

Hochdrehmoment HTDW-6056-36-NE Motormodul, 36:1 Untersetzung, 10Nm Nennmoment, 12-48V, 14-Bit-Encoder
Hochdrehmoment HTDW-6056-36-NE Motormodul, 36:1 Untersetzung, 10Nm Nennmoment, 12-48V, 14-Bit-Encoder
HIGH TORQUE
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der HIGH TORQUE HTDW-6056-36-NE Motor ist ein Hochdrehmomentmotor-Modul mit einem Reduktionsverhältnis von 36, das für Anwendungen in Robotikgelenken und Aktuatoren entwickelt wurde, die eine kontrollierte Niedriggeschwindigkeitsausgabe erfordern. Zu den wichtigsten Betriebsparametern gehören 12-48V Eingang, 10Nm Nennmoment bei 50RPM und 36Nm Festdrehmoment.
Hauptmerkmale
- Modellbezeichnung: HTDW-6056 / HTDW-6056-36-NE
- Übersetzungsverhältnis: 36
- Niedriger Spiel und Positionierungsleistung: Spiel <10Arcmin; Wiederholgenauigkeit <12Arcmin; absolute Positionierungsgenauigkeit <15Arcmin
- Encoder-Auflösungen: Eingangs-Encoder 14-Bit; Ausgangs-Encoder 14-Bit
- Steuerungs-/Kommunikationsparameter: Baudrate 5Mbps; Steuerfrequenz 3kHz; Reaktionszeit ≤200us
Technische Daten
| Länge und Breite | 60mm |
| Höhe | 56mm |
| Gewicht | 565g |
| Spiel | <10Arcmin |
| Wiederholgenauigkeit | <12Arcmin |
| Absolute Positionierungsgenauigkeit | <15Arcmin |
| Drehmomentkonstante | / |
| Anzahl der Polpaare | 14 |
| Übersetzungsverhältnis | 36 |
| Blockiermoment | 36Nm |
| Leerlaufdrehzahl | 60RPM |
| Nennmoment | 10Nm |
| Nenndrehzahl | 50RPM |
| Bewertung | 52W |
| Spannungsbereich | 12-48V |
| Spitzenstrom | 10A |
| Geschwindigkeitsregelgenauigkeit | ±10% |
| Eingangs-Encoder-Auflösung | 14-Bit |
| Baudrate | 5Mbps |
| Nennstrom | 3A |
| Regelgenauigkeit | ±20% |
| Reaktionszeit | ≤200us |
| Ausgangsencoder-Auflösung | 14-Bit |
| Steuerfrequenz | 3kHz |
Anwendungen
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadruped-Roboter
- AGV-Fahrzeuge
- ARU-Roboter
Für Integrationsfragen und Vorverkaufsbestätigungen kontaktieren Sie den Support unter https://rcdrone.top/ oder per E-Mail [email protected] .
Handbücher
- HIGH TORQUE Motor Debugging Assistant Benutzerhandbuch (PDF)
- Debugging-Handbuch (PDF)
- 1.2 FDCAN Protokollanalyse (PDF)
- Benutzerhandbuch (PDF)
- HTDW-6056-36-NE Produktstrukturdiagramm (PDF)
- HIGH TORQUE HTDW-6056-36-NE Motor 3D Modell (STP)
Details

Ein kompaktes Hochdrehmoment-Gelenkmotor-Modul, das für eine kontrollierte Niedriggeschwindigkeits-Ausgabe von Roboteraktoren entwickelt wurde.
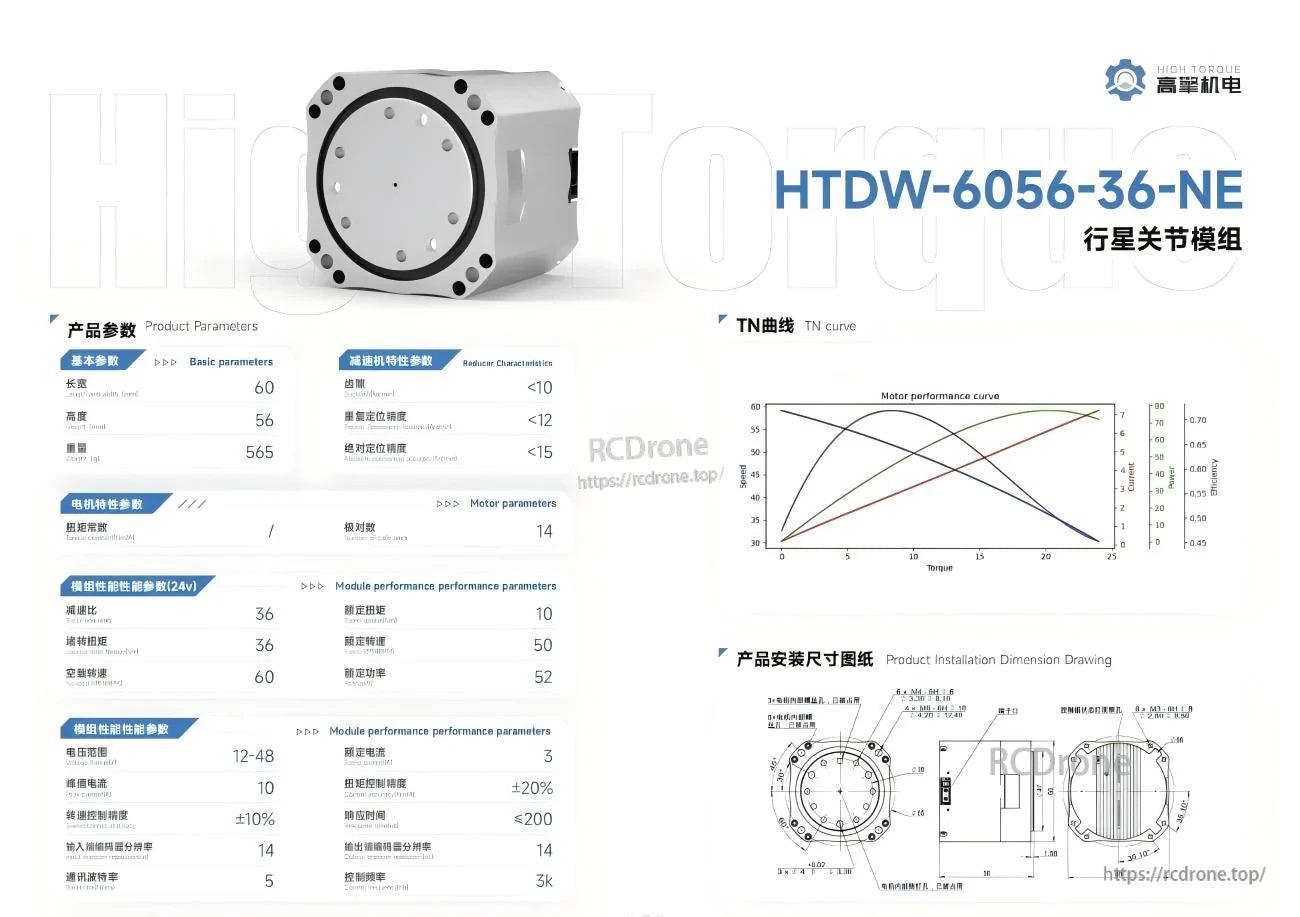
Wichtige Spezifikationen, Drehmoment-Geschwindigkeits-Kurve und Installationsmaße sind zusammengefasst, um eine schnellere mechanische Integration zu ermöglichen.
Related Collections

