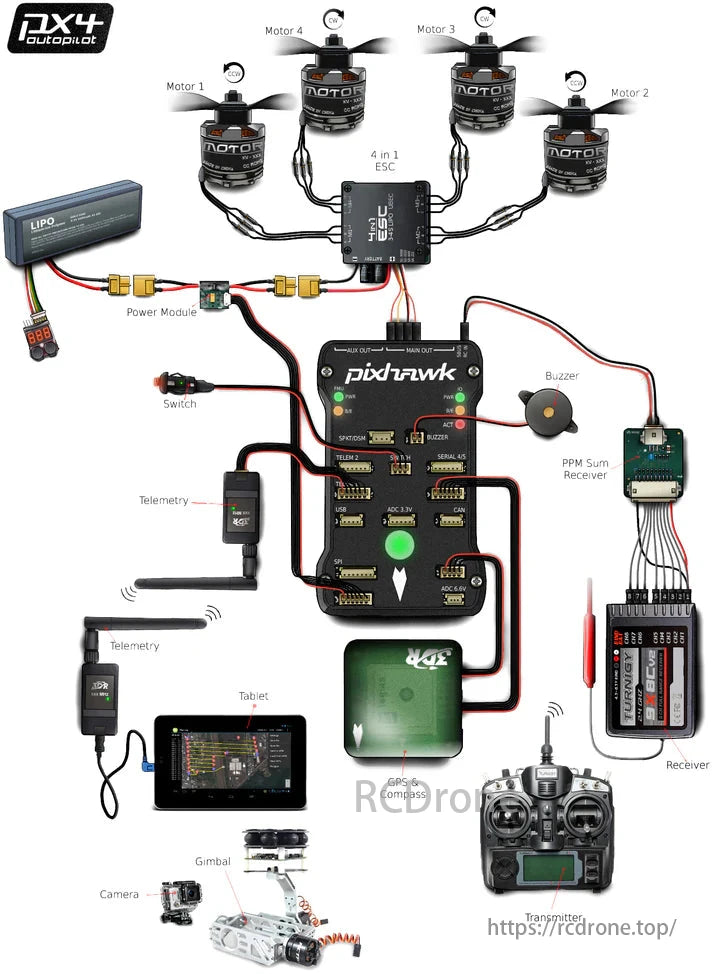
- Pixhawk 2.4.8 Flugsteuerung: Ausgestattet mit mehreren integrierten Sensoren, die eine präzise Lageregelung, Schwebeflug und Missionsplanung gewährleisten.
- Unterstützung der Vision-Erweiterung: Gepaart mit einer Monokularkamera und OpenCV-Tools erfüllt dieses Kit die Anforderungen an die Echtzeit-Bildübertragung und -verarbeitung.
Verschiedene Flugmodi
- Höhe halten (AltHold): Behält eine stabile Flughöhe bei.
- Schweben: Ermöglicht präzises Schweben im stationären Zustand.
- Zurück zur Startseite (Zurück): Kehrt bei Signalverlust oder schwacher Batterie automatisch zum Ausgangspunkt zurück.
- Landung (Land): Führt eine sanfte autonome Landung aus.
- Stabilisierungsmodus: Passt die Fluglage automatisch an.
- Kreismodus: Führt Kreisflüge um ein Ziel aus.
- Headless-Modus: Entfernt Richtungsbeschränkungen für eine einfachere Steuerung.
- Außer Kontrolle geratene Rückkehr: Kehrt zu einer voreingestellten Position zurück, wenn das Signal verloren geht.
- Landung mit geringer Leistung: Sichere Landung bei niedrigem Batteriestand.
Datenübertragung und Bildverarbeitung
- Richtet über einen integrierten Hotspot ohne externe Router ein lokales WLAN-Netzwerk ein und ermöglicht so die Daten- und Bildübertragung in Echtzeit.
- Unterstützt OpenCV-basiertes Video-Streaming und -Analyse, ideal für Bildüberwachung und intelligente Anwendungen.
Technische Daten
Drohnenparameter
| Parameter | Details |
|---|---|
| Name | F450 Drohnen-Kit |
| Radstand | 450 mm |
| Gewicht | 1493g (mit Akku und Raspberry Pi 4B) |
| Fluglotse | Pixhawk 2.4.8 Open-Source-Flugcontroller |
| Bordcomputer | Himbeer-Pi 4B |
| Kamera | 200 MP HD 1080P |
| Schwebeunterstützung | Optisches Flussmodul und Laser-Distanzsensor |
| GPS-Modul | m8n GPS |
| Flugdauer | ~20 Minuten (je nach Umgebung und Mission) |
| Batterie | 3S 5200 mAh (11,1 V) |
| Nutzlastkapazität | 500g |
| Windbeständigkeit | Stufe 3-4 |
| Motor | SunnySky A2212 |
| ESC | Hobbywing 20A ESC (unterstützt 3S-4S LiPo-Akkus) |
| Propeller | T1045 selbstsperrende Propeller |
| Max. Höhe | 2000m (störungsfrei) |
| Flugreichweite | 1000 m |
| Flugszenarien | Innen / Außen |
Pixhawk 2.4.8 Flugcontroller-Spezifikationen
- Prozessor: 32-Bit ARM STM32F427 Cortex M4, 168 MHz, 256 KB RAM
- Sensoren:
- L3GD20 3-Achsen-Gyroskop mit 6 Freiheitsgraden
- LSM303D 3-Achsen 14-Bit Beschleunigungsmesser/Magnetometer
- MPU6000 6-Achsen-Beschleunigungsmesser/Magnetometer
- MS5611 Hochpräzisionsbarometer
- Ground Control-Kompatibilität: QGroundControl, Missionsplaner
- Maße: 81 mm x 47 mm x 16 mm; Gewicht: 37 g
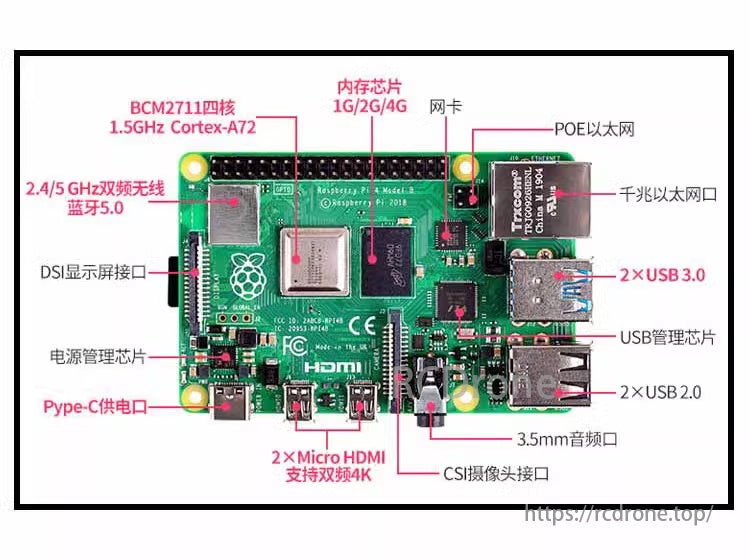
Raspberry Pi 4B Spezifikationen
- Chipsatz: Broadcom BCM2711
- CPU: 64-Bit 1,5 GHz Quad-Core
- Grafikkarte: 500 MHz VideoCore VI
- RAM: 4 GB DDR4
- Schnittstellen: 2 x USB 3.0, 2 x USB 2.0
- Videoausgang: Zwei Micro-HDMI-Anschlüsse, unterstützt 4K@60Hz
- Kommunikation: Bluetooth 5.0, WiFi 5 (2,4/5 GHz)
- Stromversorgung: USB Typ C (5 V, 3 A)
Paket beinhaltet
Konfiguration 1: SunnySky A2212 Motor mit FlySky i6 Fernbedienung und Telemetrie
- F450 Rahmen mit Fahrwerk
- SunnySky A2212 Motoren (4 Stück)
- Hobbywing 20A ESCs (4 Stück)
- T1045 selbstsperrende Propeller (4 Paare)
- PIX M8n GPS-Modul
- Schwingungsdämpfende Platte
- FlySky i6 Fernbedienung
- 3S 5200mAh Akku
- B3 Balance Ladegerät
- GPS-Halterung
- FS Spannungstelemetriemodul

Enthalten: Batteriebänder, Nylon-Kabelbinder, Holzunterlagen, 3M-Klebeband, Summer, Installationswerkzeuge
Videos zur Montage und Fehlerbehebung sowie zugehörige Materialien werden bereitgestellt. Wenden Sie sich für den Quellcode an den Kundendienst.
Konfiguration 2: SunnySky A2212 Motor mit Radiolink PRO
- F450 Rahmen mit Fahrwerk
- SunnySky A2212 Motoren (4 Stück)
- Hobbywing 20A ESCs (4 Stück)
- 9450 selbstsperrende Propeller (3 Paar)
- Bilder.M8n GPS-Modul-Kit
- Schwingungsdämpfende Platte
- Radiolink PRO (R9DS-Empfänger)
- 3S 2200mAh Steuerbatterie
- 3S 5200mAh Akku
- B3 Balance Ladegerät
- GPS-Halterung

Enthalten: Batteriebänder, Nylon-Kabelbinder, Holzunterlagen, 3M-Klebeband, Summer, Installationswerkzeuge
Videos zur Montage und Fehlerbehebung sowie zugehörige Materialien werden bereitgestellt. Wenden Sie sich für den Quellcode an den Kundendienst.
Montage des F450-Drohnenbausatzes
Anwendungsszenarien
Das Drohnen-Entwicklungskit F450-4B ist ideal für:
- Drohnen-F&E: Universitäre Forschung, Flugreglertests, Algorithmenentwicklung.
- Intelligente Anwendungen: Pfadplanung, Zielerkennung und Hindernisvermeidung.
- Pädagogische Experimente: Programmierung, Hardwaremontage und Debugging.
- Einsatz im Feld: Schweben in Innenräumen, Vermessung im Außenbereich, landwirtschaftliche Überwachung und mehr.
Details
F450-4B Raspberry Pi Drohnen-Entwicklungsplattform
Die F450 ist ein klassisches und weit verbreitetes Drohnenmodell, das eine einfache und bequeme Montage, ein gutes Preis-Leistungs-Verhältnis und hohe Zweckmäßigkeit bietet und für Anfänger geeignet ist, die schnell mit dem Drohnenbetrieb beginnen möchten.

Verbesserter Raspberry Pi 4B
Die Hardware-Verarbeitungsleistung des Raspberry Pi 4B ist deutlich stärker als die des 3B+.
Der Raspberry Pi ist mit dem neuesten Open-Source-System ausgestattet Ubuntu 20.04und bietet im Vergleich zum Ubuntu Mate-System ein reibungsloseres Erlebnis.

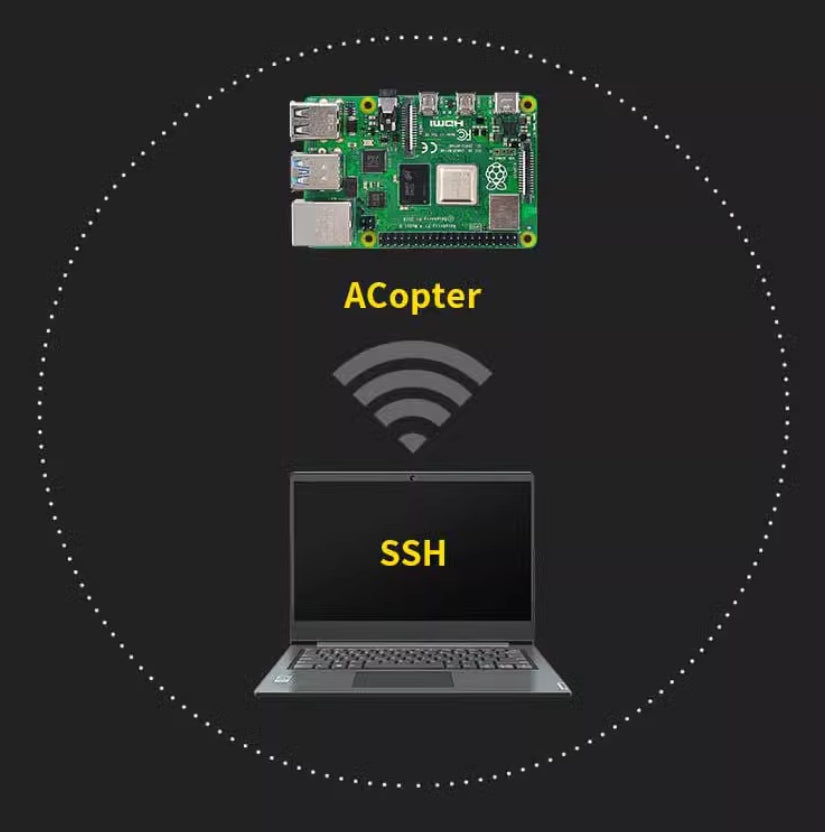
Systemfähiger WLAN-Hotspot (Acopter)
Mithilfe der WLAN-Funktion des Raspberry Pi 4B wird ein selbstgebauter Hotspot (Acopter) erstellt. Der PC kann sich direkt mit dem WLAN-Hotspot des 4B verbinden, um ein lokales Netzwerk zu bilden und SSH-Befehle für den Fernzugriff auf den Raspberry Pi zu verwenden. Im Gegensatz zum Modell 3B+, das für die Netzwerkkonfiguration einen Router benötigt, ist diese Einrichtung viel einfacher und benutzerfreundlicher für Anfänger.
Visuelle OpenCV-Verarbeitung
Eine Monokularkamera wird hinzugefügt, die die Bildübertragung und Nachbearbeitung ermöglicht. Videostreams können über den Raspberry Pi aufgenommen und mit Tools wie OpenCV verarbeitet werden. Echtzeit-HD-Videostreams können auch zur Verarbeitung an einen PC oder zur Anzeige an ein mobiles Gerät zurückgesendet werden.

Weitere Erweiterungsschnittstelle
Der Raspberry Pi 4B bietet eine große Auswahl an Erweiterungsschnittstellen, darunter zwei USB 3.0-Anschlüsse, zwei 4K-Micro-HDMI-Anschlüsse, CSI- und DSI-Schnittstellen, Gigabit-Ethernet und eine Typ-C-Stromversorgung, und bietet so außergewöhnliche Vielseitigkeit für verschiedene Anwendungen.
Einzelkamera-Edition
Die Single-Camera-Edition umfasst einen Raspberry Pi 4B und eine Monokularkamera, die die Kommunikation über einen seriellen Port mit dem Flugcontroller ermöglicht. Sie unterstützt Aufgaben wie Bildverarbeitung, Python-Programmierung und Kommunikation. Diese Version ist für Benutzer mit Vorkenntnissen im Umgang mit Pixhawk, Grundkenntnissen in Ubuntu (Linux), OpenCV, Raspberry Pi und lokaler Netzwerkkommunikation geeignet.
Zusätzlich zu den Basisfunktionen unterstützt die Single Camera Edition die Bild- und Datenübertragung über WLAN und ermöglicht die Steuerung der Drohne über Dronekit-Python Programmierung.

Optische Flusspositionierung
Schwebeflugsteuerung in Innenräumen mit Dronekit-Python unter optischen Flusspositionierungsbedingungen

Diese Drohnen-Entwicklungsplattform unterstützt ROS, Python-Programmierung, OpenCV-Bilderkennung, 4G-Fernübertragung, Und Visuell geführte Landung mit Aruco 2D-Code, was es äußerst vielseitig und innovativ macht.

FlySky i6 Fernbedienung
Ausgestattet mit einem IA6B-Empfänger mit vorinstallierter 10-Kanal-Firmware, Spannungstelemetriemodul und einer Fernbedienungsreichweite von über 1000 m, ideal für Anfänger zum Lernen und Üben.

Radiolink AT9S-Fernbedienung
Verfügt über 10 Kanäle mit einer Steuerreichweite von über 2000 m. Ausgestattet mit einem Telemetriemodul, das Daten zu Batteriespannung, GPS-Satellitenzahl, Flughöhe, Koordinaten, Flugmodus und mehr liefert.

Häufig gestellte Fragen
1. Kann ich Sekundärentwicklung durchführen? Kann ich selbständig programmieren?
Die Antwort ist ja. Wie bereits erwähnt, ist Ardupilot derzeit das am weitesten verbreitete Open-Source-Flugsteuerungssystem, und viele hervorragende nationale und internationale Drohnenmodelle werden auf Basis dieses Systems entwickelt.
Die Sekundärentwicklung hat hauptsächlich zwei Richtungen: Entwicklung der Flugsteuerung und externe Erweiterung.
- Flugsteuerungsentwicklung
Wir verwenden Ardupilot. Daher beinhaltet das Erlernen der Open-Source-Entwicklung von Flugsteuerungen in erster Linie das Studium des Open-Source-Projekts Ardupilot.
- Erforderlich sind gute Programmierkenntnisse (der Quellcode ist in C++) sowie Kenntnisse in höherer Mathematik (diskrete Mathematik, Iteration, Linearisierung), Kalman-Filterung und Embedded-Entwicklung.
- Eine solide theoretische Grundlage ist erforderlich. Dies bereitet Sie auf die Arbeit an der Entwicklung unbemannter Systeme und der Forschung und Entwicklung von Flugsteuerungen vor.
Wenn Sie sich auf die Entwicklung von Flugsteuerungen konzentrieren möchten, muss die meiste Arbeit auf Ihrem Computer erledigt werden:
- Einrichten der Programmierumgebung, Herunterladen des Quellcodes der Flugsteuerung, Studieren seiner Architektur und Funktionsmodule usw.
- Sobald Sie mit dem Code-Framework vertraut sind, können Sie mit der Programmierung auf Basis des vorhandenen Codes beginnen.
Beginnen Sie mit einem einfachen Flugsteuerungsmodell und orientieren Sie sich an unserem Lehrbuch zur Ardupilot-Flugsteuerung.
- Externe Expansionsentwicklung
Die externe Erweiterung ermöglicht es Ihnen, über die reservierten Schnittstellen des Flugcontrollers externe Geräte basierend auf Ihren Aufgaben und Szenarien hinzuzufügen. Zum Beispiel:
- Fügen Sie ein optisches Flussmodul für die Positionierung und das Schweben in Innenräumen hinzu.
- Fügen Sie ein Laserradar zur Hindernisvermeidung hinzu.
- Nutzen Sie Telemetrie, um eine autonome Flug- und Routenplanung zu ermöglichen.
- Installieren Sie einen Bordcomputer (z. B. Raspberry Pi) und verwenden Sie Dronekit-Python oder ROS zum Programmieren zur Steuerung der Drohne.
Das Ziel der Hinzufügung eines Bordcomputers besteht in der Bewältigung komplexerer Aufgaben, wie zum Beispiel:
- Verwenden der Raspberry Pi-Kamera zur visuellen Erkennung (erfordert OpenCV, YOLO usw.).
- Kombination von Kommunikationsprotokollen zur Steuerung des Drohnenflugs.
- Übertragung von Flugdaten oder hochauflösenden Videos über Netzwerke.
Diese Funktionen können nicht allein durch den Flugregler erreicht werden.
Der Schwerpunkt der Ausbildung im Bereich externe Expansion liegt auf der Bewerbung, was auch die Ausrichtung der meisten bundesweiten Wettbewerbe ist.Nach dem Lernen können Sie kritische Bereiche intelligenter Drohnen erkunden, wie etwa visuelle Erkennung, KI-Integration mit Drohnen und mehr.
2. Welche Voraussetzungen müssen für eine eigenständige Entwicklung gegeben sein?
Das Erlernen von Drohnen ist ein schrittweiser Prozess. Drohnensysteme sind interdisziplinär und integrativ und umfassen ein breites Spektrum an Wissensbereichen. Um die Drohnenentwicklung zu erlernen, sind die folgenden Grundlagen erforderlich:
- Grundlegende praktische Fähigkeiten, einschließlich der Erfahrung im Umgang mit Lötkolben, verschiedenen Schraubendrehern und anderen Werkzeugen.
- Grundkenntnisse der Elektronik: Begriffe wie Spannung, Strom, Leistung, Polarität und Signale.
- Grundlegende Kenntnisse der Automatisierungssteuerung: PID-Regelung, Feedback, digitale Signale, analoge Signale usw.
- Grundlegende Computerkenntnisse: Treiber, serielle Schnittstellen, Baudraten, Firmware-Versionen, Software-Versionen.
- Grundkenntnisse zu Pixhawk-Drohnen.
- Grundkenntnisse des Ubuntu-Betriebssystems.
- Kenntnisse in Programmiersprachen: beispielsweise C++ und Python.
Wie erstelle ich eine Raspberry PI-Drohne?
Related Collections