Holybro DroneCAN M8N GPS-Modul – STM32G4-Prozessor, BMM150-Kompass, 3GNSS-Unterstützung, DroneCAN-Protokoll
Holybro DroneCAN M8N GPS-Modul – STM32G4-Prozessor, BMM150-Kompass, 3GNSS-Unterstützung, DroneCAN-Protokoll
HolyBro
Verfügbarkeit für Abholungen konnte nicht geladen werden
Beschreibung
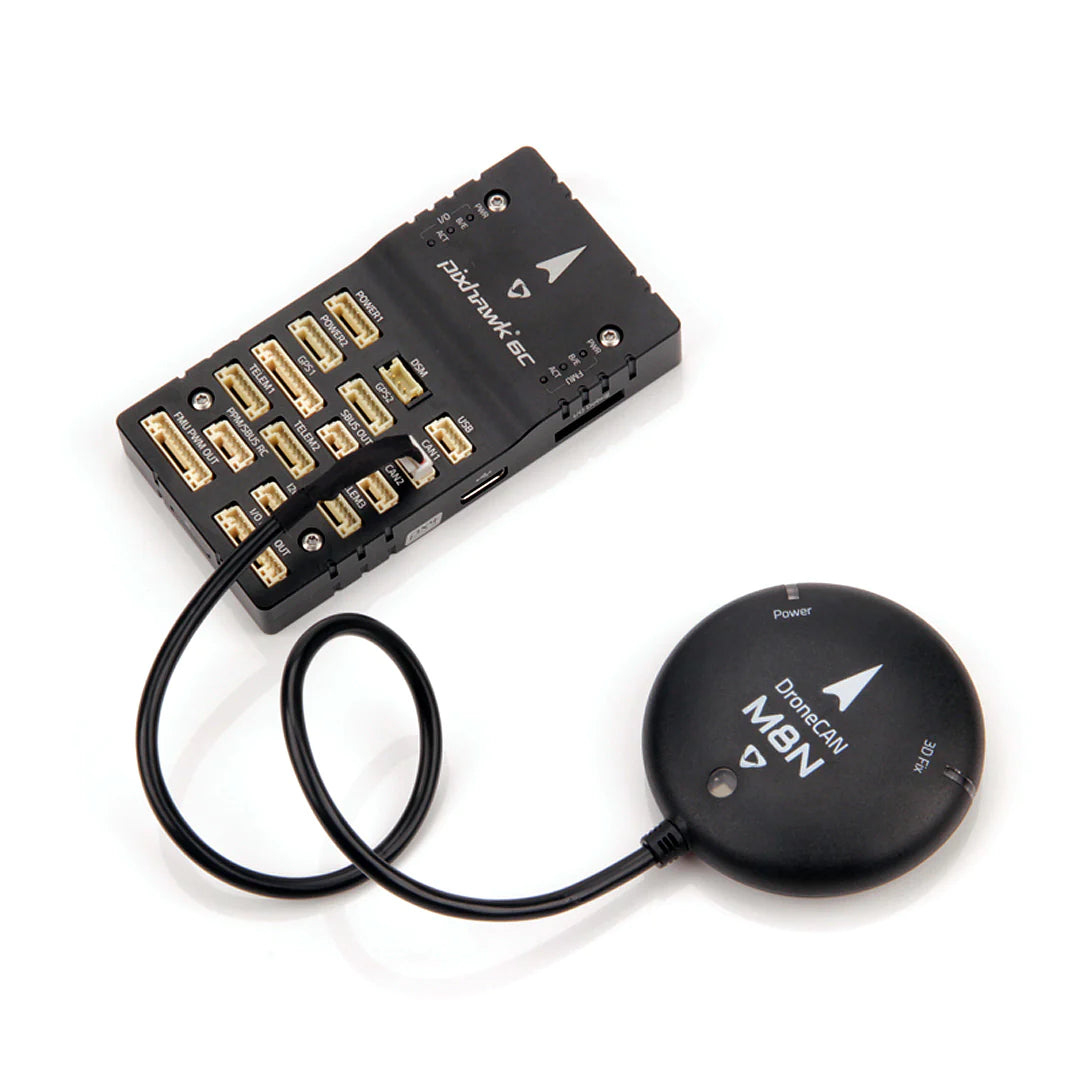
Das Holybro DroneCAN GPS verfügt über ein UBLOX M8N- oder M9N-Modul, einen BMM150-Kompass und eine dreifarbige LED-Anzeige. Es verfügt über den STM32G4-Prozessor und übernimmt das DroneCAN-Protokoll für die Kommunikation, was es im Vergleich zur seriellen Verbindung zuverlässiger und besser im Umgang mit elektromagnetischen Störungen macht. Es belegt keinen seriellen Port des Flugcontrollers und über eine CAN-Splitterplatine können verschiedene CAN-Geräte an denselben CAN-Bus angeschlossen werden.
Spezifikation:
| DroneCAN M8N | |
| GNSS-Empfänger | Ublox NEO M8N |
| Anzahl gleichzeitiger GNSS | Bis zu 3 GNSS (GPS, Galileo, GLONASS, BeiDou) |
| Prozessor | STM32G4 (170 MHz, 512 K FLASH) |
| Kompass | BMM150 |
| Frequenzband | GPS: L1C/A GLONASS: L10F Beidou: B1I Galileo: E1B/C |
| GNSS-Erweiterungssystem | SBAS: WAAS, EGNOS, MSAS, QZSS |
| Navigationsaktualisierung | 5Hz Standard (10Hz MAX) |
| Genauigkeit | 2,5m |
| Geschwindigkeitsgenauigkeit | 0,05 m/s |
| Maximale Anzahl an Satelliten | 22+ |
| Kommunikationsprotokoll | DroneCAN @ 1 Mbit/s |
| Unterstützt Autopilot FW | PX4, Ardupilot |
| Porttyp | GHR-04V-S |
| Antenne | 25 x 25 x 4 mm Keramik-Patchantenne |
| Stromverbrauch | Weniger als 200 mA bei 5 V |
| Spannung | 4,7-5,2V |
| Betriebstemperatur | -40~80C |
| Größe | Durchmesser: 54 mm Dicke: 14,5 mm |
| Gewicht | 36g |
| Kabellänge | 26cm |
| Andere Hinweise | - LNA MAX2659ELT+ HF-Verstärker - Wiederaufladbare Farah-Kapazität - Rauscharmer 3,3-V-Regler |
Weitere technische Informationen finden Sie unter https://docs.holybro.com/
DroneCAN
DroneCAN ist das primäre CAN-Protokoll, das von den ArduPilot- und PX4-Projekten für die Kommunikation mit CAN-Peripheriegeräten verwendet wird. Es handelt sich um ein offenes Protokoll mit offener Kommunikation, Spezifikation und mehreren offenen Implementierungen.
DroneCAN-Entwicklung
Das DroneCAN-Projekt verfügt über eine aktive Entwicklungsgemeinschaft.
- Diskussionen über Discord unter https://dronecan.org/discord
- Entwicklung auf Github unter https://github.com/DroneCAN
Related Collections