Holybro Pixhawk 4 Autopilot-Flugcontroller
Holybro Pixhawk 4 Autopilot-Flugcontroller
HolyBro
Verfügbarkeit für Abholungen konnte nicht geladen werden
Pixhawk® 4 verfügt über fortschrittliche Prozessortechnologie von STMicroelectronics®, Sensortechnologie von Bosch®, InvenSense® und ein NuttX-Echtzeitbetriebssystem und bietet unglaubliche Leistung, Flexibilität und Zuverlässigkeit für die Steuerung jedes autonomen Fahrzeugs.
Der Mikrocontroller des Pixhawk 4 verfügt über einen 2 MB großen Flash-Speicher und 512 KB RAM. Dank der erhöhten Leistung und RAM-Ressourcen können Entwickler ihre Entwicklungsarbeit produktiver und effizienter gestalten. Komplexere Algorithmen und Modelle können auf dem Autopiloten implementiert werden.
Die leistungsstarken, geräuscharmen IMUs an Bord sind für Stabilisierungsanwendungen konzipiert. Datenbereite Signale von allen Sensoren werden an separate Interrupt- und Timer-Capture-Pins am Autopiloten weitergeleitet, wodurch eine präzise Zeitstempelung der Sensordaten möglich ist. Neu entwickelte Vibrationsisolationen ermöglichen genauere Messwerte, sodass die Fahrzeuge insgesamt bessere Flugleistungen erzielen können.
Die beiden externen SPI-Busse und sechs zugehörigen Chip-Select-Leitungen ermöglichen das Hinzufügen zusätzlicher Sensoren und SPI-angebundener Nutzlast. Es gibt insgesamt vier I2C-Busse, zwei davon für die externe Nutzung und zwei mit seriellen Anschlüssen für GPS-/Kompassmodule.
Notiz:
- M10 GPS Erfordert PX4 1.14 und ArduPilot 4.3 oder neuer.
- Vergleichstabelle für Leistungsmodule
Technische Spezifikationen
- Haupt-FMU-Prozessor
- STM32F765 - 32 Bit Arm® Cortex®-M7, 216 MHz, 2 MB Speicher, 512 KB RAM
- STM32F765 - 32 Bit Arm® Cortex®-M7, 216 MHz, 2 MB Speicher, 512 KB RAM
- IO-Prozessor
- STM32F103 – 32 Bit Arm® Cortex®-M3, 72 MHz, 64 KB SRAM (aktuell)
- STM32F100 – 32 Bit Arm® Cortex®-M3, 24 MHz, 8 KB SRAM (nicht mehr erhältlich)
- Integrierte Sensoren
- Beschleunigung/Gyro: ICM-20689
- Beschleunigung/Gyro: BMI055/ICM-20602
- Magazin: IST8310
- Barometer: MS5611
- Beschleunigung/Gyro: ICM-20689
Elektrische Daten
- Ausgang des Leistungsmoduls: 4,9 ~ 5,5 V
- Maximale Eingangsspannung: 6 V
- Maximale Strommessung: 120 A
- USB-Stromversorgungseingang: 4,75–5,25 V
- Servoschieneneingang: 0 ~ 36 V
- Betriebstemperatur: -25-85°C
Mechanische Daten
- Abmessungen: 44x84x12mm
- Gewicht (Kunststoffgehäuse): 33.3 g
- Gewicht (Aluminiumgehäuse): 49g
Downloads:
Artikelnummer 11032/11035 Beinhaltet:
- Pixhawk 4 Flugcontroller (Kunststoff oder Aluminium)
- Kabelsatz
Artikelnummer 20045/20046/20114/20115 Beinhaltet:
- Pixhawk 4 Flugcontroller (Kunststoff oder Aluminium)
- Leistungsmodul: PM02 V3 12S/PM07 14S
- Kabelsatz
Artikelnummer 20139/20140/20141/20142/20269/20270/20271/20272 Beinhaltet:
- Pixhawk 4 Flugsteuerung
- Leistungsmodul: PM02 V3 12S/PM07 14S
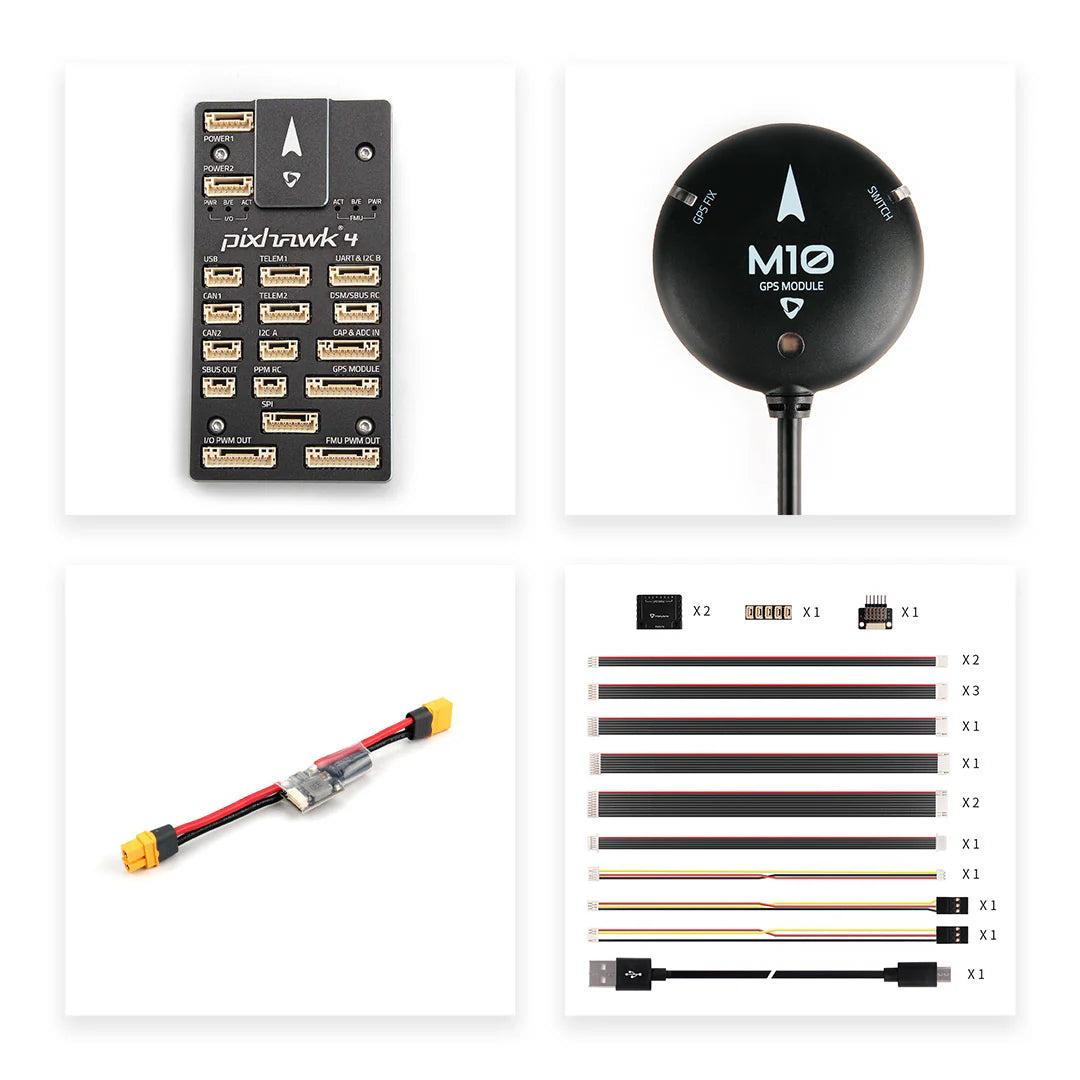
- Geographisches Positionierungs System: M9N/M10
- Kabelsatz

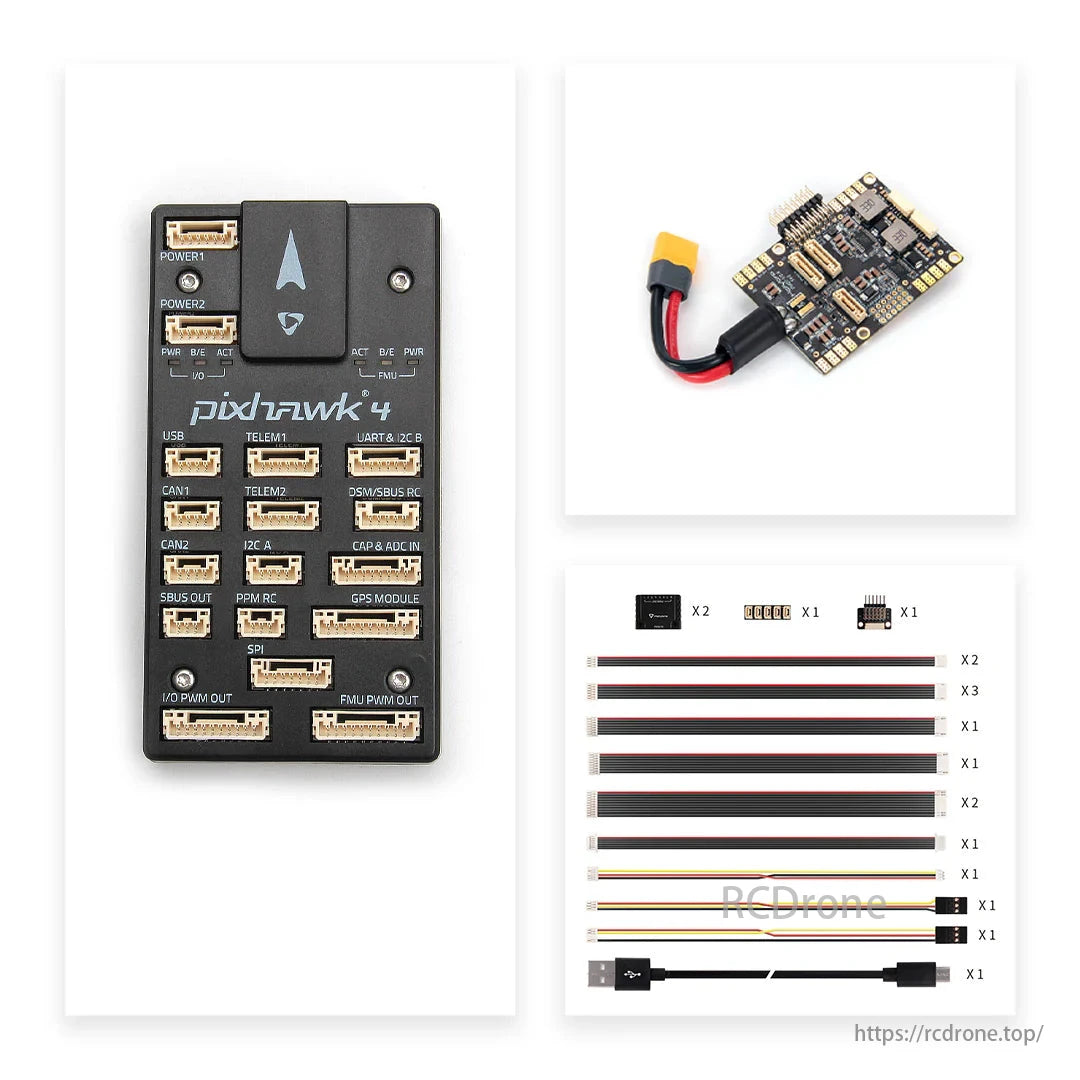
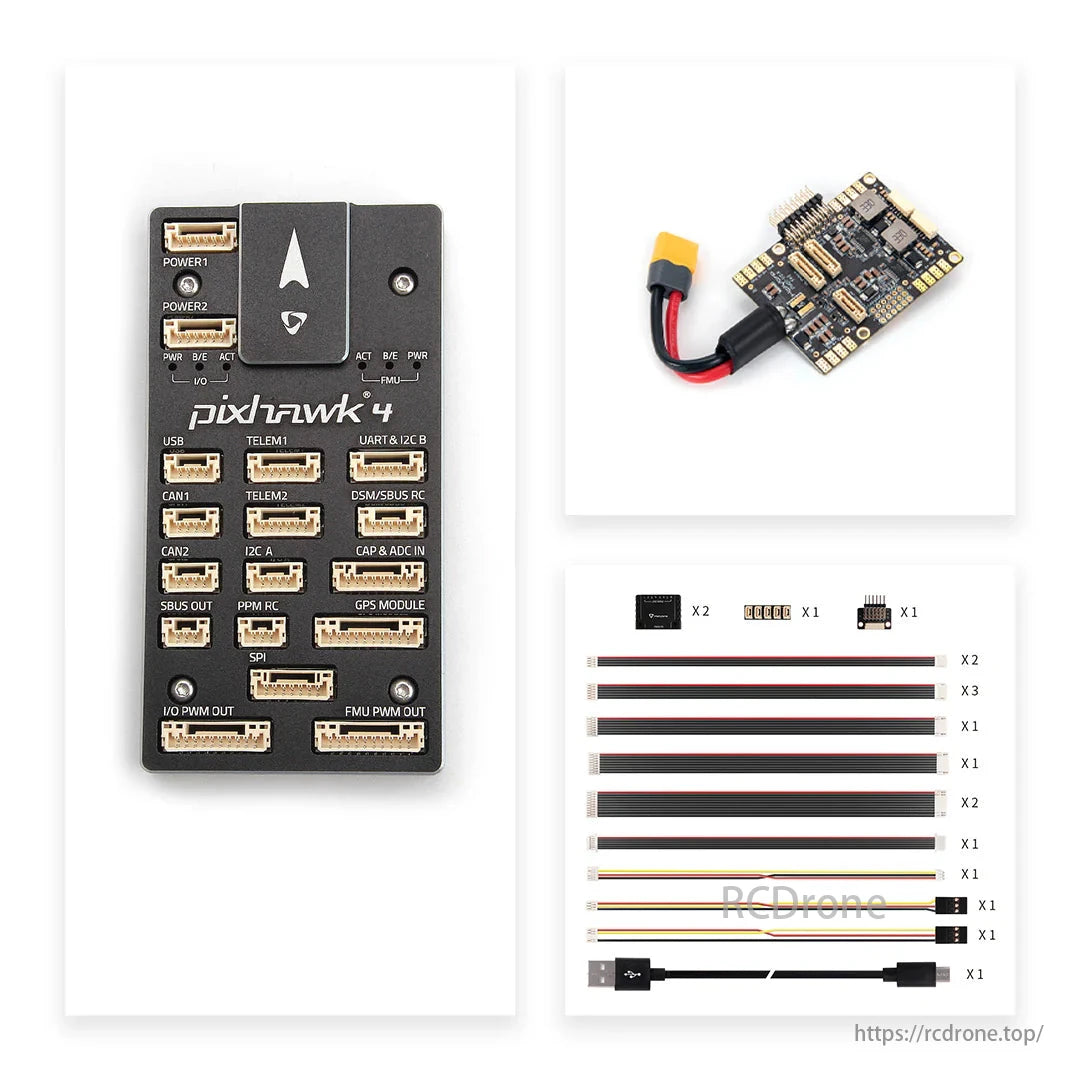
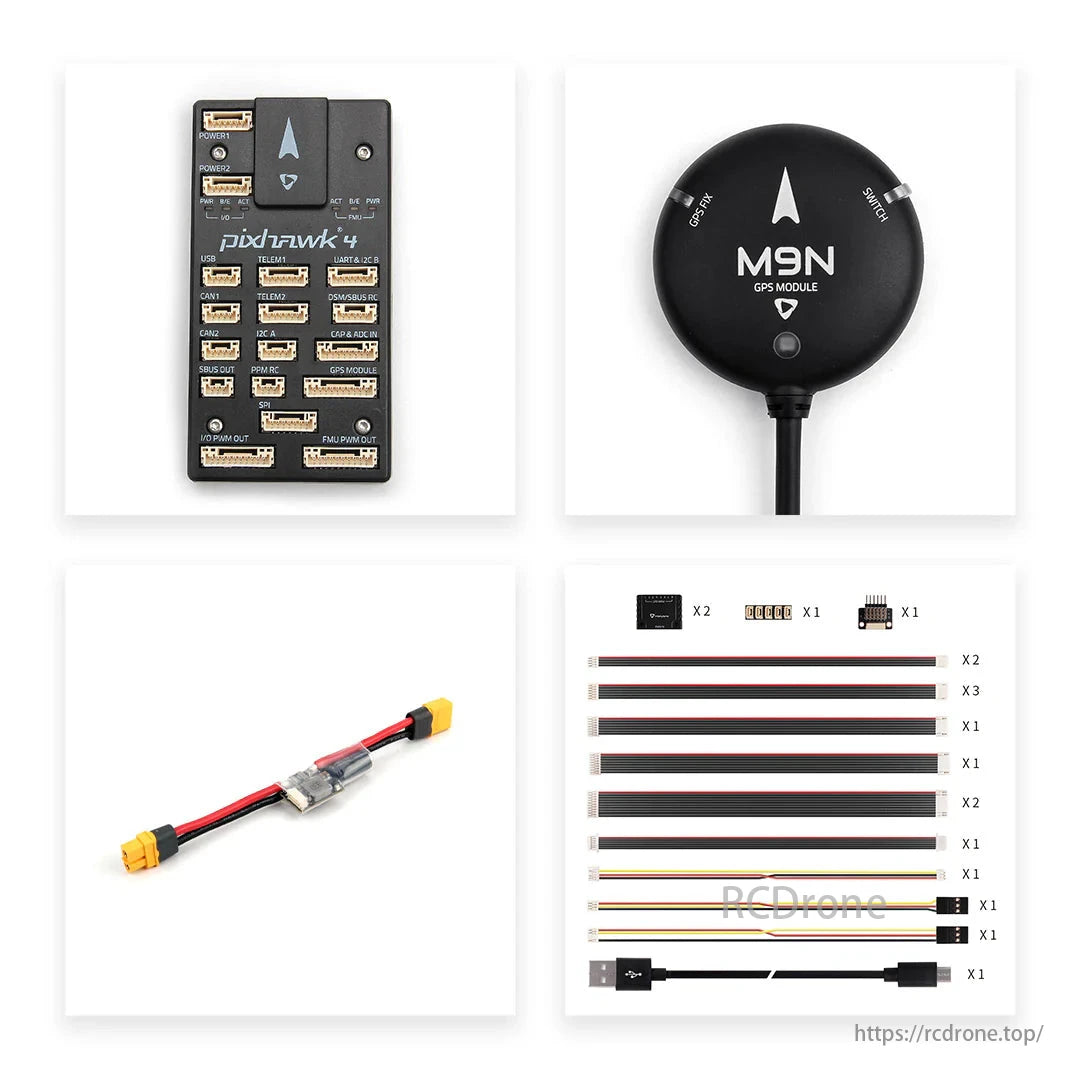
Pixhawk 4-Flugcontroller mit verschiedenen Anschlüssen, darunter USB, CAN, TELEM, UART, I2C, SBUS OUT, PPM RC, SPI und GPS-MODUL.

Pixhawk-Flugsteuerung, angetrieben durch das PX4-Autopilotsystem.

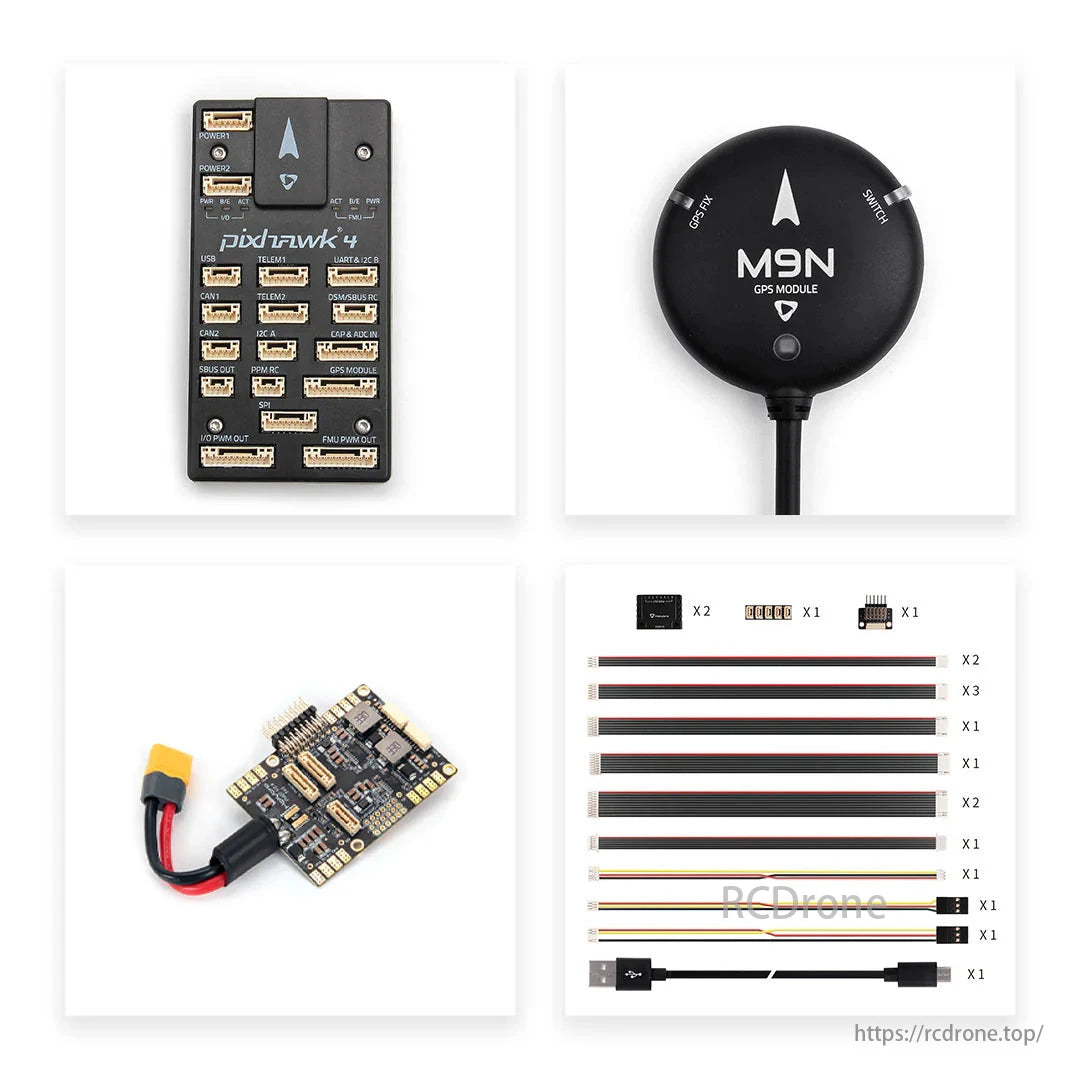
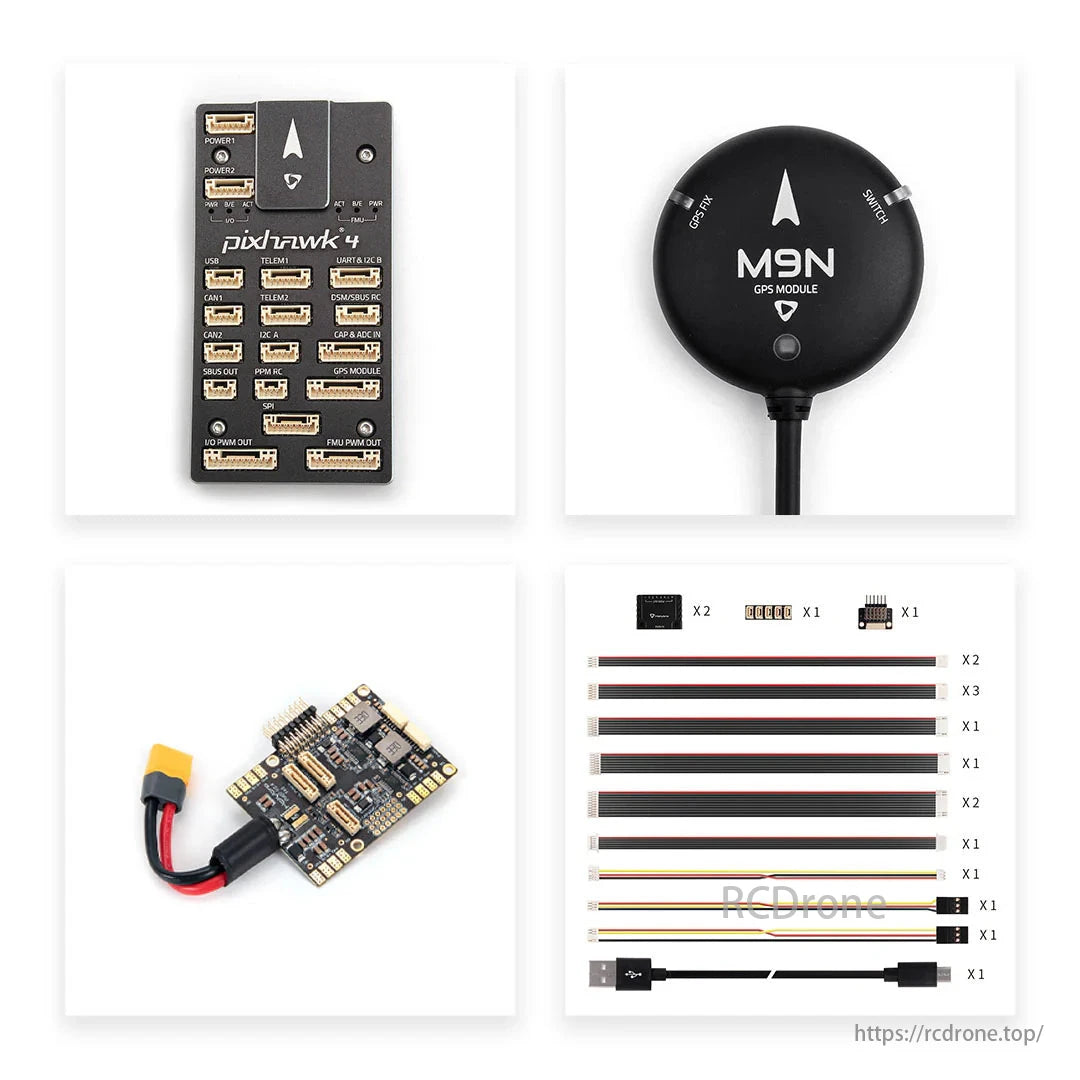
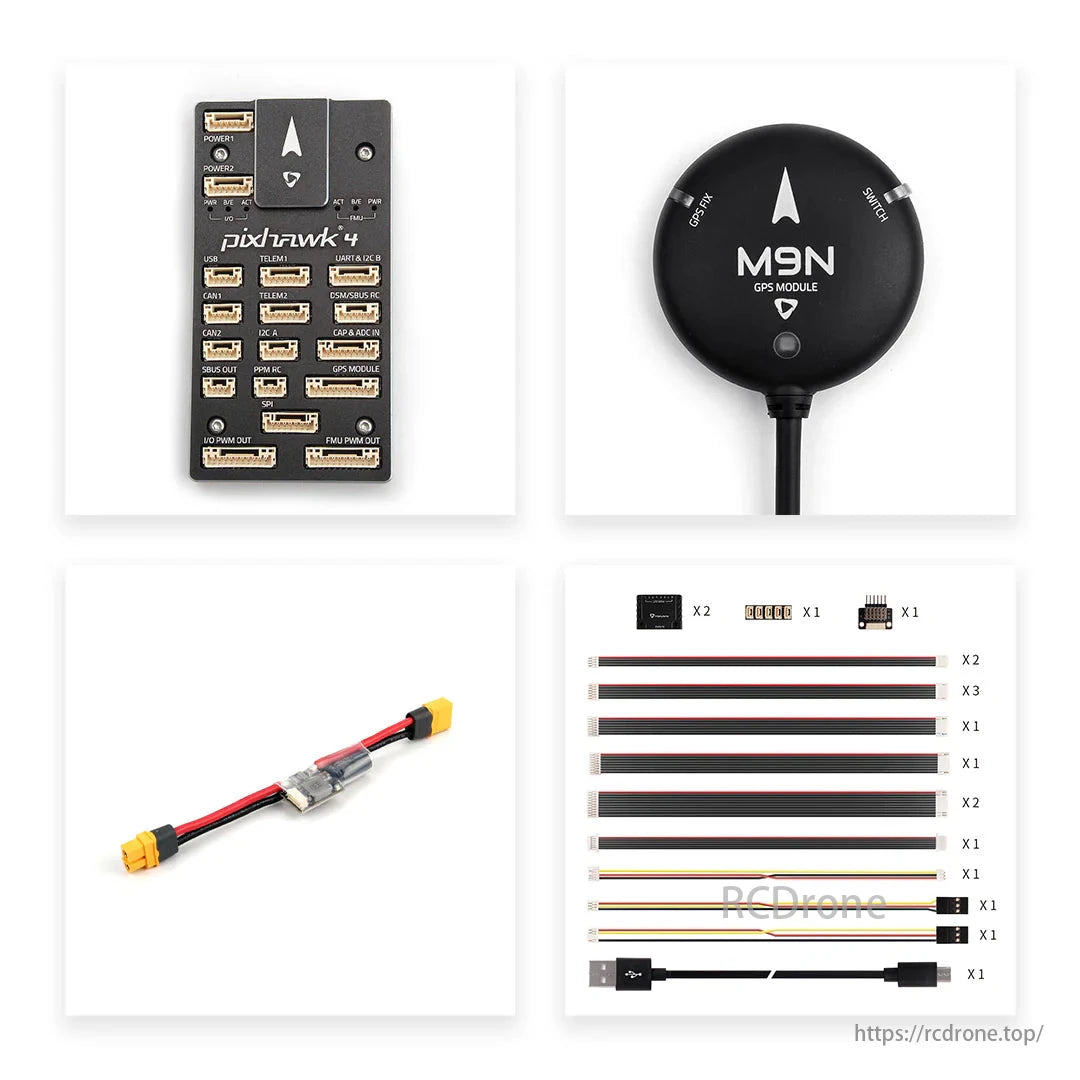
Pixhawk 4-Flugcontroller, M9N-GPS-Modul, Stromversorgungsmodul mit XT60-Anschluss und verschiedene Kabel für die Montage der RC-Drohne.

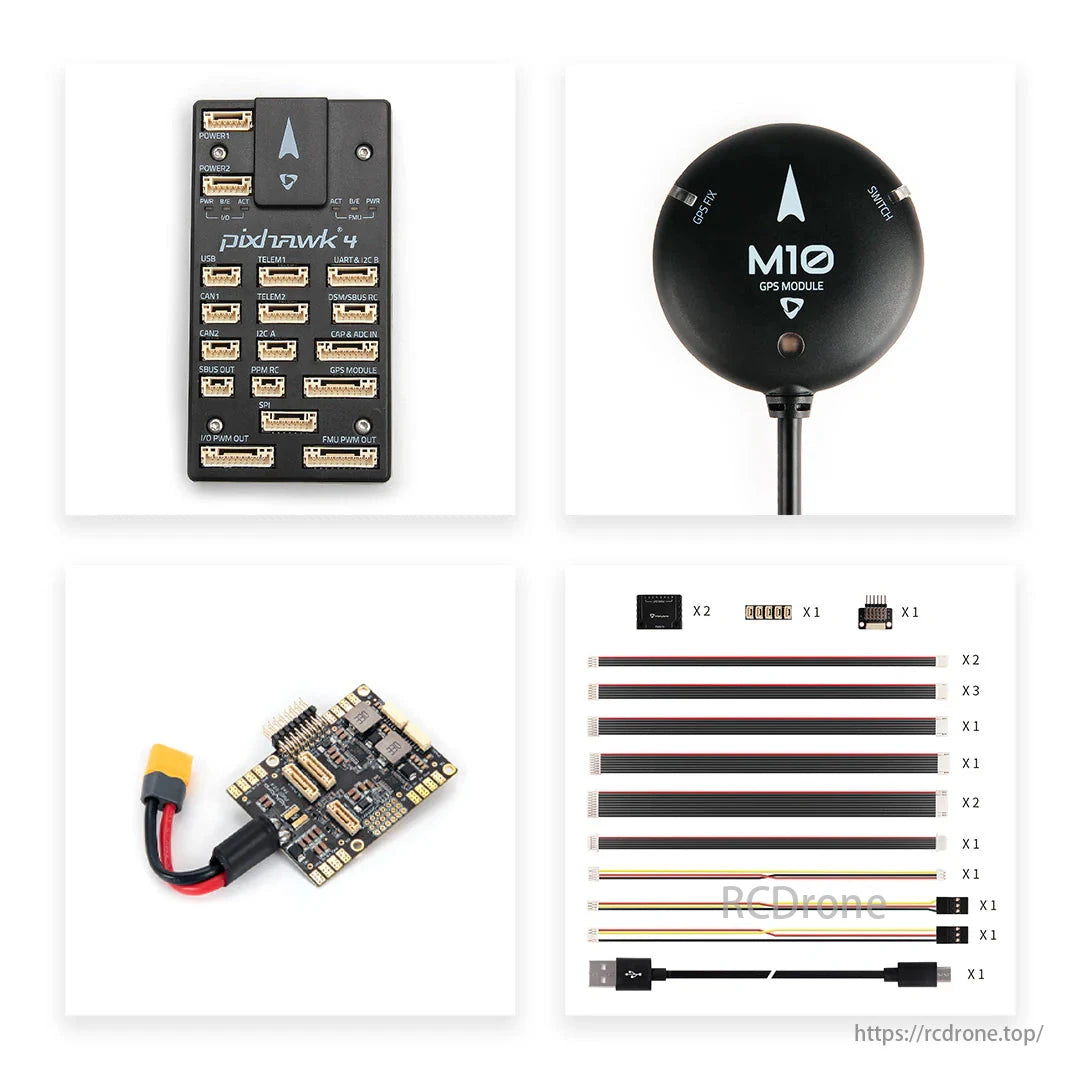
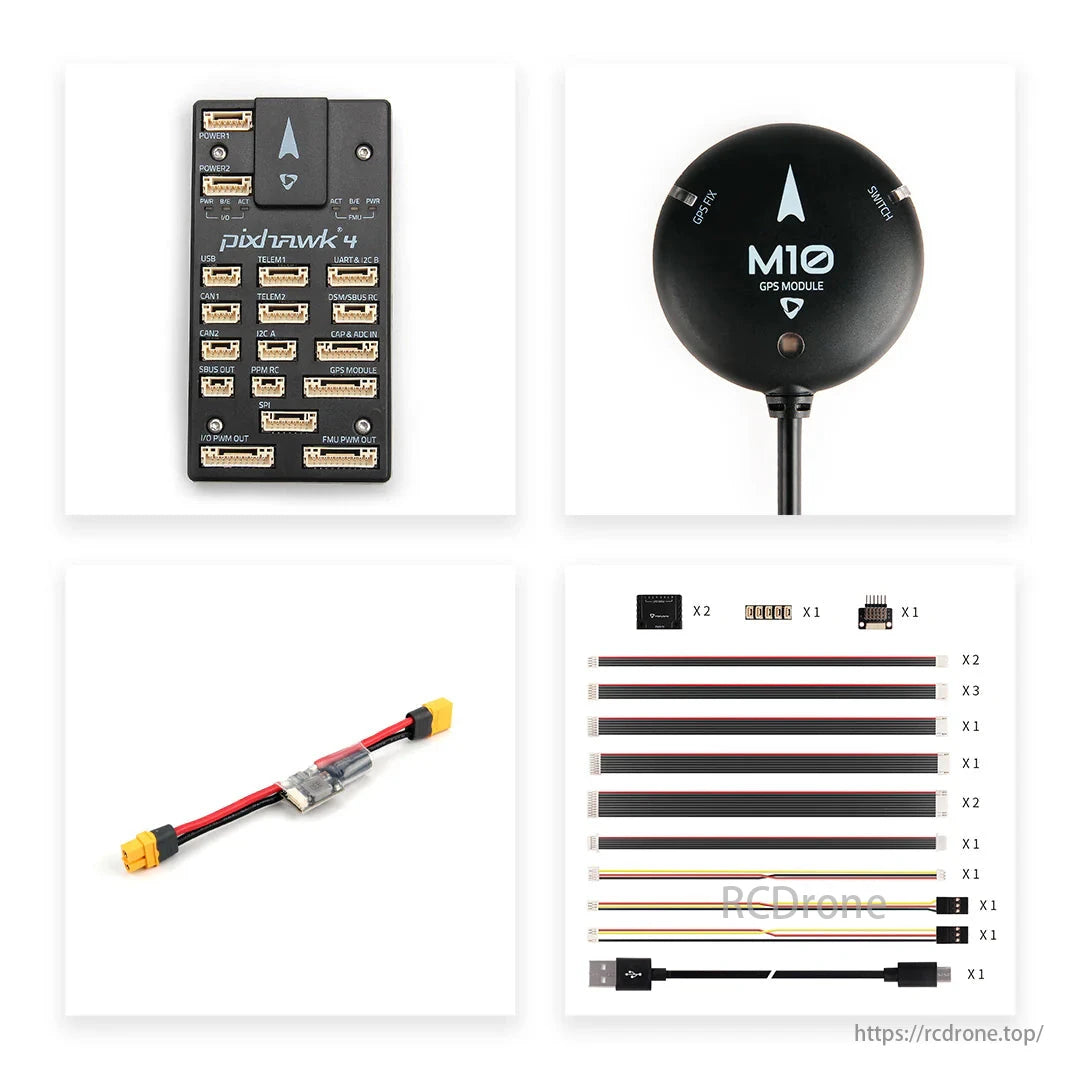
Pixhawk 4-Flugcontroller mit verschiedenen Anschlüssen, darunter USB, CAN und GPS-Modul. Enthält ein Stromversorgungsmodul und mehrere Kabel für Verbindungen.

Pixhawk 4-Flugcontroller, M9N-GPS-Modul, Stromversorgungsmodul mit XT60-Anschluss und verschiedene Kabel für die Verbindungen.