






Feetech SCS20 – 6 V, 20 kg, cm, 360-Grad-Magnetcode, serielle Steuerung, TTL-Servo, 20 kg, SCS-Servo, Bus-Paketkommunikation
Feetech SCS20 – 6 V, 20 kg, cm, 360-Grad-Magnetcode, serielle Steuerung, TTL-Servo, 20 kg, SCS-Servo, Bus-Paketkommunikation
Feetech
Verfügbarkeit für Abholungen konnte nicht geladen werden
SPEZIFIKATIONEN
Markenname: Feetech
Herkunft: Festlandchina
Material: Kunststoff
Kunststofftyp: PC
RC-Teile und Zubehör: Batterien – LiPo
Größe: 10*10*10
Für Fahrzeugtyp: Autos
Verwendung: Fahrzeuge und ferngesteuertes Spielzeug
Teile/Zubehör aufrüsten: Lithiumbatterie
Fernbedienungsperipheriegeräte/-geräte: Fernbedienung
Werkzeugzubehör: Batterie
Menge: 1 Stück
Technische Parameter: KV1100
Modellnummer: SCS20-360T
Allradantriebsattribute: Motoren
Radstand: Schrauben
Modellnummer: STS3020
Größe: 40 x 20 x 40,5 mm
Gewicht: 62g
Getriebetyp: Kupfer und Aluminium
Grenzwinkel: KEIN Grenzwert
Lager: 2 Kugellager
Hornzahnradverzahnung: 25T (4,96 mm)
Motor: Metallbürstenmotor
Betriebsspannungsbereich: 6–7,4 V
Spitzenstalldrehmoment: 20kg.cm@6V
Nenndrehmoment: 6,6kg.cm@6V
Protokolltyp: Halbduplex-asynchrone serielle Kommunikation
Gehäuse: Aluminium und Kunststoff
|
1.Umweltbedingung anwenden 4-1 Leerlaufstrom (im Stillstand) 10 mA 10 mA
Funktion der elektronischen Steuerung:
1.Beschleunigungs-Start-Stopp-Funktion: Geschwindigkeit und Beschleunigungswert können eingestellt werden, der Bewegungseffekt ist sanfter. 2.Hohe Präzision, 360-Grad-Absolutposition 4096-Bit-Präzision, die höchste Positionsauflösung beträgt 0,088 Grad, wenn die Steuerung 90 Grad beträgt, geben Sie 4096/360 * 90 = 1024 ein, wenn die Steuerung 180 Grad beträgt, Geben Sie 4096 / 360 * 180 = 2048 ein, um zu berechnen. 3. Es gibt vier Arbeitsmodusumschaltungen (Modus 0-Positionsservo, Modus 1 Geschwindigkeit geschlossener Regelkreis, Modus 2 Geschwindigkeit offener Regelkreis, Modus 3 Schrittservo). 1)、Modus 0:Standortmodus, der Standardmodus. In diesem Modus kann eine 360-Grad-Absolutwinkelsteuerung realisiert werden. Unterstützt Beschleunigungsbewegungen. 2)、Modus 1: Geschwindigkeitsregelung, in der Programmierschnittstelle ist der Betriebsmodus auf 1 eingestellt, wechseln Sie in den Geschwindigkeitsregelungsmodus und geben Sie die entsprechende Geschwindigkeit in die Geschwindigkeitsspalte ein, um zu laufen . 3)、Modus 2: Geschwindigkeits-Open-Loop, in der Programmierschnittstelle ist der Betriebsmodus auf 2 eingestellt, wechseln Sie in den Geschwindigkeits-Open-Loop-Modus und geben Sie die entsprechende Zeit in die Zeitspalte ein, um zu laufen. 4)、Modus3:Schrittmodus: In der Programmierschnittstelle ist die maximale/minimale Winkelgrenze auf 0 und der Betriebsmodus auf 3 eingestellt. Wechseln Sie in den Schrittmodus. Geben Sie die Position in der Positionsleiste ein, um zur Zielposition zu gelangen. Klicken Sie erneut auf die Position, um weiter in die gleiche Richtung zu gehen. 4、Multi-Turn-Modus, 360-Grad-Absolutsteuerung und Rückmeldung, bei höchster Genauigkeit kann die absolute Positionssteuerung plus oder minus 7 Umdrehungen betragen, aber Die Anzahl der Einschaltzyklen wird nicht gespeichert, nur der absolute Positions-Feedbackwert bleibt erhalten. 5、Ein-Tasten-Kalibrierung, 360-Grad-Winkelinstallation an jeder Position, (40 (dezimal) Adresseingabe 128 (dezimal)) Eine wichtige Korrektur der aktuellen Position ist die Mitte (2048 (dezimal)). 6、TTL-Kommunikationsebene, asynchrone Halbduplex-Kommunikation, Busprotokollunterstützung zum Anpassen von Lese- und Schreibparametern und Hinzufügen einer synchronen Lesefunktion (Senden einer Anweisung, die Rückleseanweisung nacheinander von jedem Servo auf dem Bus zu empfangen.) 7、Mehrere Schutzfunktionen (Überlast, Überstrom, Überspannung, Überhitzung, Schaltereinstellung, Änderung von Zustandsparametern) 1) 、 Überlastschutz: Durch Positionserkennung hält die Entladekraft während der Bewegung von der Startposition zur Zielposition 2 Sekunden lang an (20 %), wenn erkannt wird, dass die aktuelle Position nicht die Zielposition ist, nachdem sie auf das Blockieren von Hindernissen gestoßen ist. der standardmäßigen Blockierkraft). Bis ein neuer Befehl ausgelöst wird, Schutz freigeben 2)、Überstromschutz: Überprüfen Sie anhand des eingestellten Stromwerts, ob der Strom den eingestellten Stromwert erreicht. Wenn der eingestellte Stromwert erreicht ist, lassen Sie die Kraft los (das Standarddrehmoment ist 0). Bis ein neuer Befehl ausgelöst wird, Schutz freigeben 3)、Überspannungsschutz: Ermitteln Sie den aktuellen Spannungswert. Wenn der eingestellte Spannungswert überschritten wird, zeigt der Alarm eine Überspannung an. 4)、Überhitzungsschutz: Erkennt die aktuelle Motortemperatur. Wenn die Temperatur den eingestellten Wert überschreitet, zeigt der Alarm eine Überhitzung an. 8:Mehrfachrückmeldung: 1)Lastrückmeldung: Der Stromsteuerausgang steuert den Spannungstastverhältnis des Motors und Der volle Maßstab beträgt 1000 = 100 % Drehmomentausgang. 2) Stromrückmeldung: Der Servo-Arbeitsstrom, 1 = 6,5 mA 3) Spannungsrückmeldung: Die Servo-Arbeitsspannung, 70 = 7 V, 0,1 V 4) Temperaturrückmeldung: interne Arbeitstemperatur des aktuellen Servos (Messung der Temperatur)。 5) Geschwindigkeitsrückmeldung: Rückmeldung der Geschwindigkeit der aktuellen Motordrehung und der Anzahl der Schritte in Zeiteinheiten (pro Sekunde) 9、PID-Parameter öffnen. |




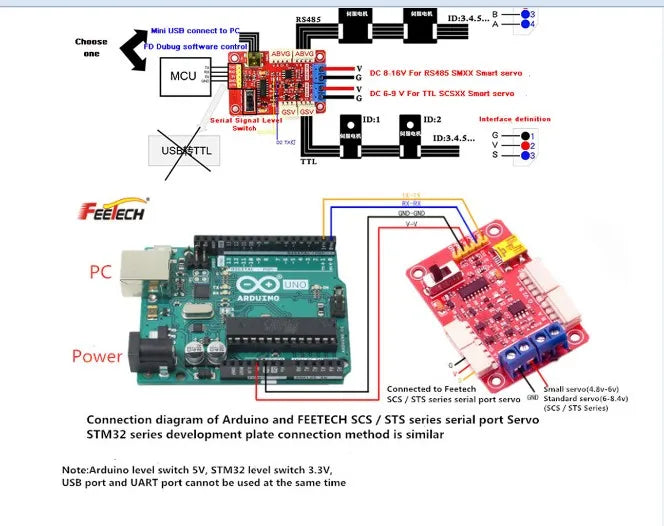
>hmni USB unmChu Chontc Dubuq ior contfo A8-zi DC R I6y Fr RSRS Shr Smuc] >hrtu MCU DC EBYFor ECsX Smor keno 5eal 6i00.
Related Collections






