





Holybro Pix32 v6 Flight Controller – basierendes STM32H743 FC-Modul, Standard-Set, Mini-Set mit M8N/M9N/M10 GPS
Holybro Pix32 v6 Flight Controller – basierendes STM32H743 FC-Modul, Standard-Set, Mini-Set mit M8N/M9N/M10 GPS
HolyBro
Verfügbarkeit für Abholungen konnte nicht geladen werden
Der Pix32 v6 ist das neueste Update der pix32 v5 Flugcontroller. Es handelt sich um eine Variante des Pixhawk 6C. Es besteht aus einem separaten Flugcontroller und einer Trägerplatine, die über einen 100-poligen Stecker verbunden sind. Es wurde für Piloten entwickelt, die ein leistungsstarkes, flexibles und anpassbares Flugsteuerungssystem benötigen.
Im Pix32 v6 finden Sie einen auf STMicroelectronics® basierenden STM32H743, gepaart mit Sensortechnologie von Bosch® und InvenSense®, der Ihnen Flexibilität und Zuverlässigkeit bei der Steuerung jedes autonomen Fahrzeugs bietet, das sowohl für akademische als auch kommerzielle Anwendungen geeignet ist.
Der H7-Mikrocontroller des Pix32 v6 enthält den Arm® Cortex®-M7-Kern mit bis zu 480 MHz, verfügt über 2 MB Flash-Speicher und 1 MB RAM. Dank der aktualisierten Rechenleistung können Entwickler ihre Entwicklungsarbeit produktiver und effizienter gestalten und komplexe Algorithmen und Modelle erstellen. Es verfügt über leistungsstarke, geräuscharme IMUs an Bord, die kosteneffizient sind und gleichzeitig über IMU-Redundanz verfügen. Ein Vibrationsisolationssystem zum Herausfiltern hochfrequenter Vibrationen und zur Reduzierung von Geräuschen, um genaue Messwerte zu gewährleisten und es Fahrzeugen zu ermöglichen, insgesamt bessere Flugleistungen zu erzielen.
Dieser Flugcontroller ist perfekt für Leute, die einen erschwinglichen und modularen Flug suchen Controller, der ein benutzerdefiniertes Baseboard verwenden kann. Wir haben die Schaltpläne der pix32 v6-Basisplatine veröffentlicht. Sie können entweder selbst eine individuelle Trägerplatine erstellen oder sich einfach von uns dabei helfen lassen. Durch die Verwendung einer individuell angepassten Grundplatine können Sie sicherstellen, dass die physische Größe, die Pinbelegung und die Stromverteilungsanforderungen perfekt zu Ihrem Fahrzeug passen. So stellen Sie sicher, dass Sie über alle Anschlüsse verfügen, die Sie benötigen, und nicht über die Kosten und Unmengen an Anschlüssen, die Sie nicht benötigen.
Wichtige Designpunkte:
- Hochleistungs-STM32H743-Prozessor mit mehr Rechenleistung und RAM
- Neues kostengünstiges Design mit flachem Formfaktor
- Neu entwickeltes integriertes Schwingungsisolationssystem, um hochfrequente Schwingungen herauszufiltern und Geräusche zu reduzieren, um genaue Messwerte zu gewährleisten
- IMUs werden durch integrierte Heizwiderstände temperaturgesteuert, was eine optimale Arbeitstemperatur der IMUs ermöglicht
Hinweis:
- Vergleichstabelle für Leistungsmodule
- M10 GPS erfordert PX4 1.14, ArduPilot 4.3 oder neuer ist erforderlich. (Seit dem 7. September 2023 hat PX4 1.14 RC1 (Release Candidate) veröffentlicht. Bitte überprüfen Sie diesen Link für die neuesten Release-Details. Weitere Details zum Flashen der RC-Release finden Sie hier.)
Entwerfen Sie mithilfe der bereitgestellten Referenzdesigndatei ganz einfach Ihre eigene individuelle Fußleiste.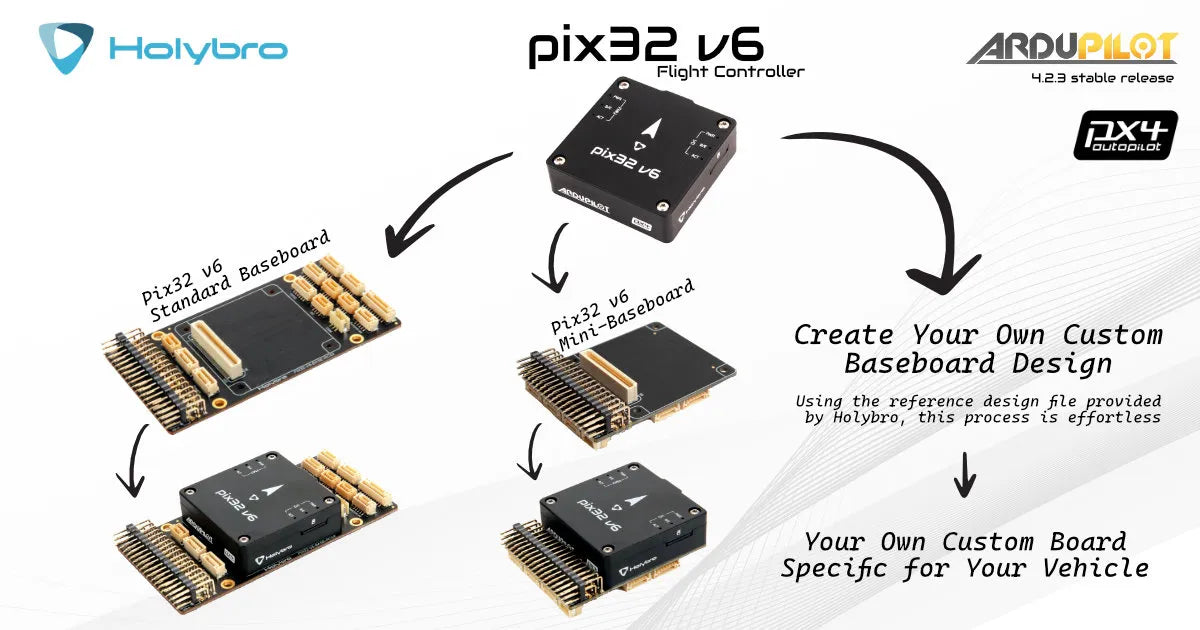
SKU20190/20192 Enthält:
- Pix32 v6 Flight Controller Modul
- Standard-Baseboard / Mini-Baseboard
- PM02 V3 12S Leistungsmodul
- Standardkabelsatz
SKU20191/SKU20193 Beinhaltet:
- Pix32 v6 Flugsteuerungsmodul
- Standard-Baseboard / Mini-Baseboard
- PM02 V3 12S Leistungsmodul
- Mini-Kabelsatz
- M8N GPS / M9N GPS / M10 GPS
Hinweis: Das Pix32v6-Standardset wird bis auf weiteres mit dem Pix32v5-Baseboard geliefert. Weitere Informationen zum Baseboard finden Sie hier.
Related Collections












