

Hochdrehmoment HTDW-4438-30-NE Motor, 30:1 Untersetzung, 2Nm Nennmoment, 45 U/min, 12-48V, 14-Bit-Encoder
Hochdrehmoment HTDW-4438-30-NE Motor, 30:1 Untersetzung, 2Nm Nennmoment, 45 U/min, 12-48V, 14-Bit-Encoder
HIGH TORQUE
Normaler Preis
$306.00 USD
Normaler Preis
Verkaufspreis
$306.00 USD
Grundpreis
pro
Inkl. Steuern.
Versand wird beim Checkout berechnet
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der HIGH TORQUE HTDW-4438-30-NE Motor ist ein kompaktes Hochdrehmomentmotor-Modul mit einem Übersetzungsverhältnis von 30, integriertem Encoder-Feedback (14-Bit-Eingang und 14-Bit-Ausgang) und leistungsbezogenen Parametern für Geschwindigkeits-/Positionskontrolle, die für Robotergelenke und Bewegungsmodule geeignet sind. Für technischen Support und Fragen vor dem Kauf kontaktieren Sie [email protected] or besuchen Sie https://rcdrone.top/.
Anwendungen
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadrupedale Roboter
- AGV-Fahrzeuge
- ARU-Roboter
Hauptmerkmale
- Modell: HTDW-4438-30-NE (HOCHDREHMOMENT)
- Übersetzungsverhältnis: 30
- Duale Encoder-Rückmeldung: 14-Bit Eingangs-Encoder-Auflösung und 14-Bit Ausgangs-Encoder-Auflösung
- Kommunikationsbaudrate: 5 Mbps
- Steuerfrequenz: 3 kHz
Technische Daten
| Länge und Breite | 44mm |
| Höhe | 40mm |
| Gewicht | 194g |
| Rückschlag | <10Arcmin |
| Wiederholgenauigkeit der Positionierung | <12Arcmin |
| Absolute Positionierungsgenauigkeit | <15Arcmin |
| Drehmomentkonstante | 0.039Nm/A |
| Anzahl der Polpaare | 14 |
| Übersetzungsverhältnis | 30 |
| Blockiermoment | 10Nm |
| Leerlaufdrehzahl | 75RPM |
| Nennmoment | 2Nm |
| Nenndrehzahl | 45RPM |
| Bewertung | 6W |
| Spannungsbereich | 12-48V |
| Spitzenstrom | 5A |
| Nennstrom | 1A |
| Geschwindigkeitsregelgenauigkeit | ±10% |
| Regelgenauigkeit | ±20% |
| Reaktionszeit | ≤200us |
| Eingangs-Encoder-Auflösung | 14-Bit |
| Ausgangs-Encoder-Auflösung | 14-Bit |
| Baudrate | 5Mbps |
| Steuerfrequenz | 3kHz |
Handbücher & Dokumente
- HOCHDREHMOMENT Motor Debugging-Assistent Benutzerhandbuch (PDF)
- Debugging-Handbuch (PDF)
- 1.2 fdcan Protokollanalyse (PDF)
- Benutzerhandbuch (PDF)
- Installationszeichnung (PDF)
- HTDW-4438-30-NE 3D Modell (STEP)
Details

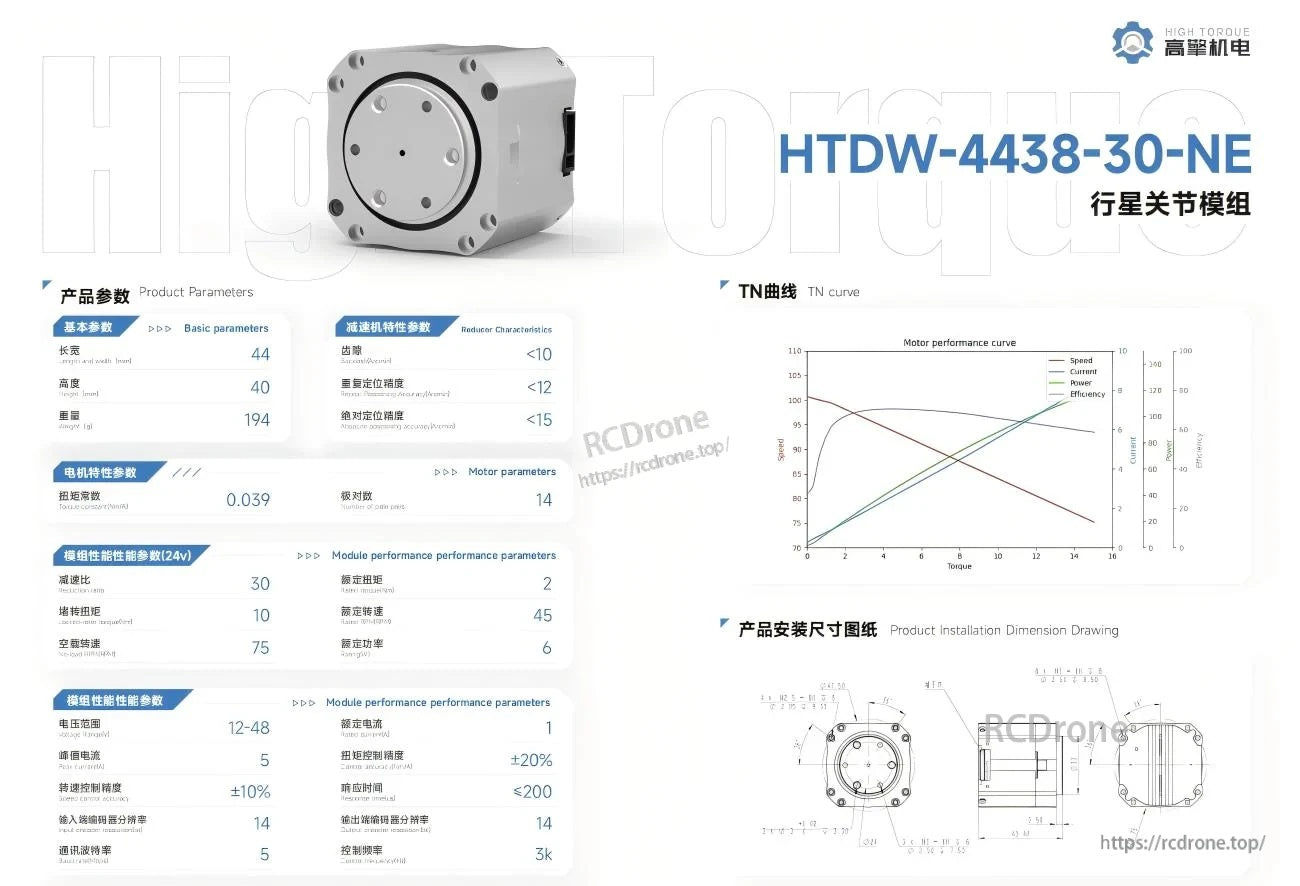
Die wichtigsten Parameter und Installationsmaße für den HTDW-4438-30-NE sind für eine schnelle Integrationsplanung zusammengefasst.
Related Collections

