ST-3046-C001 ist ein 6-V-40-kg-Seriellbus-Smart-Servo mit Gehäuse aus Vollaluminiumlegierung, kernlosem Motor, Stahlgetriebe und kernlosem Motor. Feetech hat die TTL-Steuerplatine selbst erforscht und entwickelt. 12 Bit-Sensor mit hochpräziser magnetischer Codierung. Das Stillstandsdrehmoment beträgt 40 kg cm, es können Positions-, Geschwindigkeits-, Spannungs-, Strom-, Temperatur- und Lastparameter zurückgemeldet werden. Somit kann ein Überlast- und Überstromschutz realisiert werden. Es eignet sich für den Einsatz in Industrieanlagen, Robotern und Getriebeanwendungsszenarien.
SKU:STS3046
Produktname:7,4V 40KG.CM Kunststoffgehäuse, Metallgetriebe, magnetischer Encoder, Einzelwellen-TTL-Seriell-Bus-Servo
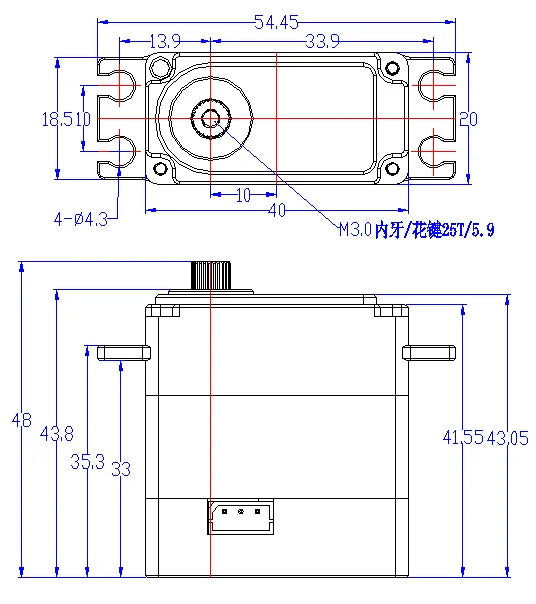
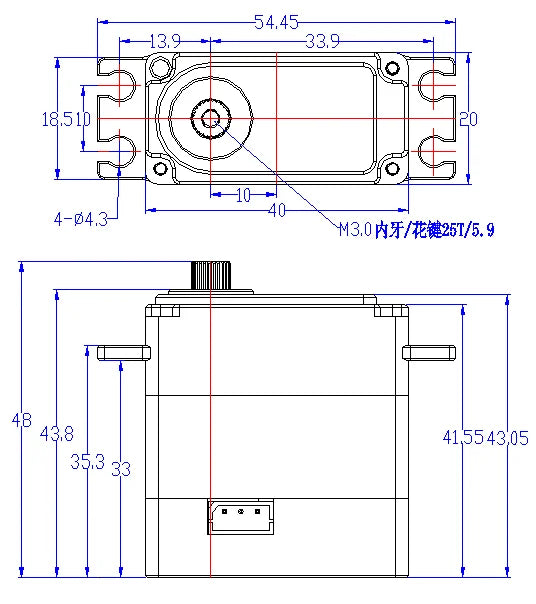
Erscheinungsgröße: 45,2X24,7X35mm (siehe Bauplan)
Stillstandsdrehmoment:[email protected]
Stillstandsgeschwindigkeit:[email protected]
Rückmeldung: Last/Position/Geschwindigkeit/Spannung/Strom/Temperatur
Elektronischer Schutz: Überhitzung/Überstrom/Überspannung/Überlastschutz




Strukturelle Merkmale:
Das Gehäuse besteht aus einem technischen Kunststoffgehäuse mit höherer Festigkeit. Optimieren Sie den Achsabstand. Kompaktere Gesamtstruktur. Das Servogetriebe verfügt über eine 1:345-Kupfergetriebekombination. Höheres Drehmoment. Bei gleichem Drehmoment , Im Vergleich zur Standard-Servogröße sieht es niedriger aus (5 mm). Anwendung in vierbeinigen Robotern, Schlangenrobotern, Desktop-Robotern, humanoiden Robotern und mechanischen Armen.
Funktion der elektronischen Steuerung:
1.Beschleunigungs-Start-Stopp-Funktion: Geschwindigkeit und Beschleunigungswert können eingestellt werden, der Bewegungseffekt ist sanfter.
2.Hohe Präzision, 360-Grad-Absolutposition, 4096-Bit-Präzision, die höchste Positionsauflösung beträgt 0,088 Grad. Wenn die Steuerung 90 Grad beträgt, geben Sie 4096/360 * 90 = 1024 ein. Wenn die Steuerung 180 Grad beträgt, geben Sie 4096/360 * 180 = 2048 ein , um zu berechnen.
3.Es gibt vier Arbeitsmodusumschaltungen (Modus 0-Positionsservo, Modus 1 Geschwindigkeit geschlossener Regelkreis, Modus 2 Geschwindigkeit offener Regelkreis, Modus 3 Schrittservo).
1)、Modus 0:Standortmodus, der Standardmodus. In diesem Modus kann eine 360-Grad-Absolutwinkelsteuerung realisiert werden. Unterstützung der Beschleunigungsbewegung.
2)、Modus 1: Geschwindigkeitsregelung, in der Programmierschnittstelle ist der Betriebsmodus auf 1 eingestellt, wechseln Sie in den Geschwindigkeitsregelungsmodus und geben Sie die entsprechende Geschwindigkeit in die Geschwindigkeitsspalte ein, um zu laufen .
3)、Modus 2: Geschwindigkeits-Open-Loop, in der Programmierschnittstelle ist der Betriebsmodus auf 2 eingestellt, wechseln Sie in den Geschwindigkeits-Open-Loop-Modus und geben Sie die entsprechende Zeit in die Zeitspalte ein, um zu laufen.
4)、Modus3:Schrittmodus: In der Programmierschnittstelle ist die maximale/minimale Winkelgrenze auf 0 und der Betriebsmodus auf 3 eingestellt. Wechseln Sie in den Schrittmodus. Geben Sie die Position in der Positionsleiste ein, um zur Zielposition zu gelangen. Klicken Sie erneut auf die Position, um weiter in die gleiche Richtung zu gehen.
4、Multi-Turn-Modus, 360-Grad-Absolutsteuerung und Rückmeldung, bei höchster Genauigkeit kann die absolute Positionssteuerung plus oder minus 7 Umdrehungen betragen, aber Die Anzahl der Ein-/Ausschaltzyklen wird nicht gespeichert, nur der absolute Positionsrückwert wird beibehalten.
5、Ein-Tasten-Kalibrierung, 360-Grad-Winkelinstallation an jeder Position, (40 (dezimal) Adresseingabe 128 (dezimal)) Eine wichtige Korrektur der aktuellen Position ist die Mitte (2048 (dezimal)).
6、TTL-Kommunikationsebene, asynchrone Halbduplex-Kommunikation, Busprotokollunterstützung zum Anpassen von Lese- und Schreibparametern und Hinzufügen einer synchronen Lesefunktion (Senden einer Anweisung, die Rückleseanweisung nacheinander von jedem Servo auf dem Bus zu empfangen.)
7、Mehrere Schutzfunktionen (Überlast, Überstrom, Überspannung, Überhitzung, Schaltereinstellung, Änderung von Zustandsparametern)
1) 、 Überlastschutz: Durch Positionserkennung hält die Entladekraft während der Bewegung von der Startposition zur Zielposition 2 Sekunden lang an (20 %), wenn erkannt wird, dass die aktuelle Position nicht die Zielposition ist, nachdem sie auf das Blockieren von Hindernissen gestoßen ist. der standardmäßigen Blockierkraft). Bis ein neuer Befehl ausgelöst wird, Schutz freigeben
2)、Überstromschutz: Überprüfen Sie anhand des eingestellten Stromwerts, ob der Strom den eingestellten Stromwert erreicht. Wenn der eingestellte Stromwert erreicht ist, lassen Sie die Kraft los (das Standarddrehmoment ist 0). Bis ein neuer Befehl ausgelöst wird, Schutz freigeben
3)、Überspannungsschutz: Ermitteln Sie den aktuellen Spannungswert. Wenn der eingestellte Spannungswert überschritten wird, zeigt der Alarm eine Überspannung an.
4)、Überhitzungsschutz: Erkennt die aktuelle Motortemperatur. Wenn die Temperatur den eingestellten Wert überschreitet, zeigt der Alarm eine Überhitzung an.
8:Mehrfachrückmeldung:
1)Lastrückmeldung: Der Stromsteuerausgang steuert den Spannungstastverhältnis des Motors und Der volle Maßstab beträgt 1000 = 100 % Drehmomentausgang.
2) Stromrückmeldung: Der Servo-Arbeitsstrom, 1 = 6,5 mA
3) Spannungsrückmeldung: Die Servo-Arbeitsspannung, 70=7 V, 0,1 V
4) Temperaturrückmeldung: interne Arbeitstemperatur des aktuellen Servos (Messung der Temperatur)。
5) Geschwindigkeitsrückmeldung: Rückmeldung der Geschwindigkeit der aktuellen Motordrehung und der Anzahl der Schritte in Zeiteinheiten (pro Sekunde)

Unsere Dienstleistungen: Wir bieten maßgeschneiderte Lösungen aus einer Hand für Original Design Manufacturing (ODM) und Original Equipment Manufacturing (OEM). Unsere Fähigkeiten umfassen elektronisches Design, Strukturdesign und Produktion.Darüber hinaus bieten wir Anpassungsdienste für Produkte wie Servos mit Funktionen wie PWM, RS485, 3V-24V-Betrieb und 0-360°-Feedback-Radsteuerung an.
Spezialisiert auf ODM und OEM sowie Sonderanfertigungen 1.Ihr Logo-Etikett oder -Druck
2.Servodraht
3.Verpackung: PE-Beutel, farbige Box, Plastikbox mit
Ihr Logo
4.Kabelstecker
5.Kundenspezifische Servos mit verschiedenen breiten Betriebsspannungen
9、PID-Parameter öffnen.
Unsere Produkte haben die CE- und ROHS-Zertifizierung bestanden und die meisten von ihnen haben Erscheinungspatente und Gebrauchsmusterpatente angemeldet
Unsere Produkte verfügen über die Zertifizierungen „CE“, „RoHS“ und „REACH“. Darüber hinaus besitzen wir Patente für das Erscheinungsbild und Modellpatente für unsere Designs.