HEX Pixhawk 2.1 PX4 PIX 32 Bit Flight Controller Autopilot – The Cube Orange + Standard-Set mit 3 GPS- und ADS-B-Trägerplatinen
HEX Pixhawk 2.1 PX4 PIX 32 Bit Flight Controller Autopilot – The Cube Orange + Standard-Set mit 3 GPS- und ADS-B-Trägerplatinen
RCDrone
Verfügbarkeit für Abholungen konnte nicht geladen werden
SPEZIFIKATIONEN
Radstand: Schrauben
Verwendung: Fahrzeuge und ferngesteuerte Spielzeuge
Upgrade-Teile/Zubehör: Arm
Werkzeugzubehör: Zusammengebaute Klasse
Technische Parameter: Wert 2
Größe: 1
Fernbedienungsperipheriegeräte/-geräte: Servos
Empfohlenes Alter: 12+y
RC Teile und Zubehör: Servos
Menge: 1 Stück
Herkunft: Festlandchina
Modellnummer: HEX-CUBE+
Material: Metall
Allradantriebsattribute: Baugruppe
Für Fahrzeugtyp: Autos
Zertifizierung: CE
Markenname: Feetech
Bitte beachten Sie: Der Unterschied zwischen Cube Orange und Cube Orange+ besteht darin, dass Cube Orange auf die PX4-Firmware aktualisiert werden kann, während Cube Orange+ kein PX4-Firmware-Upgrade unterstützt
Weitere Informationen finden Sie auf der offiziellen Website:https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview
Funktionen
- Unterstützt mehrere Modi wie Herumlungern, Höhenhaltung, Modus (mit Wegpunkten), Folgemodus usw.
- Unterstützt Mission Planner und QGroundControl-Bodenkontrollstationen
- Integrierter Flug Protokollierung
- Echtzeit-Flugdatenübertragung
- Unterstützt 360-Grad-Objektvermeidung
- Ausgestattet mit Hochleistungs-H7-Prozessor
H7 verfügt über doppelte Präzisions-(DP)-FPU, 1 MB RAM und 400-MHz-CPU-Prozessor sorgen für hohe Leistung, extrem schnellen Betrieb und eine stabile Lösung für den Flug.
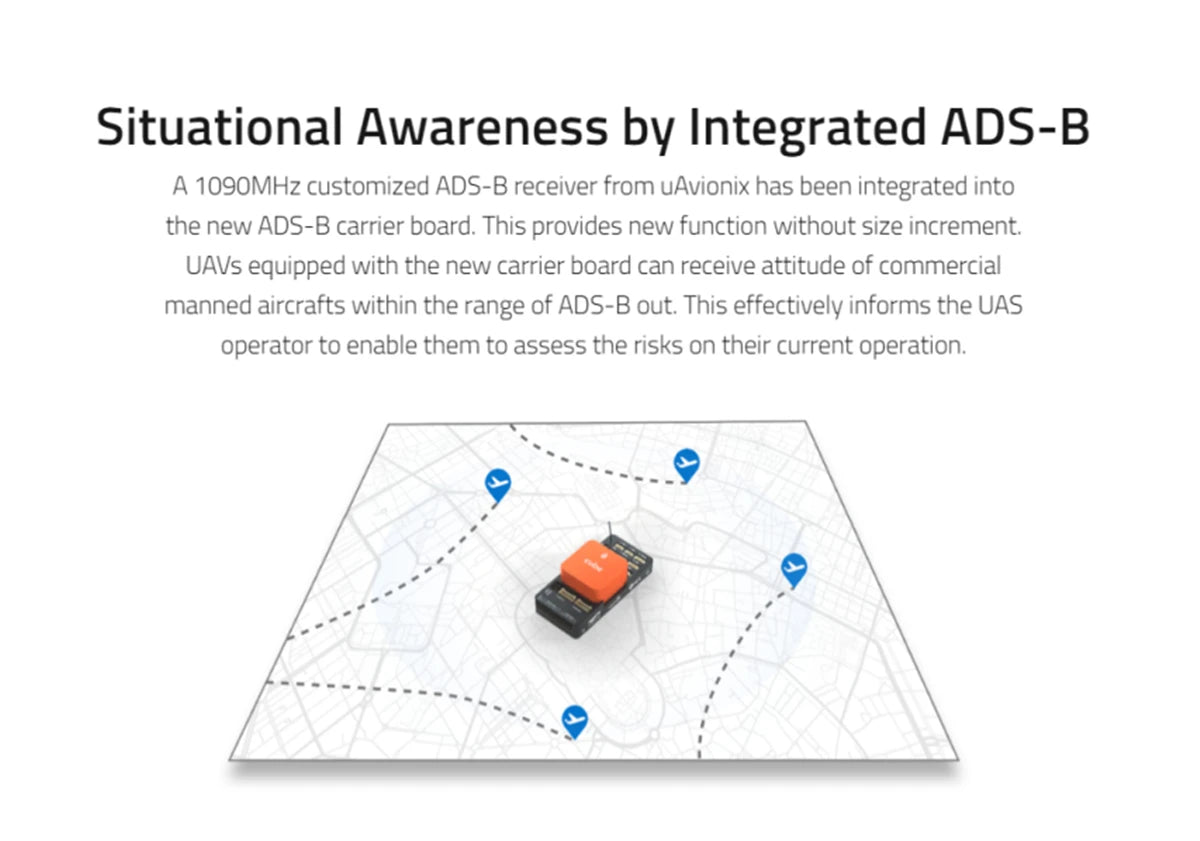
- Situationsbewusstsein durch integriertes ADS-B
A 1090 MHz angepasst Der ADS-B-Empfänger von uAvionix wurde in das neue ADS-B-Trägerboard integriert. Dies bietet neue Funktionen ohne Größenerhöhung. UAVs, die mit dem neuen Trägerboard ausgestattet sind, können die Fluglage kommerzieller bemannter Flugzeuge im Bereich von ADS-B aus empfangen. Dadurch wird der UAS-Betreiber effektiv informiert, damit er die Risiken seines aktuellen Betriebs einschätzen kann.
Einfaches Umschalten der PWM-Ausgangssignalspannung
Der PWM-Ausgang unterstützt das Umschalten zwischen 3,3-V- und 5-V-Signalpegeln. Die Spannungsumschaltung kann über die Software der Bodenkontrollstation erfolgen. Dies verbessert die Kompatibilität mit verschiedenen externen Peripheriegeräten.
Unterstützung für mehrere Fahrzeugtypen: einschließlich Hubschrauber, Multikopter, Starrflügel, VTOL, Rover, Boot, U-Boot usw.
Produktdetails
Hauptprozessor: STM32H757 (Der neue Chip hat eine gute Leistung)
Coprozessor: STM32F1
Unterstützte RC-Signale: PPM/SBUS/DSM
Stromredundanz: Dreifache Redundanz
Sensoren: Dreifach IMU-System
Sensordetails: ICM20649 (integrierter Beschleunigungsmesser + Gyroskop)
ICM20602 (integrierter Beschleunigungsmesser + Gyroskop)
ICM20948 (integrierter Beschleunigungsmesser + Gyroskop + Magnetometer)
MS5611 x 2 (Baro)
Firmware :Nicht unterstützte PX4-Open-Source-Flugcontroller-Firmware
Unterstützte Fahrzeugtypen: Starrflügelflugzeuge, Hubschrauber mit 3–8 Motoren, Hubschrauber, VTOL-Flugzeuge, Rover/Boote/U-Boote
Gewicht: 73 g
Chassis-Material :CNC-Aluminiumlegierung (Würfel) + ABS-Formteil (Trägerplatte)
Größe Würfel: 38,4 x 38,4 x 22 mm
Trägerplatte: 94,5 x 44,3 x 17,5 mm.3 mm
Betriebstemperatur: -10 bis +55 °C IMU mit Temperaturregelung
PWM-E/As:14
Serielle Mavlink-Schnittstelle:2
Anzahl der unterstützten GPS-Geräte:2
Debug-Schnittstelle:1
I2C-Schnittstelle:1
CAN-Schnittstelle:2
Hier3
GNSS: Ja
Kompass: Ja
Protokoll: CAN
Echtzeit-Betriebssystem: Ja
Firmware-Update: Ja
RTK: Ja
Staubdicht, spritzwassergeschützt: Ja
Empfängertyp: u-blox M8 hochpräzise GNSS-Module (M8P)
Satellitenkonstellation: GPS L1C/A, GLONASS L1OF, BeiDou B1I
Positionierungsgenauigkeit: 3D FIX: 2,5 m / RTK: 0,025 m
Prozessor: STM32F302
IMU-Sensor: ICM20948
Navigationsaktualisierungsrate: Max. 8 Hz
Kommunikationsprotokoll: CAN
Betriebstemperatur: -40 °C bis 85 °C
Abmessungen: 76 mm x 76 mm x 16,6 mm
Gewicht: 48,8 g





Der HEX Pixhawk 2.1 von PX4 ist der weltweit fortschrittlichste Autopilot für offene autonome unbemannte Fahrzeuge. Dieser würfelförmige Controller verfügt über redundante, temperaturgesteuerte und isolierte Komponenten.
Das Trägerboard verfügt über einen maßgeschneiderten ADS-B-Empfänger von uAvionix, der mit 1090 MHz arbeitet und es UAS-Betreibern ermöglicht, potenzielle Risiken in ihrem aktuellen Betrieb einzuschätzen.

Der PWM-Ausgang unterstützt das Umschalten zwischen 3,3-V- und 5-V-Signalpegeln, sodass Sie die Software der Bodenkontrollstation verwenden können, um zwischen diesen beiden Spannungspegeln umzuschalten.
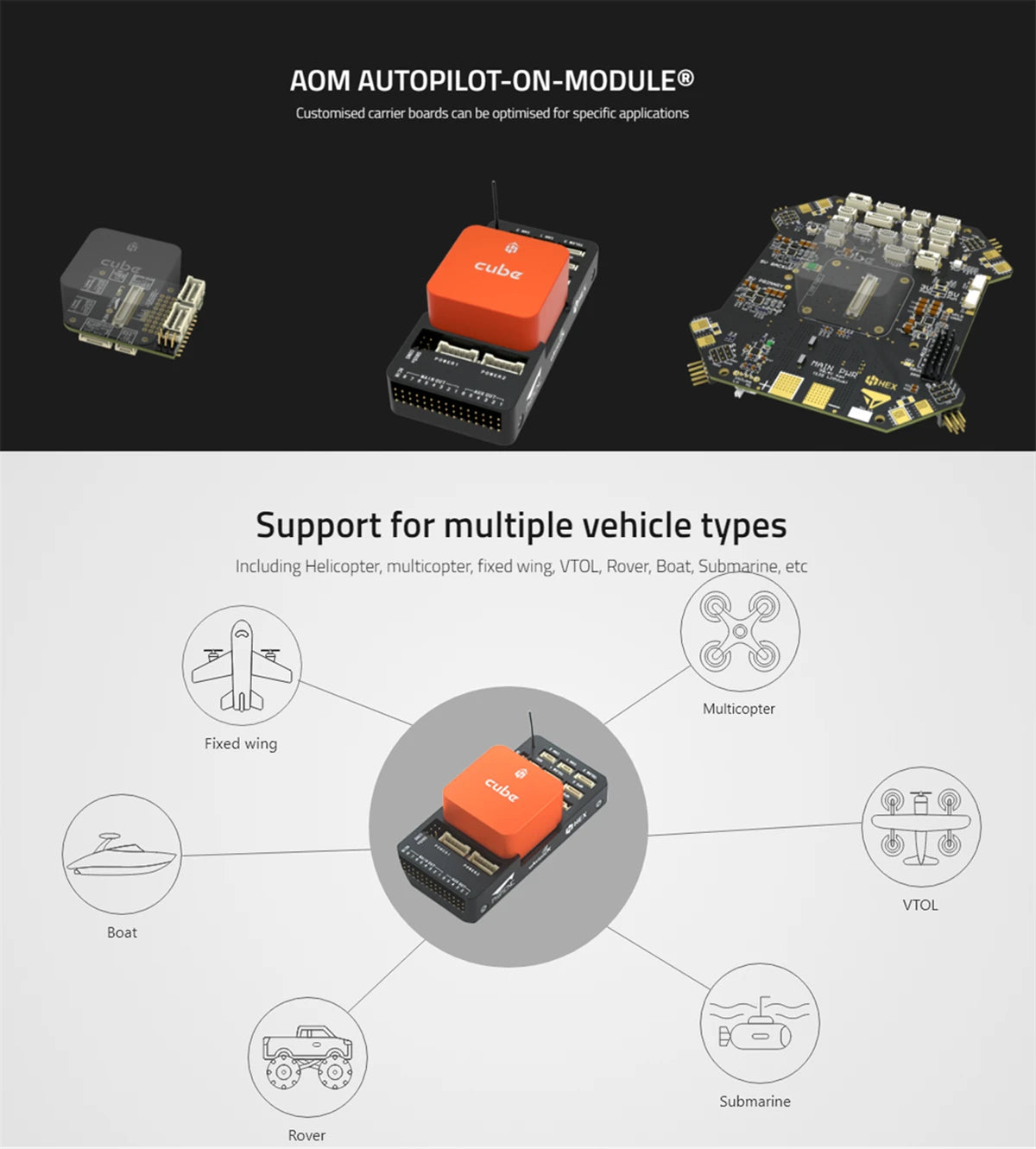
Das APM (Autopilot-on-Module) bietet maßgeschneiderte Trägerplatinen, die für bestimmte Anwendungen optimiert werden können und mehrere Fahrzeugtypen unterstützen, darunter Hubschrauber, Multikopter, Starrflügler, VTOLs, Rover, Boote und U-Boote , und viele andere.
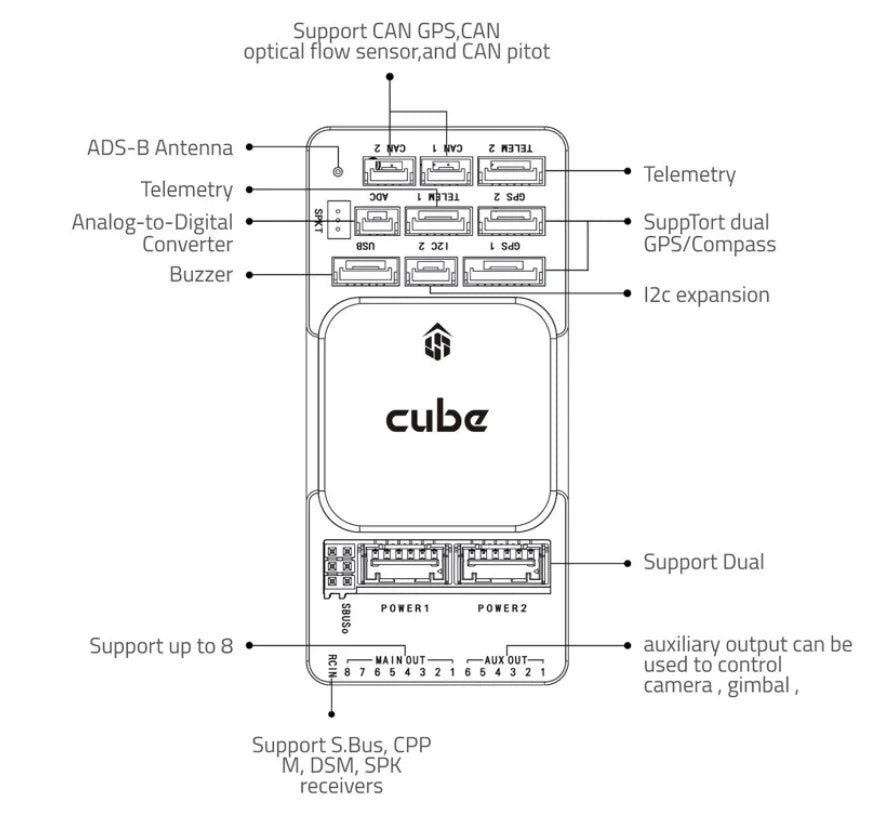
Dieser Flugcontroller unterstützt verschiedene Peripheriegeräte, darunter: * CAN-Bus für GPS, optischen Durchflusssensor und Pitot-Daten * ADS-B-Antenne für verbesserte Navigation * Telemetriefunktionen mit SD9-Analog-Digital-Umwandlung * I2C-Erweiterungsmöglichkeiten für zusätzliche Sensoren oder Geräte * Duale Stromversorgungsoptionen für Redundanz * Bis zu 8 Hilfsausgänge, die zur Steuerung verschiedener Geräte verwendet werden können, wie zum Beispiel: + 6 Kameras oder Gimbals über S-Bus-Protokoll

Dieser Flugcontroller verfügt über ein verbessertes Design mit Wasserbeständigkeit, wodurch er für den Einsatz in verschiedenen Umgebungen geeignet ist. Darüber hinaus verfügt es über einen kostengünstigen hochpräzisen GNSS-Chip, der präzise Positionierungsfunktionen ermöglicht (Hinweis: Für den Real-Time Kinematic (RTK)-Modus ist eine Basisstation erforderlich).
Related Collections