Holybro Pixhawk 6X (ICM-45686) Flugcontroller – Dreifach redundantes IMU, STM32H753, Ethernet, PX4 & ArduPilot kompatibel
Holybro Pixhawk 6X (ICM-45686) Flugcontroller – Dreifach redundantes IMU, STM32H753, Ethernet, PX4 & ArduPilot kompatibel
HolyBro
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der Holybro Pixhawk 6X (ICM-45686) ist ein hochleistungsfähiger, modularer Autopilot-Flugcontroller, der für anspruchsvolle industrielle und kommerzielle Drohnenanwendungen entwickelt wurde. Mit dreifach redundanten ICM-45686 IMUs ausgestattet, die BalancedGyro™ Technologie, duale Barometer und einen STM32H753 Prozessor mit einer Taktfrequenz von 480 MHz bieten, liefert der Pixhawk 6X unvergleichliche Zuverlässigkeit, Echtzeitleistung und Flexibilität. Seine modulare Architektur, fortschrittliche Vibrationsisolierung und Ethernet-Schnittstelle machen ihn ideal für UAV-Systeme, die robuste Steuerung, Präzision und Missionsanpassungsfähigkeit erfordern.
Hauptmerkmale
-
Dreifache IMU-Redundanz: 3x ICM-45686 IMUs (±32g) mit BalancedGyro™-Technologie für fehlertolerante inertiale Navigation
-
Duale Barometer: ICP20100 und BMP388 für verbesserte Höhenmessgenauigkeit
-
Hochgeschwindigkeitsprozessor: STM32H753 Cortex-M7, 480MHz, mit 2MB Flash & 1MB RAM
-
Modulares Design: Trennt FMU, IMU und Basisplatine, verbunden über 100-poligen & 50-poligen Pixhawk®-Bus
-
Temperaturgeregelte IMU-Platine: Gewährleistet optimale Sensorleistung über Temperaturbereiche
-
Ethernet-Integration: Unterstützt Hochgeschwindigkeitskommunikation mit Missionscomputern
-
Unterstützung für digitales Strommodul: Liefert genauere Spannungs- und Strommessungen
Fortgeschrittenes Isolationssystem: Langlebiges, maßgeschneidertes Material bietet eine hohe Spektrums-Vibrationsdämpfung
-
Firmware-Kompatibilität: Wird mit PX4 (v1.14.3+), unterstützt ArduPilot (v4.5.0+)
Technische Daten
Prozessoren & Sensoren
| Komponente | Details |
|---|---|
| FMU-Prozessor | STM32H753, ARM Cortex-M7, 480MHz, 2MB Flash, 1MB RAM |
| IO-Prozessor | STM32F103, ARM Cortex-M3, 72MHz |
| IMU-Sensoren | 3x ICM-45686 (BalancedGyro™) |
| Barometer | ICP20100 & BMP388 |
| Magnetometer | BMM150 |
| Sichere Komponente | NXP SE050 Plug & Trust |
Elektrische Parameter
| Parameter | Value |
|---|---|
| Maximaler Eingangsspannung | 6V |
| USB-Stromversorgung Eingabe | 4.75~5.25V |
| Servo-Schienen-Spannung | 0~36V |
| Telem1 & GPS2 Strombegrenzung | 1.5A kombiniert |
| Strombegrenzung anderer Ports | 1.5A kombiniert |
| PWM-Signalspannung | Standard 3.3V (umschaltbar auf 5V über Widerstand) |
| Betriebstemperatur | -25°C bis +85°C |
Mechanische Abmessungen & Gewicht
| Komponente | Abmessungen (mm) | Gewicht (g) |
|---|---|---|
| Flugcontroller | 38.8 x 31.8 x 16.8 | 31.3g |
| Standard-Basisplatte | 52.4 x 102 x 16.7 | 72.5g |
| Mini-Basisplatte | 43,4 x 72,8 x 14,2 | 26,5g |
Firmware-Kompatibilität
-
PX4: Vollständig unterstützt ab Version 1.14.3 und höher
-
ArduPilot: Vollständig unterstützt ab Version 4.5.0 und höher
-
Firmware-Flashen unterstützt über Mission Planner oder QGroundControl
Anwendungen
Ideal für die Integration in:
-
Industrielle Drohnen
-
Kommerzielle UAV-Systeme
-
VTOL-Flugzeuge
-
Akademische Forschungsplattformen
-
Multi-Sensor- und Hochzuverlässigkeitsmissionen
Details

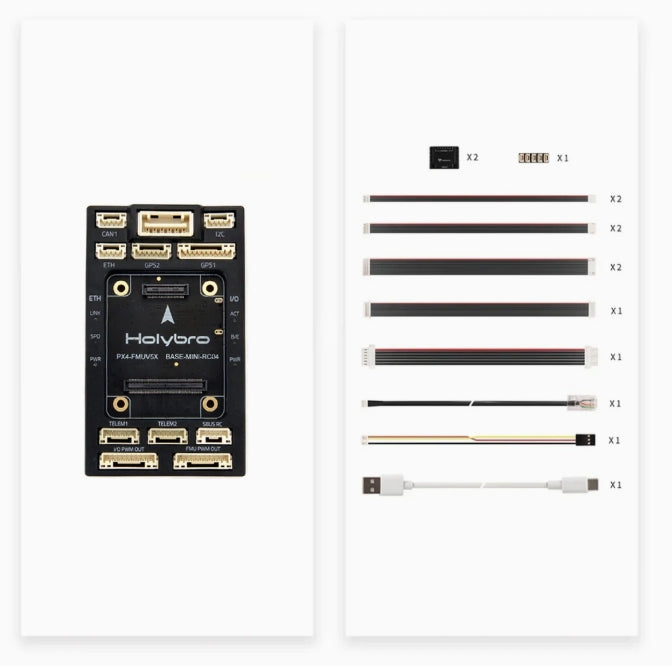
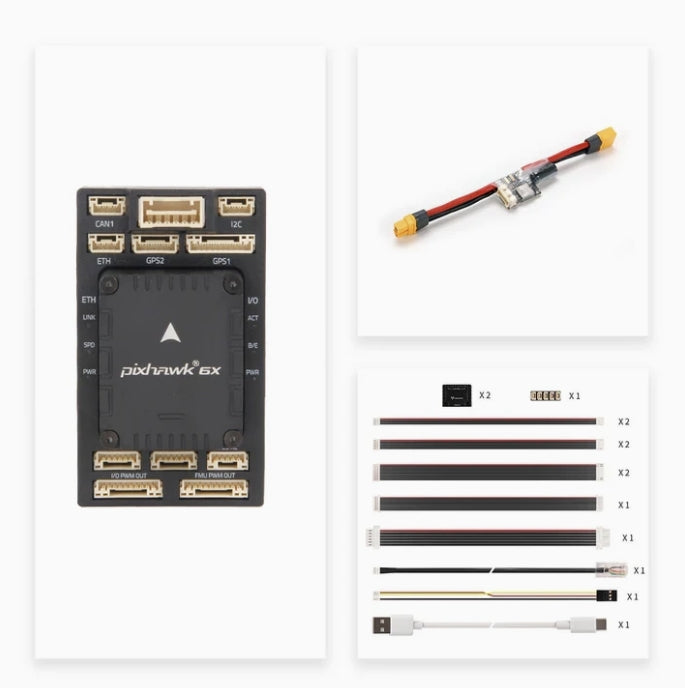
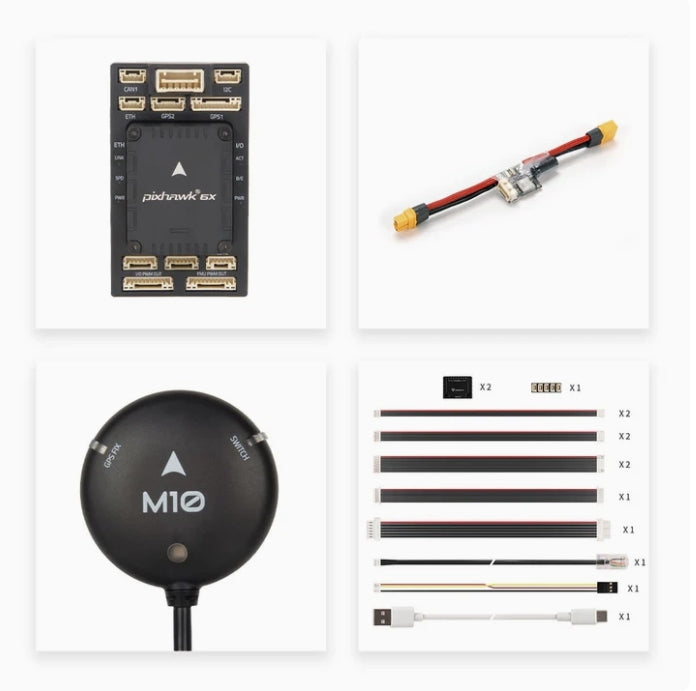
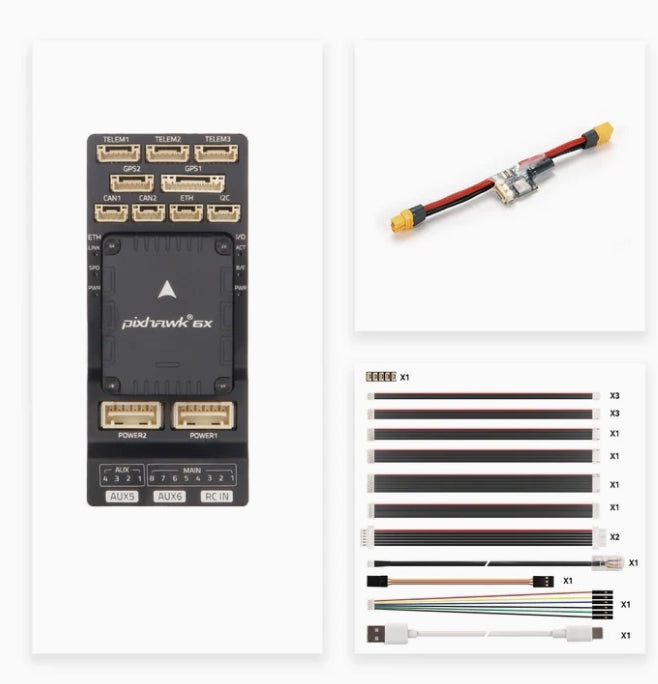
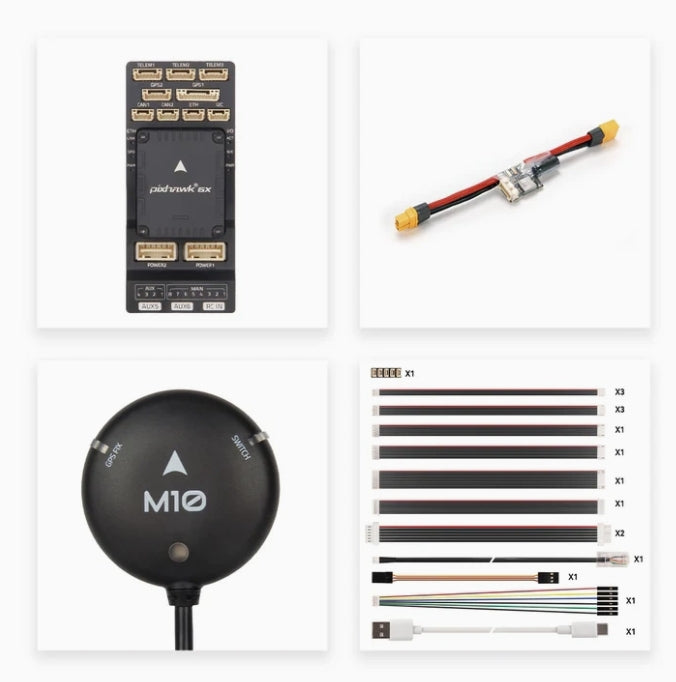
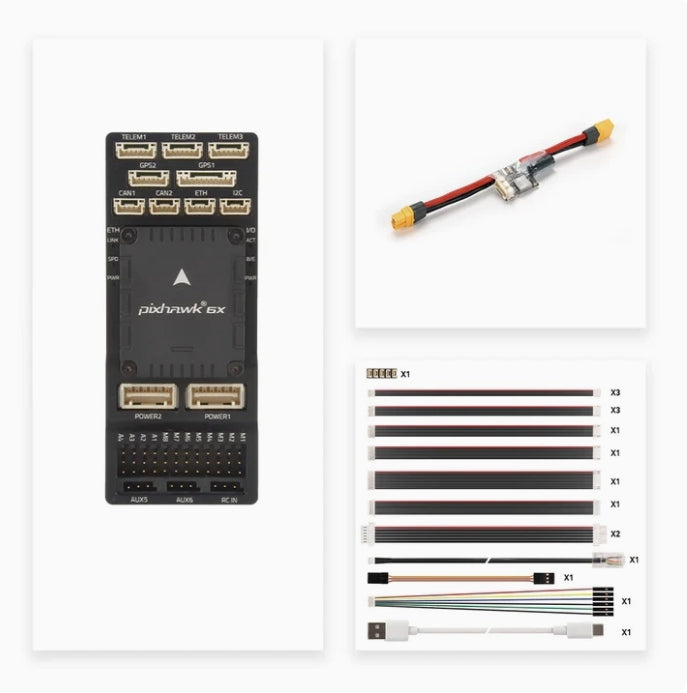
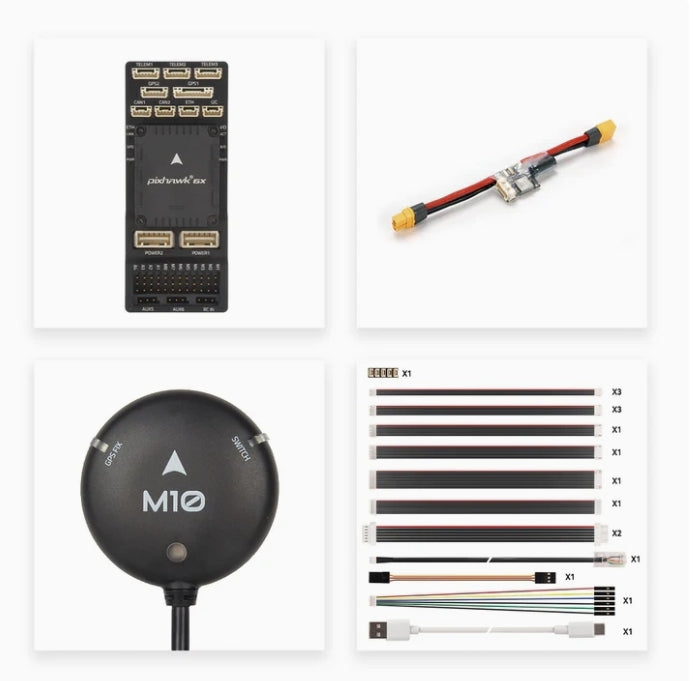
Pixhawk 6X bietet ein schlankeres Design mit zwei Modellen. Es verfügt über einen verbesserten Pinheader für bessere Konnektivität und Leistung, was es ideal für fortgeschrittene Anwendungen macht. Wählen Sie das richtige Modell für Ihre Bedürfnisse.
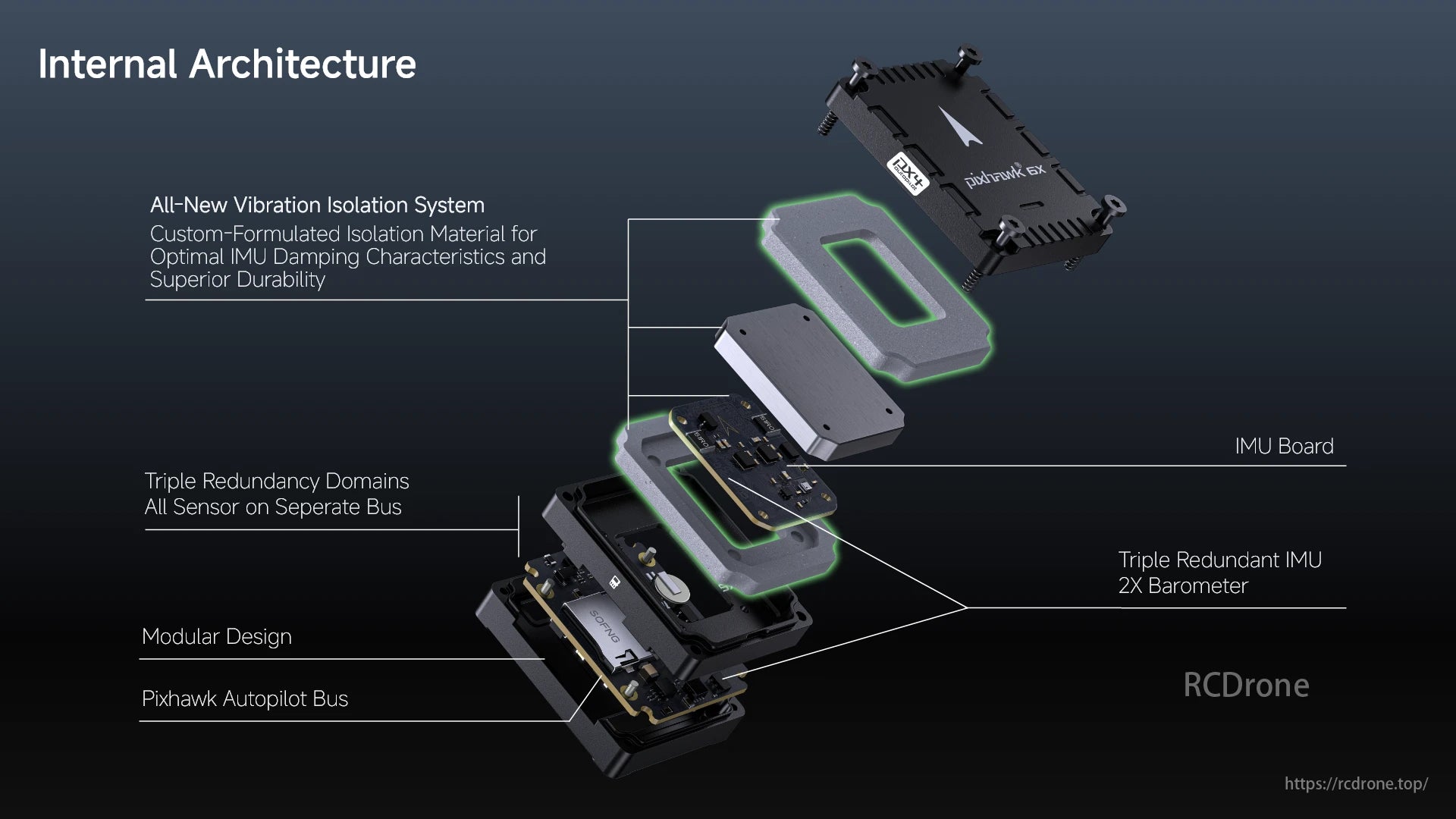
Der Holybro Pixhawk 6X bietet Vibrationsisolierung, dreifache Redundanz, modulares Design, Autopilot-Bus, IMU-Board und 2x Barometer für fortschrittliche Leistung.
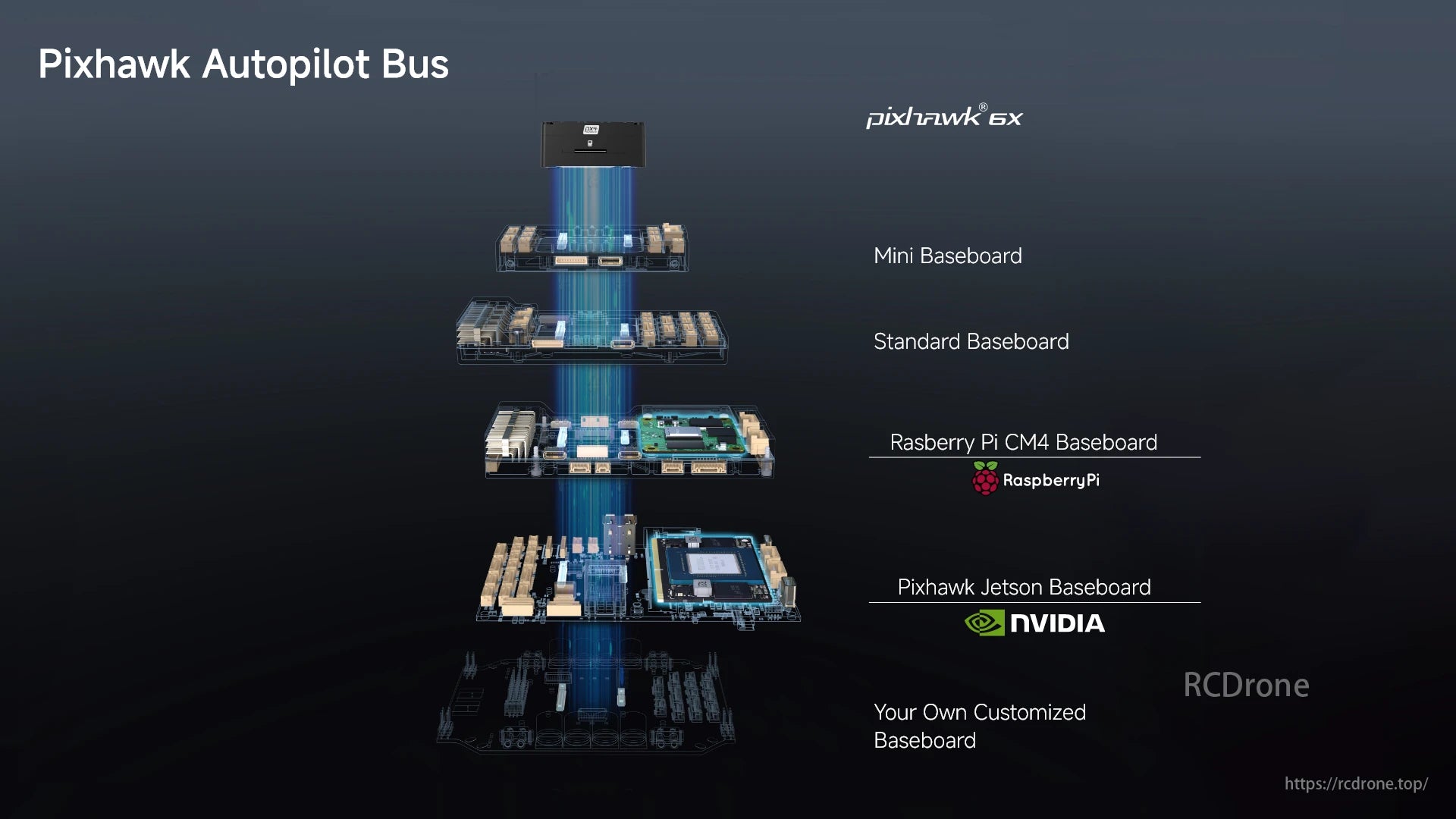
Pixhawk Autopilot-Bus umfasst Pixhawk 6X, Mini Basisplatte, Standard Basisplatte, Raspberry Pi CM4 Basisplatte, Jetson Basisplatte und benutzerdefinierte Optionen.

Temperaturkompensationswiderstände, redundante IMU & Barometer, verschiedene Sensortechnologien und Isoliermaterial gewährleisten Genauigkeit.

Der Pixhawk Autopilot-Bus, STM H753 32-Bit Prozessor (480 MHz), Invensense ICM45686 IMU mit BalancedGyro-Technologie und NXP EdgeLock SE050 Secure Element sind in das FMU-Board integriert.
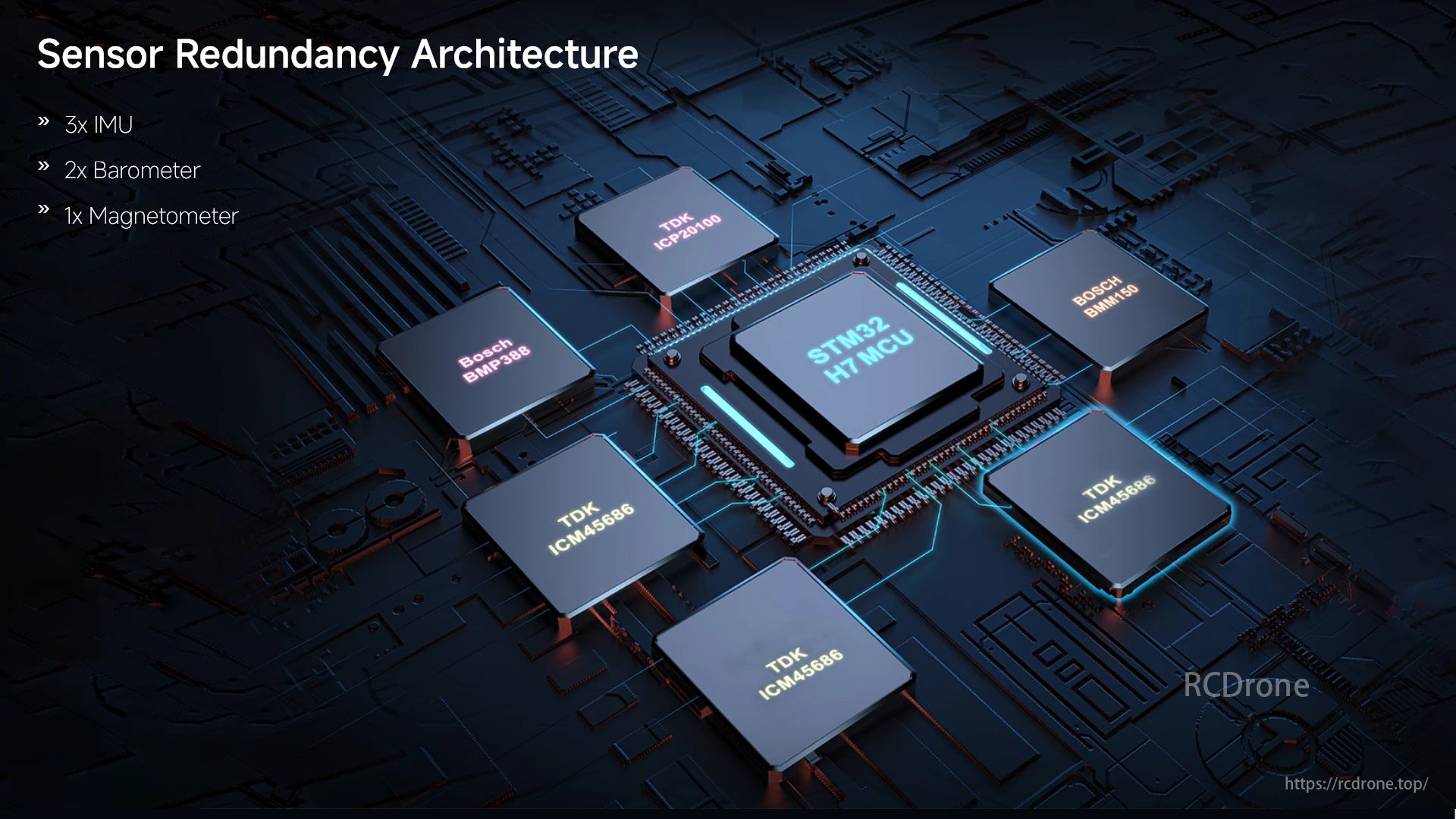
Sensor-Redundanzarchitektur mit 3x IMU, 2x Barometer und 1x Magnetometer. Funktionen STM32 H7 MCU, TDK ICM-45686, Bosch BMP388 und BMM50 Sensoren für verbesserte Leistung.
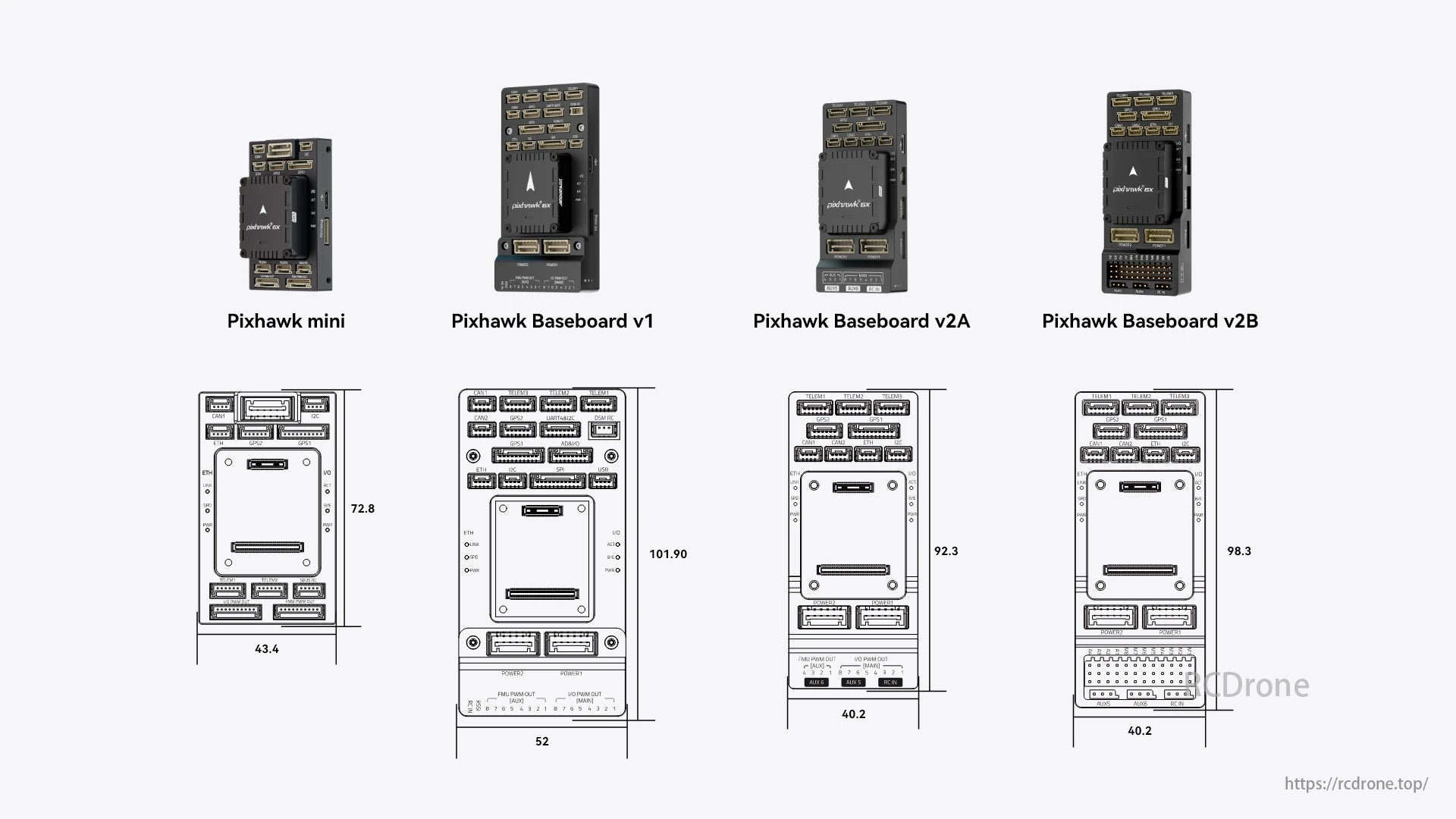
Pixhawk mini, Baseboard v1, v2A und v2B Flugsteuerungen mit Abmessungen: 43,4x72,8, 52x101,90, 40,2x92,3 und 40,2x98,3 jeweils. Verschiedene Ports und Anschlüsse sind an jedem Modell sichtbar.
Related Collections