Holybro Pixhawk 5X Autopilot-Flugcontroller
Holybro Pixhawk 5X Autopilot-Flugcontroller
HolyBro
Verfügbarkeit für Abholungen konnte nicht geladen werden
Der Pixhawk® 5X ist das neueste Update der erfolgreichen Familie der Pixhawk®-Flugsteuerungen, basierend auf dem Pixhawk® FMUv5X Open Standard und dem Pixhawk® Autopilot Bus Standard. Es ist mit dem neuesten vorinstallierten PX4 Autopilot®, dreifacher Redundanz, temperaturgesteuertem, isoliertem Sensorbereich ausgestattet und bietet unglaubliche Leistung und Zuverlässigkeit.
Im Pixhawk® 5X finden Sie einen auf STMicroelectronics® basierenden STM32F7, gepaart mit Sensortechnologie von Bosch®, InvenSense®, was Ihnen Flexibilität und Zuverlässigkeit für die Steuerung jedes autonomen Fahrzeugs bietet und sowohl für akademische als auch für kommerzielle Anwendungen geeignet ist. Der F7-Mikrocontroller des Pixhawk® 5X verfügt über 2 MB Flash-Speicher und 512 KB RAM. Der PX4-Autopilot profitiert von der höheren Leistung und dem größeren RAM. Dank der verbesserten Verarbeitungsleistung können Entwickler ihre Entwicklungsarbeit produktiver und effizienter gestalten und komplexe Algorithmen und Modelle erstellen.
Der offene Standard FMUv5X umfasst leistungsstarke, geräuscharme IMUs an Bord, die für eine bessere Stabilisierung ausgelegt sind. Dreifach redundante IMU und doppelt redundantes Barometer auf separaten Bussen. Wenn der PX4-Autopilot einen Sensorfehler erkennt, wechselt das System nahtlos zu einem anderen, um die Zuverlässigkeit der Flugsteuerung aufrechtzuerhalten.
Ein unabhängiger LDO versorgt jeden Sensorsatz mit unabhängiger Leistungssteuerung. Eine neu entwickelte Schwingungsisolierung filtert hochfrequente Vibrationen heraus und reduziert das Rauschen, um genaue Messwerte zu gewährleisten und den Fahrzeugen so insgesamt bessere Flugleistungen zu ermöglichen. Der externe Sensorbus (SPI5) verfügt über zwei Chip-Select-Leitungen und datenbereite Signale für zusätzliche Sensoren und Nutzlasten mit SPI-Schnittstelle. Mit einem integrierten Microchip Ethernet PHY (LAN8742AI-CZ-TR) wird jetzt die Hochgeschwindigkeitskommunikation mit Missionscomputern über Ethernet unterstützt. Zwei Smart Battery Monitoring-Ports (SMBus), Unterstützung für das INA226 SMBus Power-Modul.
Der Pixhawk® 5X ist ideal für Entwickler in Forschungslabors von Unternehmen, Startups, Akademiker (Forschung, Professoren, Studenten) und kommerzielle Anwendungen. Der Pixhawk 5X ist kompatibel mit PX4 Autopilot und Ardupilot-Firmware.
Notiz:
- Der Pixhawk 5X benötigt das I2C-Protokoll für Spannungs- und Stromdaten vom Leistungsmodul wie PM02D, analoges Strommodul (PM02, PM06, PM07) sind nicht mit Pixhawk 5X kompatibel. Vergleichstabelle für Leistungsmodule
- Es wird standardmäßig mit der PX4-Firmware ausgeliefert. Benutzer können die Ardupilot-Firmware auch verwenden, indem sie die Firmware über Mission Planner oder QGroundControl flashen.
Wichtige Designpunkte
- Modularer Flugregler: getrenntes IMU, FMU und Basissystem, verbunden durch einen 100-poligen und einen 50-poligen Pixhawk® Autopilot-Bus-Anschluss, konzipiert für flexible und anpassbare Systeme
- Redundanz: 3x IMU-Sensoren und 2x Barometer-Sensoren auf separaten Bussen, die einen parallelen und kontinuierlichen Betrieb auch im Falle eines Hardwarefehlers ermöglichen
- Dreifache Redundanzdomänen: Vollständig isolierte Sensordomänen mit separaten Bussen und separater Leistungssteuerung
- Vibrationsisolationssystem zum Herausfiltern hochfrequenter Vibrationen und Reduzieren von Rauschen, um genaue Messwerte zu gewährleisten
- Ethernet-Schnittstelle für die schnelle Integration von Missionscomputern
- Automatische Sensorkalibrierung ohne Signal- und Temperaturschwankungen
- Die Temperatur der IMUs wird durch integrierte Heizwiderstände geregelt, was eine optimale Arbeitstemperatur der IMUs ermöglicht.
Technische Spezifikation
- FMU-Prozessor: STM32F765
- 32-Bit Arm® Cortex®-M7, 216 MHz, 2 MB Speicher, 512 KB RAM
- IO-Prozessor: STM32F100
- 32 Bit Arm® Cortex®-M3, 24 MHz, 8 KB SRAM
- Integrierte Sensoren
- Beschleunigung/Gyro: ICM-20649 (fest montiert)
- Beschleunigung/Gyro: ICM-42688P (weich montiert)
- Beschleunigung/Gyro: ICM-20602 oder BMI088 (Weich montiert)
- Magazin: BMM150
- Barometer: 2x BMP388
Elektrische Daten
- Nennspannung:
- Maximale Eingangsspannung: 6 V
- USB-Stromversorgungseingang: 4,75–5,25 V
- Servoschieneneingang: 0 ~ 36 V
Schnittstellen
- 16- PWM-Servoausgänge
- R/C-Eingang für Spektrum / DSM
- Dedizierter R/C-Eingang für PPM- und S.Bus-Eingang
- Dedizierter analoger/PWM-RSSI-Eingang und S.Bus-Ausgang
- 4 serielle Universalanschlüsse
- 3 mit Vollstromregelung
- 1 mit separater 1A Strombegrenzung
- 1 mit I2C und zusätzlicher GPIO-Leitung für externen NFC-Leser
- 2 GPS-Anschlüsse
- 1 vollwertiger GPS-Anschluss plus Sicherheitsschalter
- 1 einfacher GPS-Anschluss
- 1 I2C-Anschluss
- 1 Ethernet-Anschluss
- Transformatorlose Anwendungen
- 100 Mbit/s
- 1 SPI-Bus
- 2 Chip-Select-Leitungen
- 2 datenbereite Leitungen
- 1 SPI-SYNC-Leitung
- 1 SPI-Reset-Leitung
- 2 CAN-Busse für CAN-Peripherie
- CAN-Bus verfügt über individuelle Silent-Steuerungen oder ESC RX-MUX-Steuerung
- 2 Stromeingangsanschlüsse mit SMBus
- 1 AD- und IO-Anschluss
- 2 zusätzliche analoge Eingänge
- 1 PWM/Capture-Eingang
- 2 dedizierte Debug- und GPIO-Leitungen
Mechanische Daten
- Maße
- Flugsteuerungsmodul: 38,8 x 31,8 x 14,6 mm
- Mini-Fußleiste: 43,4 x 72,8 x 14,2 mm
- Standard-Baseboard v1: 52,4 x 103,4 x 16,7 mm
- Standard-Basisboard v2A: 40,2 x 92,3 x 18,4 mm
- Standard-Baseboard v2B: 40,2 x 98,3 x 16,9 mm
- Gewicht
- Flugsteuerungsmodul: 23 g
- Mini-Fußleiste: 26.8 g
- Standard-Baseboard v1: 51 g
- Standard-Baseboard v2A: 58 g
- Standard-Baseboard v2B: 58 g
SKU 11045 beinhaltet:
- Pixhawk 5X Flugsteuerungsmodul
SKU 20307/SKU 20320/SKU20310 beinhaltet:
- Pixhawk 6X Flugsteuerungsmodul
- Standard-Baseboard v2A/v2B oder Mini-Baseboard
- PM02D HV-Leistungsmodul
- Kabelsatz
- Pixhawk 6X Flugsteuerungsmodul
- Standard-Baseboard v2A/v2B oder Mini-Baseboard
- PM02D HV-Leistungsmodul
- Kabelsatz
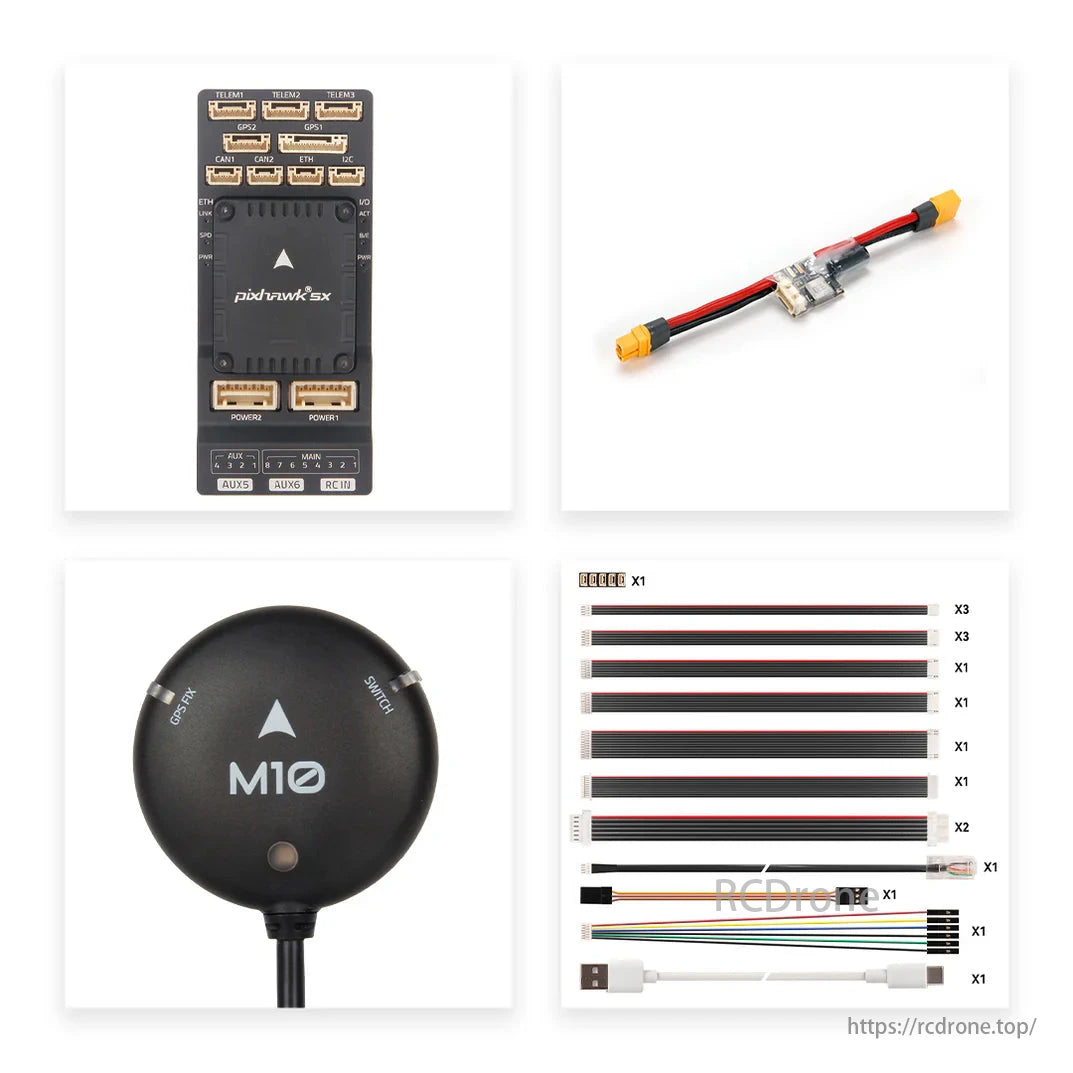
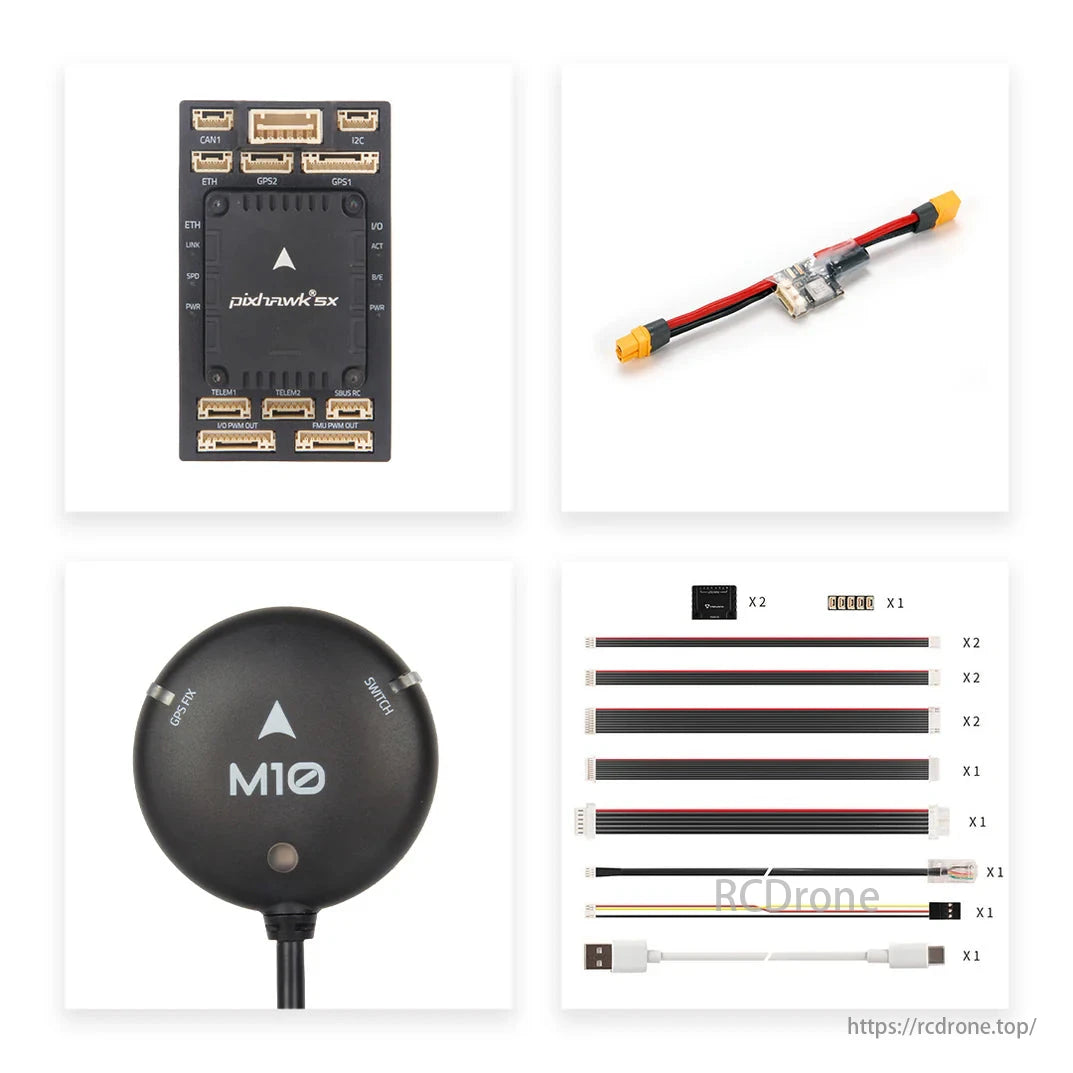
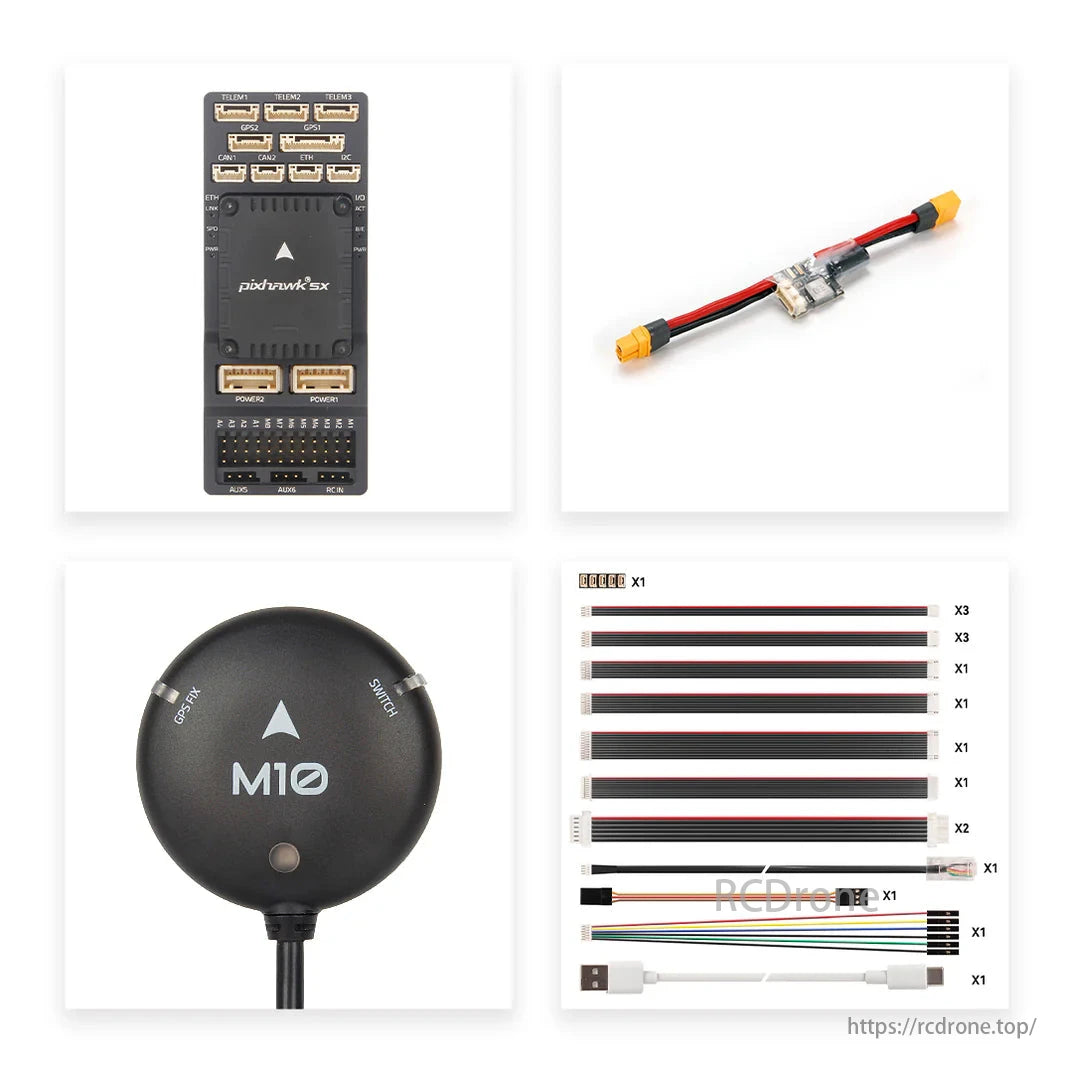
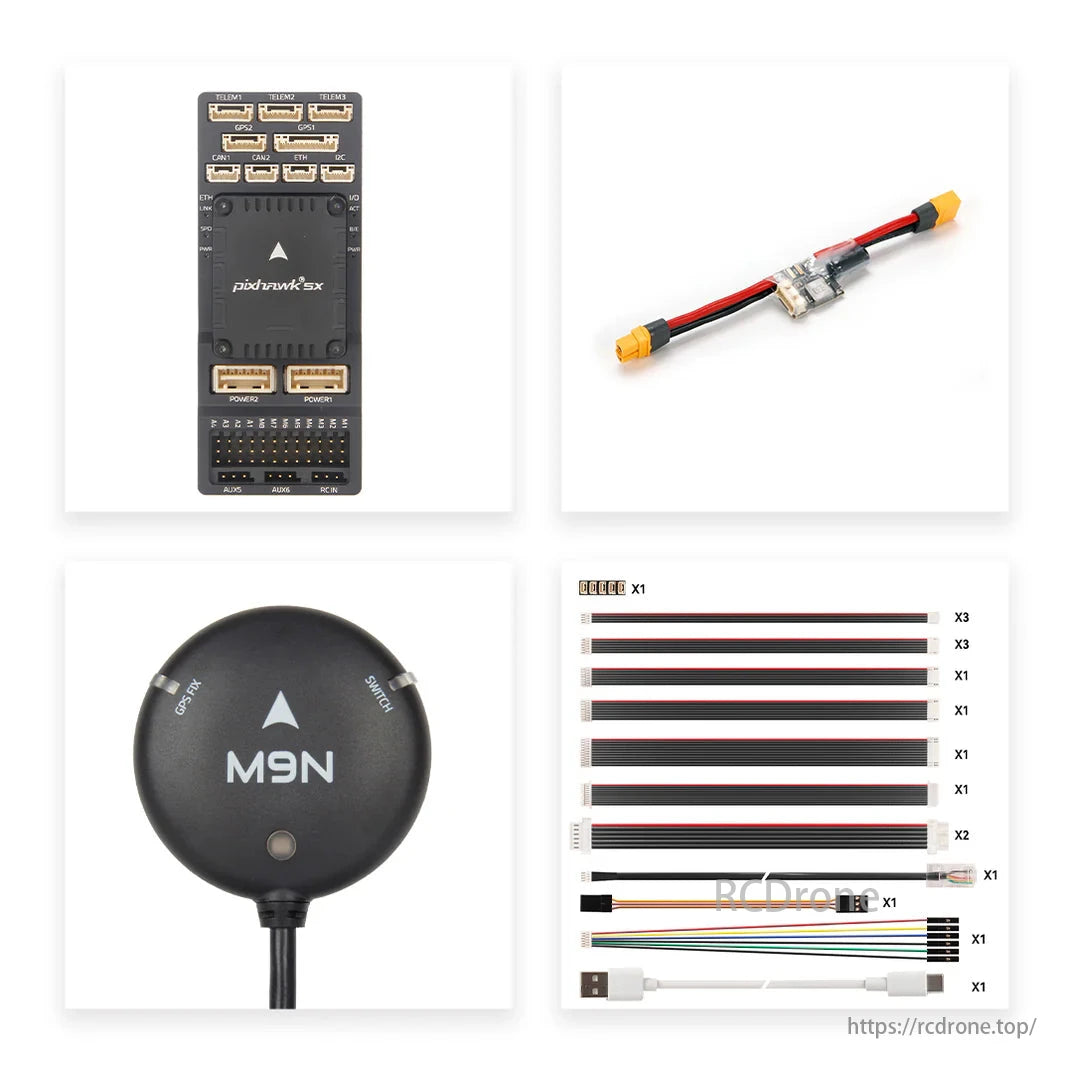
- M9N/M10 GPS
Pixhawk mini, Pixhawk Baseboard v1 und zwei Varianten von Pixhawk Baseboard v2 (v2A und v2B) werden mit Abmessungen angezeigt. Der Mini ist 43,4 x 72,8 mm groß, v1 ist 52 x 101,90 mm groß, v2A ist 40,2 x 92,3 mm groß und v2B ist 40,2 x 98,3 mm groß.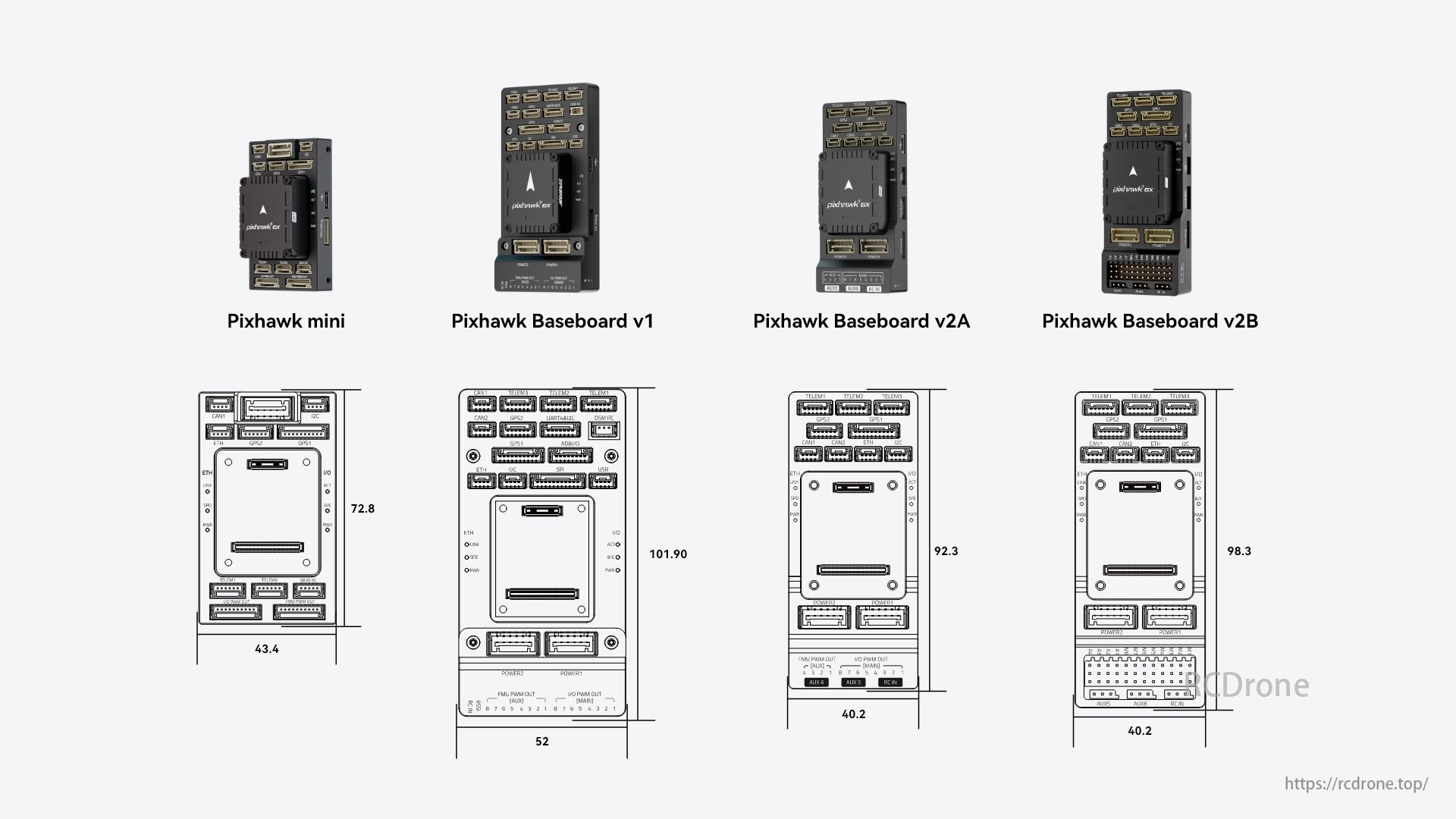
Verdrahtungsbeispielhandbuch

Das Diagramm des Holybro Pixhawk 5X umfasst primäres und sekundäres GPS, UART4- und I2C-Anschlüsse, CAN1 und 2, DSM RC-Empfänger, Telemetrieradio, HD-FPV-IP-Kamera, Batterie, Strommodul, ESCs und eine Stromverteilungsplatine.
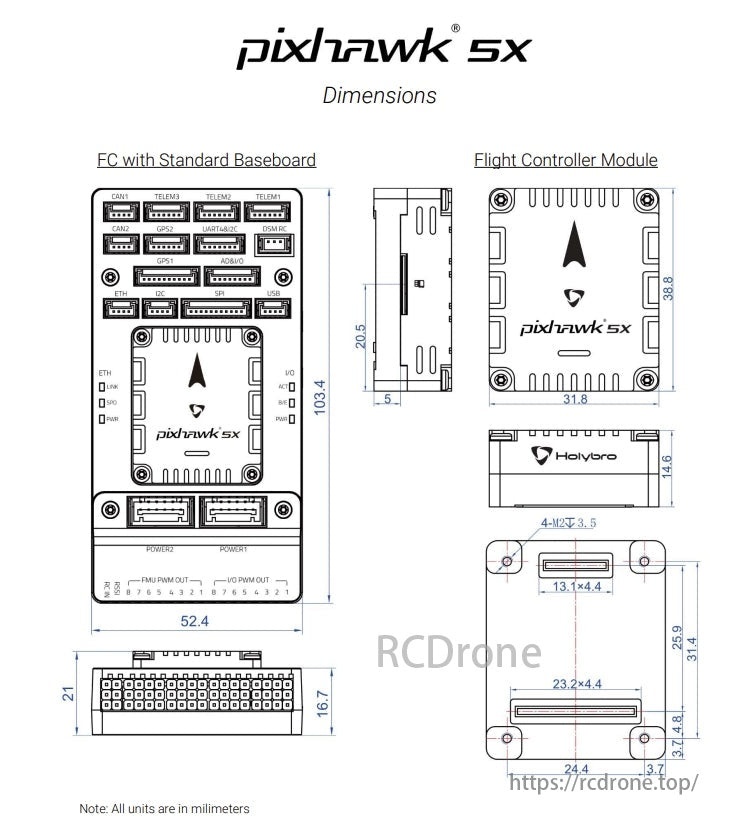
Die Abmessungen des Pixhawk SX umfassen ein Flugsteuerungsmodul und einen FC mit Standard-Grundplatte. Das Modul misst 31,8 x 38,8 mm, während die Grundplatte 103,4 x 52,4 mm misst. Alle Einheiten sind in Millimetern angegeben.

Standardabmessungen der Basisplatine: 103,4 x 58 x 10,7 mm, mit verschiedenen Anschlüssen und Steckern, einschließlich USB, Ethernet und Stromeingängen.


Pixhawk 5X-Flugcontroller mit den Anschlüssen TELEM1-3, GPS1-2, CAN1-2, ETH, I2C, POWER1-2, AUX5-6 und RC IN.
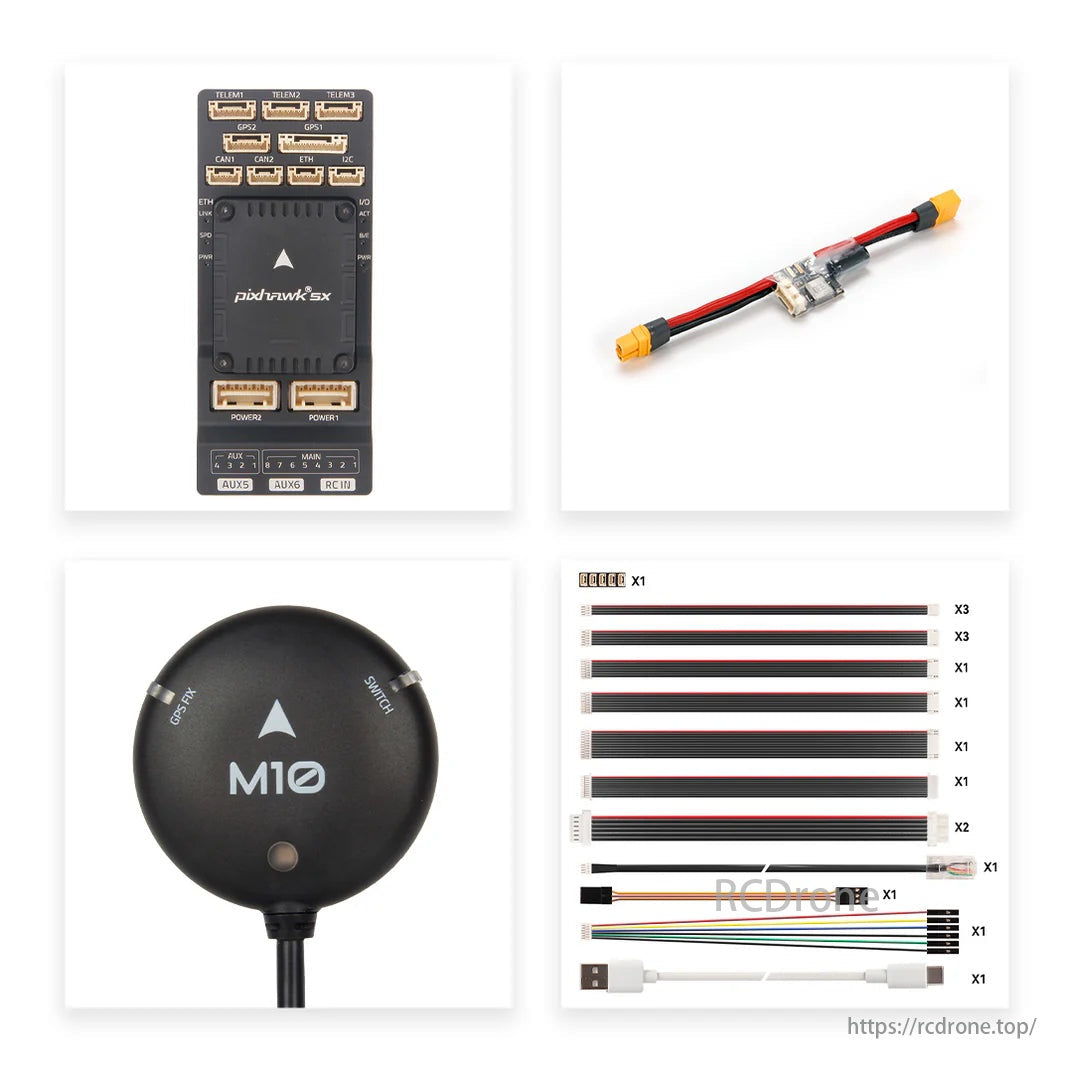
Pixhawk 5X-Flugcontroller, M10-GPS-Modul, Stromversorgungsmodul und verschiedene Kabel zur Drohnenmontage.