







Feetech STS5420M – 7,4 V, 25 kg, 0,111 Sek./60°, 360° RC-Lenkservo, Hochgeschwindigkeits-Lenkservo mit niedrigem Profil, kurzes Gehäuse, magnetischer Encoder, Doppelwellen-TTL-Servo
Feetech STS5420M – 7,4 V, 25 kg, 0,111 Sek./60°, 360° RC-Lenkservo, Hochgeschwindigkeits-Lenkservo mit niedrigem Profil, kurzes Gehäuse, magnetischer Encoder, Doppelwellen-TTL-Servo
Feetech
Verfügbarkeit für Abholungen konnte nicht geladen werden
SPEZIFIKATIONEN
Markenname: Feetech
Herkunft: Festlandchina
Material: Kunststoff
Kunststofftyp: PC
RC-Teile und Zubehör: Batterien – LiPo
Größe: 10*10*10
Für Fahrzeugtyp: Autos
Verwenden Sie: Fahrzeuge und ferngesteuerte Spielzeuge
Teile/Zubehör aufrüsten: Lithiumbatterie
Fernsteuerungsperipheriegeräte/-geräte: Fernbedienung
Werkzeugzubehör: Batterie
Menge: 1 Stück
Technische Parameter: KV1100
Modellnummer: STS5420M-C001
Allradantriebsattribute: Motoren
Radstand: Schrauben
Modellnummer: STS5420M-C001
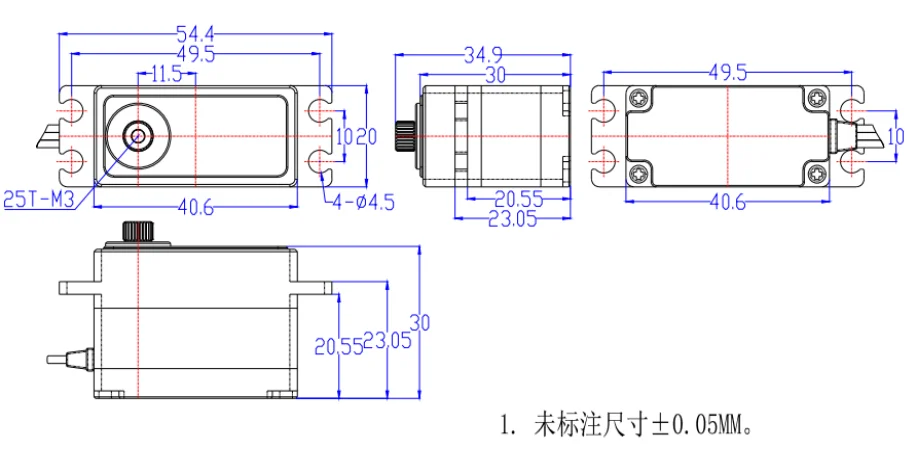
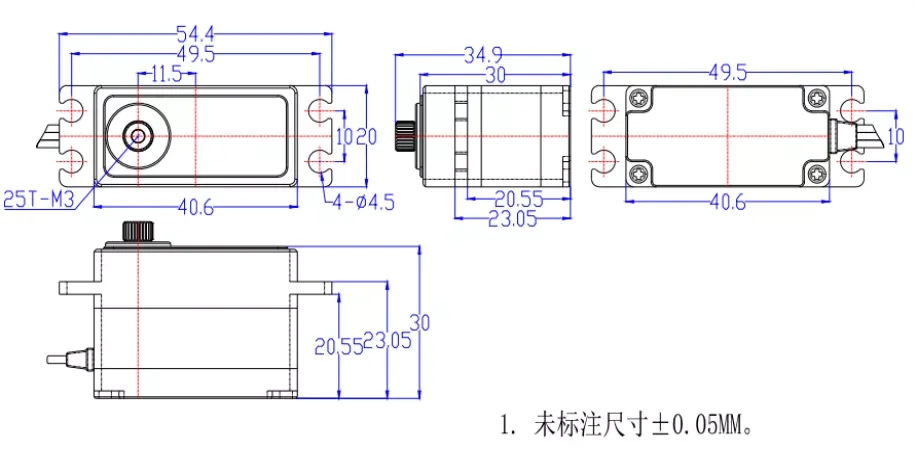
Größe: 40.6X20X30
Gewicht: 65.5± 1g
Getriebetyp: Kupfer
Grenzwinkel: KEIN Grenzwert
Lager: Kugellager
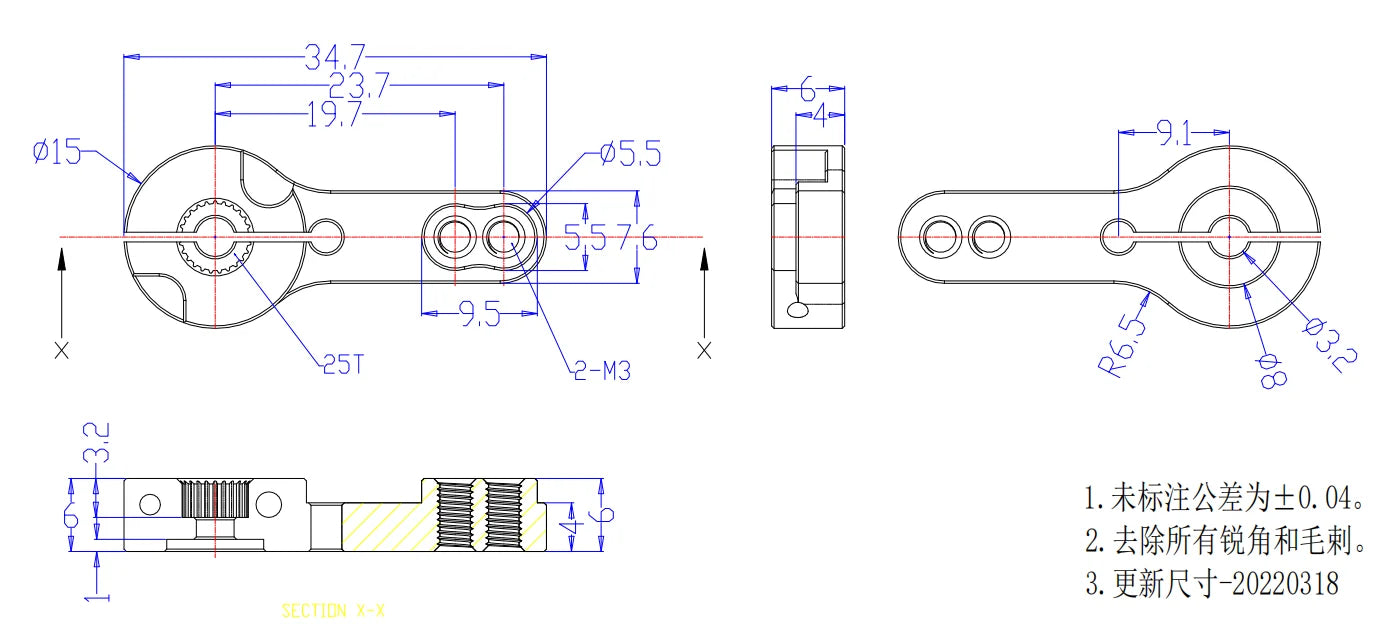
Hornzahnrad-Spline: 25T
Motor: Kernloser Motor
Betriebsspannungsbereich: 6-7.4V
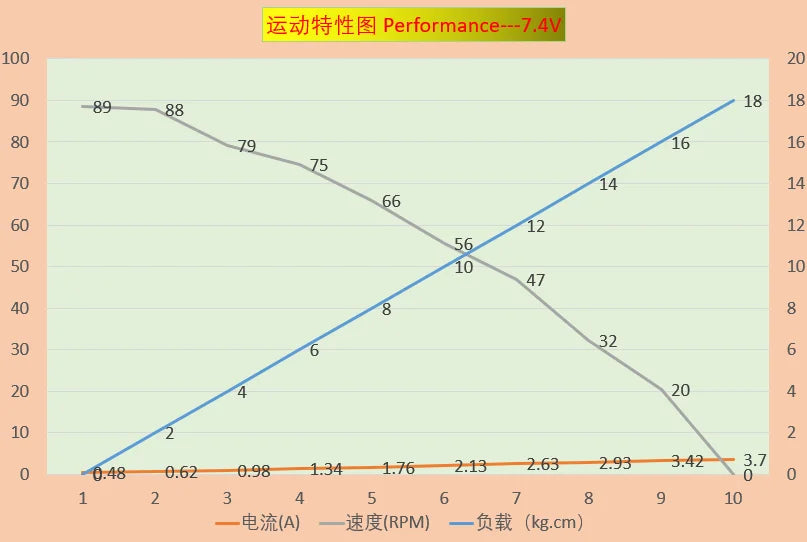
Spitzenstillstandsdrehmoment: 20.5kg.cm@6V
Nenndrehmoment: 5kg.cm@6V
Protokolltyp: Halbduplex-asynchrone serielle Kommunikation
Leerlaufgeschwindigkeit ±10 %: 0.133 Sek./60° (75 U/min)-0.111 Sek./60° (90 U/min)
Feetech Smart Servo wurde speziell für Anwendungen entwickelt, die eine starke und komplexe Betätigung erfordern, Großer Winkel:+_30.000 Umdrehungen (willkürlich absolut relativ) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||






|
(Artikel)
|
(Spezifikation)
|
(Bemerkungen)
|
||||||
|
Befehlssignal
|
Digitales Paket
|
|||||||
|
Protokolltyp
|
Asynchrone serielle Halbduplex-Kommunikation
|
8bit, 1stop,
Keine Parität |
||||||
|
ID-Bereich
|
0-253
|
Anpassbar
|
||||||
|
Kommunikationsbaudrate
|
38400bps ~ 1 Mbit/s
|
Anpassbar (1 Mbit/s)
|
||||||
|
Steuerungsalgorithmus
|
PID
|
Anpassbar
|
||||||
|
Neutrale Position
|
180°(2048)
|
|||||||
|
Laufgrad
|
360° (wenn 0~4096)
|
|||||||
|
Auflösung [Grad/Impuls]
|
0.088°(360°/4096)
|
|||||||
|
Drehrichtung
|
Im Uhrzeigersinn(0→4096)
|
Anpassbar
|
||||||
|
Feedback
|
Last, Position, Geschwindigkeit, Eingangsspannung, Strom, Temperatur
|
|||||||
|
(Artikel)
|
(Spezifikation)
|
(Bemerkungen)
|
||||||
|
Größe
|
40.6X20X30
|
Siehe Zeichnungen
|
||||||
|
Grenzwinkel
|
Keine Begrenzung
|
|||||||
|
Fallmaterial
|
Aluminium
|
|||||||
|
Zahnradmaterial
|
Stahl
|
|||||||
|
Lagertyp
|
Kugellager
|
|||||||
Related Collections







