Holybro Pixhawk 6X Pro Autopilot-Flugcontroller
Holybro Pixhawk 6X Pro Autopilot-Flugcontroller
HolyBro
Verfügbarkeit für Abholungen konnte nicht geladen werden
Wichtiger Designpunkt
- Leistungsstarke ADIS16470 Industrie-IMU mit hohem Beschleunigungsdynamikbereich (±40 g), perfekt für Präzise Bewegungserkennung in anspruchsvollen UAV-Anwendungen
- Völlig neues, fortschrittliches und langlebiges Schwingungsisolationsmaterial mit Resonanzfrequenz im höheren Spektrum, ideal für industrielle und kommerzielle Drohnenanwendungen
- Dreifach redundante IMU und doppelt redundantes Barometer auf separaten Bussen
- Leistungsstarker STM32H753-Prozessor
- Modularer Flugregler: getrenntes IMU, FMU und Basissystem
- Sicherheitsorientiertes Design integriert Sensoren verschiedener Hersteller und Modellreihen
- Unabhängiger LDO versorgt jeden Sensor mit unabhängiger Leistungssteuerung.
- Ethernet-Schnittstelle für die Hochgeschwindigkeitsintegration von Missionscomputern. Transformatorlos kann durch 50 Ohm Abschlusswiderstände am Zielgerät erreicht werden (AN2190 50 Ohm Abschluss).
- Temperaturgesteuerte IMU-Platine, die eine optimale Arbeitstemperatur der IMUs ermöglicht
- Hardwareseitig umschaltbarer 3,3-V- oder 5-V-Signalmodus (erfordert Modifikation der Basisplatine)
Notiz:
- Für die Funktion dieses Produkts sind ein FC-Modul + eine Basisplatine erforderlich. Ein FC-Modul oder ein Baseboard allein funktionieren nicht.
Spezifikation
Prozessoren & Sensoren
- FMU-Prozessor: STM32H753
- 32 Bit Arm® Cortex®-M7, 480 MHz, 2 MB Flash-Speicher, 1 MB RAM
- IO-Prozessor: STM32F103
- 32 Bit Arm® Cortex®-M3, 72 MHz, 64 KB SRAM
- Integrierte Sensoren
- Beschleunigung/Gyro: ADIS16470
- ±40g, Schwingungsisolierte, industrielle IMU
- Beschleunigung/Gyro: IIM-42652
- ±16g, Schwingungsisolierte, industrielle IMU
- Beschleunigung/Gyro: ICM-45686 mit BalancedGyro™-Technologie
- ±32 g, fest montiert
- Barometer: ICP20100
- Barometer: BMP388
- Magazin: BMM150
- Beschleunigung/Gyro: ADIS16470
- NXP EdgeLock SE050 Plug & Trust-Hardware-Sicherheitselement
Elektrische Daten
- Nennspannung:
- Maximale Eingangsspannung: 6 V
- USB-Stromversorgungseingang: 4,75–5,25 V
- Servoschieneneingang: 0 ~ 36 V
- Aktuelle Bewertungen:
- Telem1 Ausgangsstrombegrenzer: 1,5 A
- Kombinierter Ausgangsstrombegrenzer aller anderen Anschlüsse: 1,5 A
- Betriebstemperatur: -25-85°C
Mechanische Daten
- Maße
- Flugsteuerungsmodul: 38,8 x 31,8 x 30,1 mm
- Standard-Grundplatte: 52,4 x 102 x 16,7 mm (Aluminium)
- Mini-Baseboard: 43,4 x 72,8 x 14,2 mm
- Gewicht
- Flugsteuerungsmodul: 50 g
- Standard-Grundplatte: 72,5 g (Aluminium)
- Mini-Fußleiste: 26.5 g
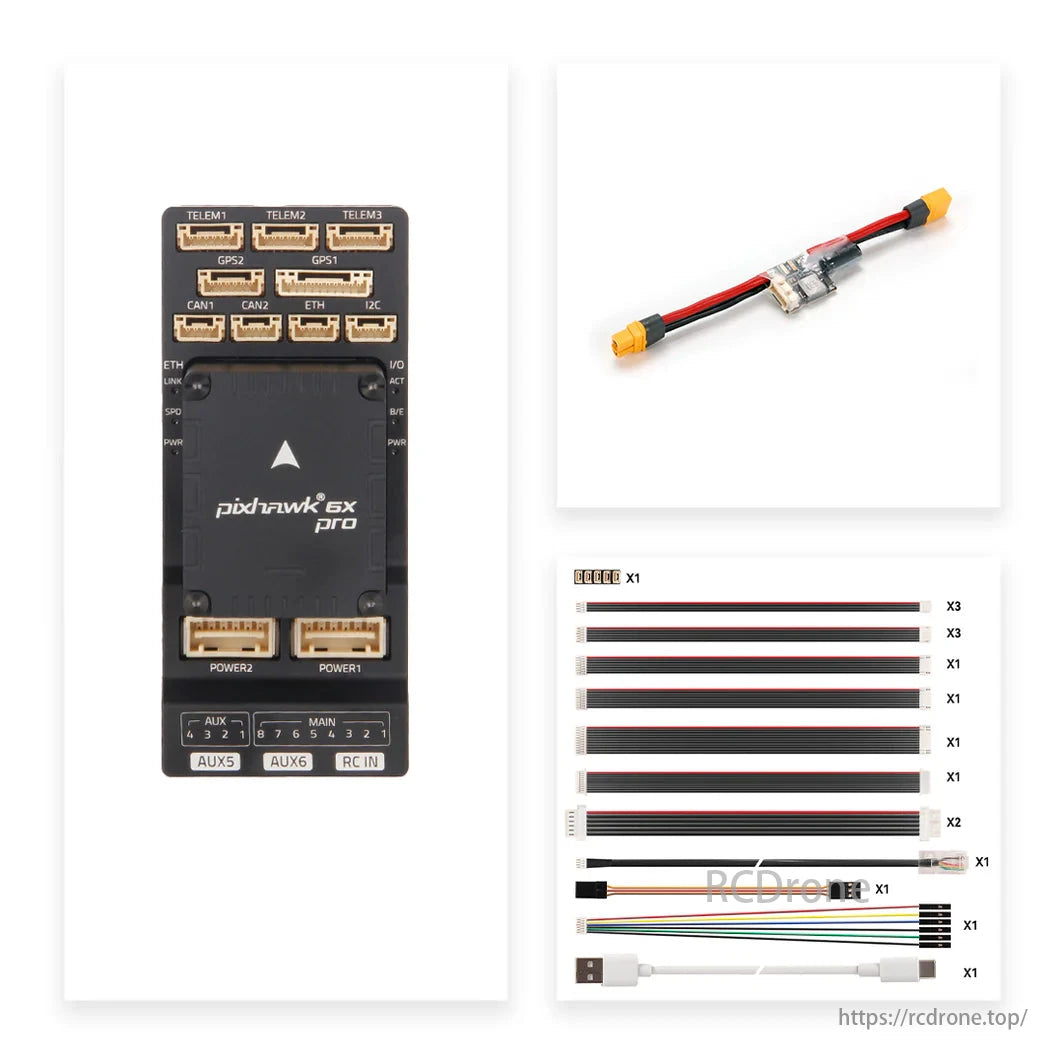
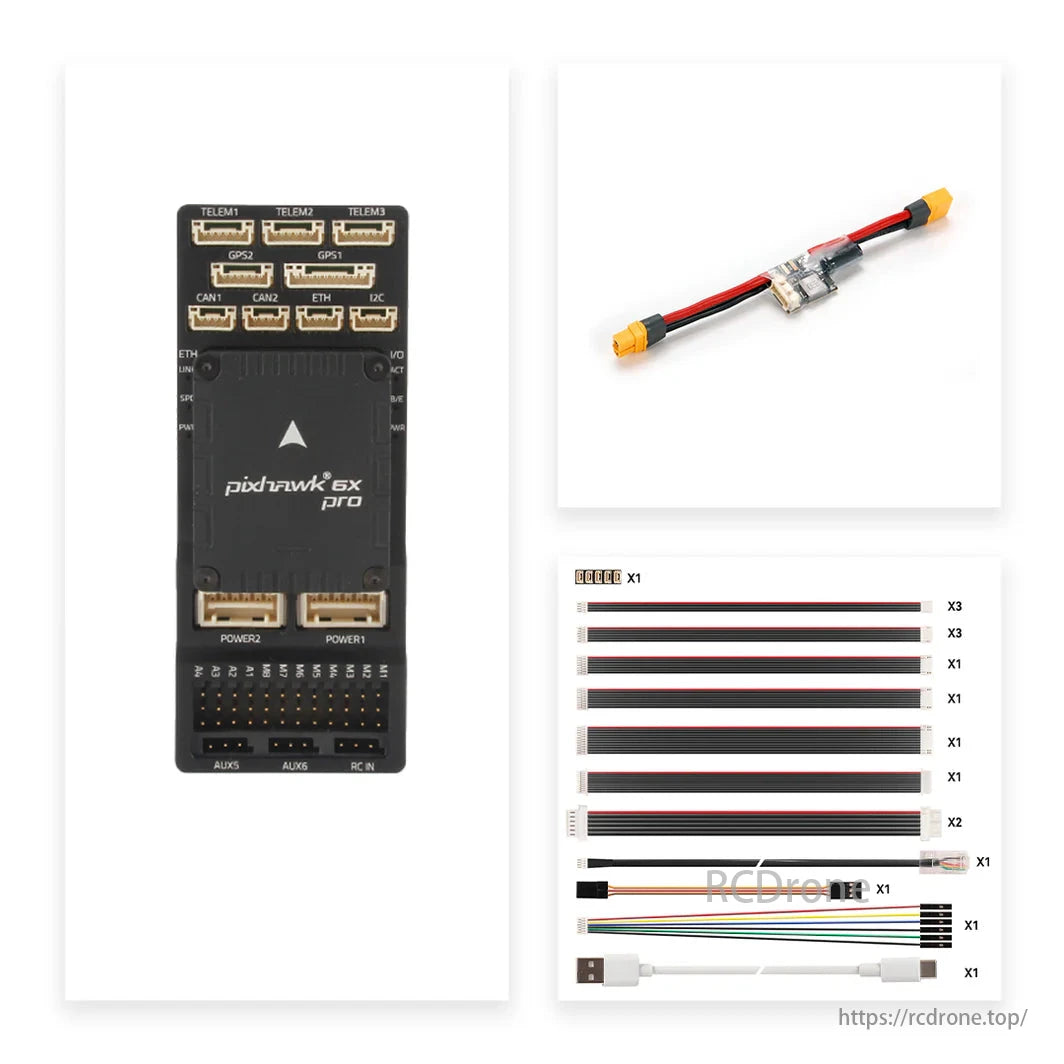
Paket beinhaltet
Nur das FC-Modul beinhaltet:
- Pixhawk 6X Pro Flugsteuerungsmodul
- Optionaler IMU-Dämpfungsersatz (weicher als vorinstalliert)
Das Standardset V2A/V2B/Mini umfasst:
- Pixhawk 6X Pro Flugsteuerungsmodul
- Pixhawk Standard-Baseboard v2A/ Pixhawk Standard-Baseboard v2B/ Mini-Fußleiste
- PM02D HV-Leistungsmodul
- Kabelsatz
Details
Völlig neues Design zur Schwingungsisolierung
Dieses neue Schwingungsisolationsdesign verwendet Wechselstromindividuell formuliertes, langlebiges Isoliermaterial auf Silikonbasis anstelle des herkömmlichen Schaumdesigns. BGestützt auf umfangreiche Forschung und Entwicklung sowie Tests bietet es optimale IMU-Dämpfungseigenschaften mit Resonanzfrequenz im höheren Spektrum, perfekt für industrielle und kommerzielle Drohnen
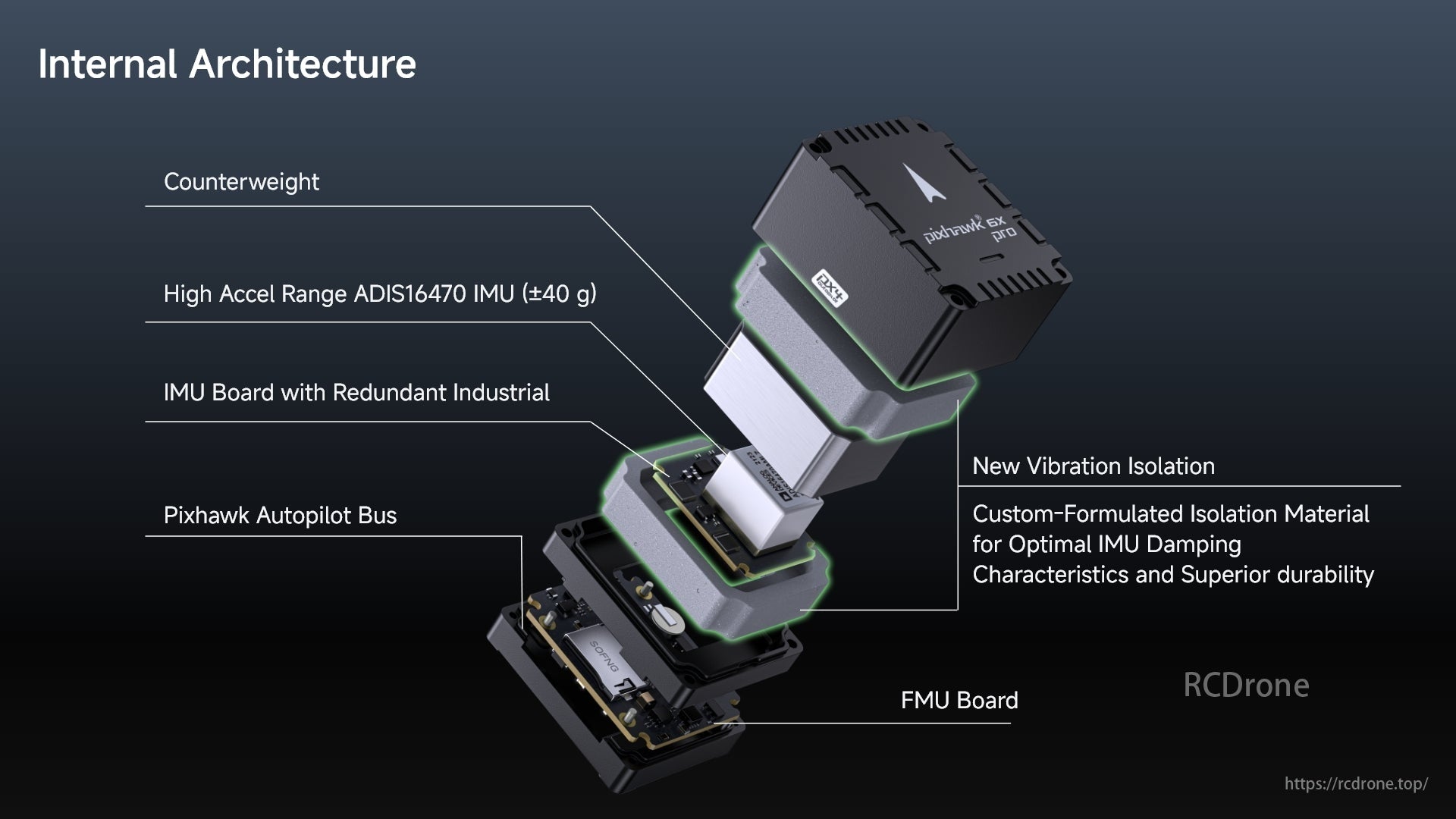
Interne Architektur: Gegengewicht, ADIS16470 IMU (±40 g) mit hohem Beschleunigungsbereich, redundante industrielle IMU-Platine, Pixhawk-Autopilot-Bus, neue Schwingungsisolierung, FMU-Platine.
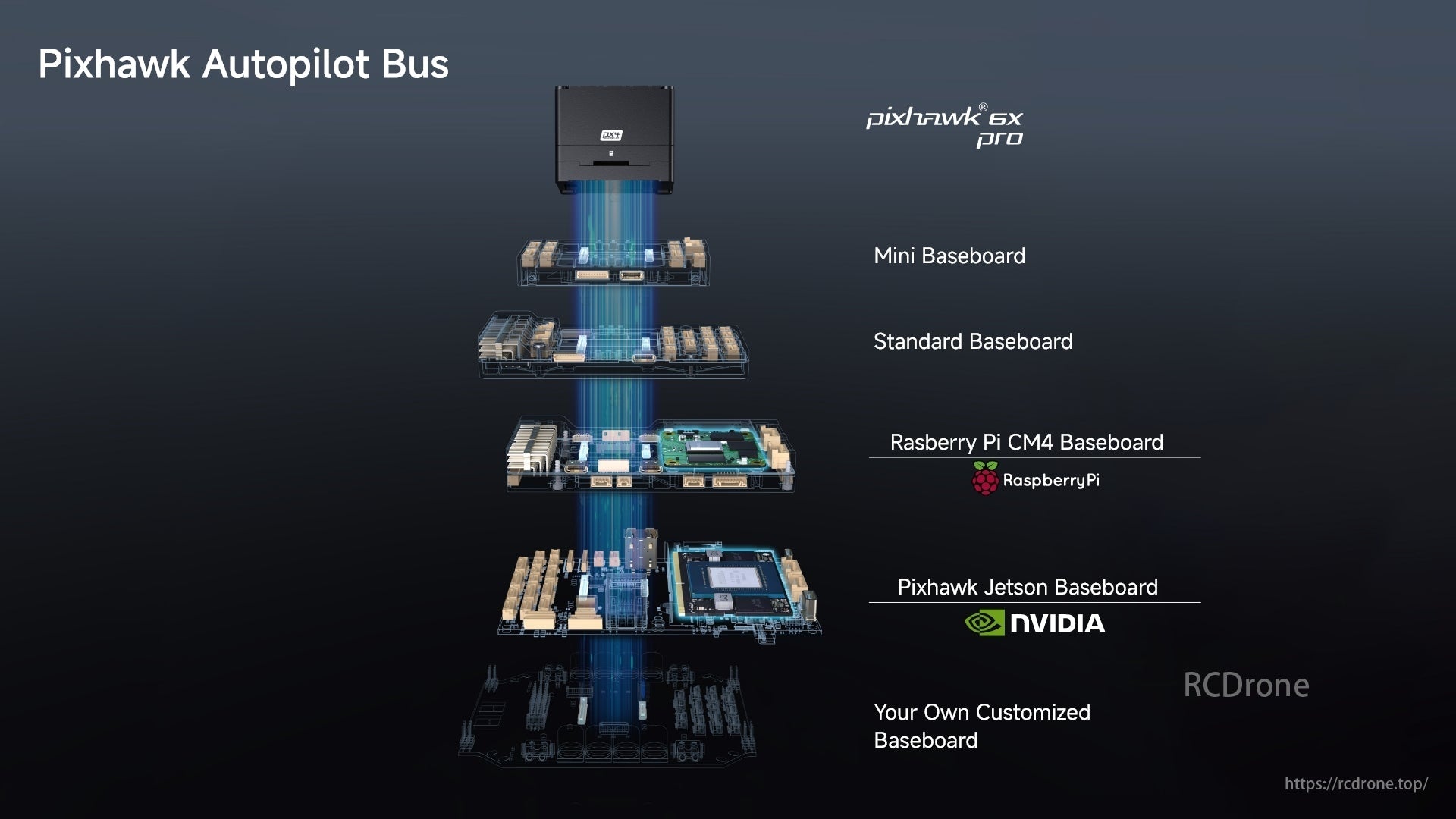
Der Pixhawk Autopilot Bus verbindet Mini, Standard, Raspberry Pi CM4, Jetson Baseboards und benutzerdefinierte Baseboards.
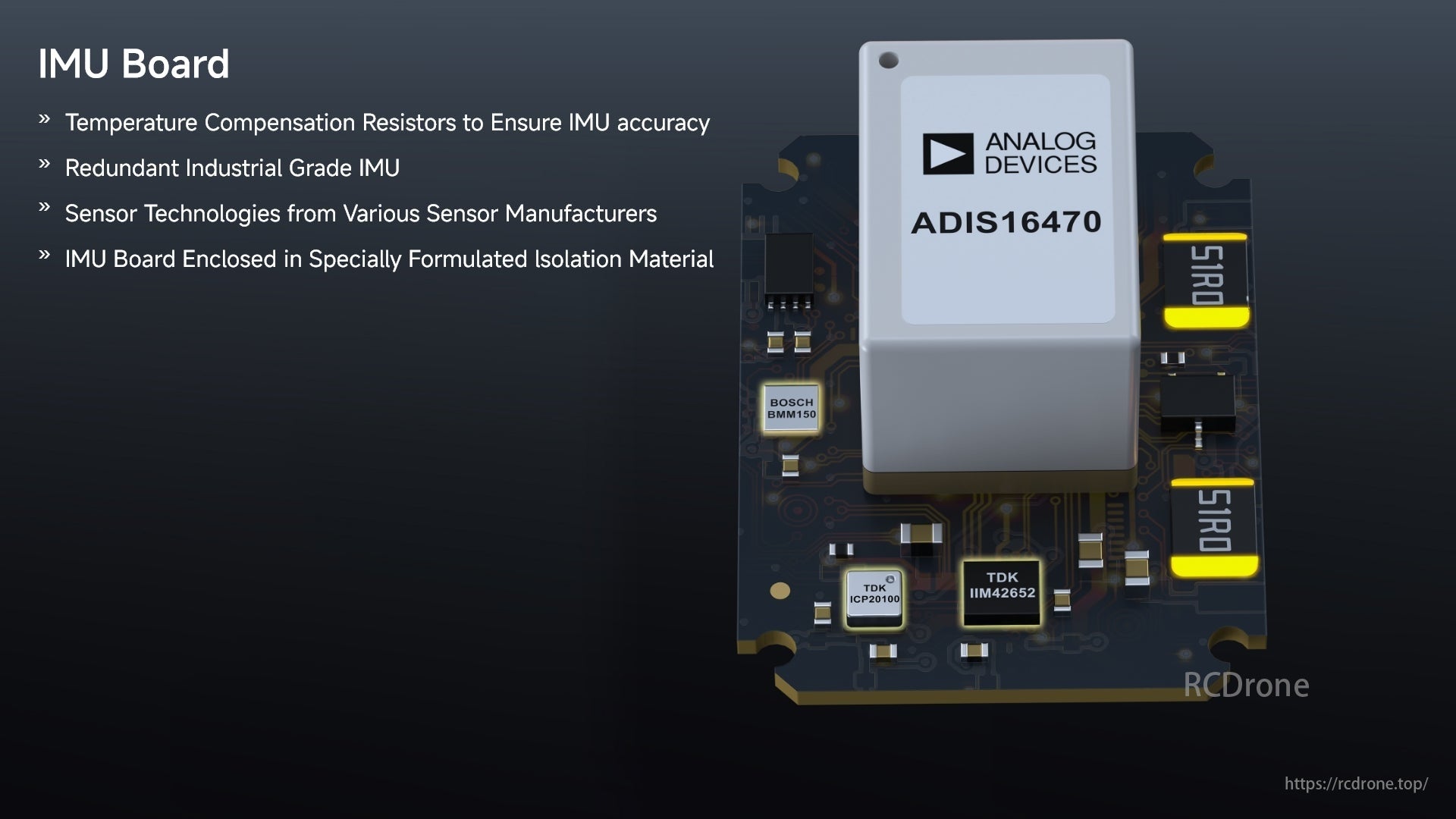
Die IMU-Platine verfügt über Temperaturkompensationswiderstände, eine redundante IMU in Industriequalität, Sensoren verschiedener Hersteller und ist in Isoliermaterial eingeschlossen.
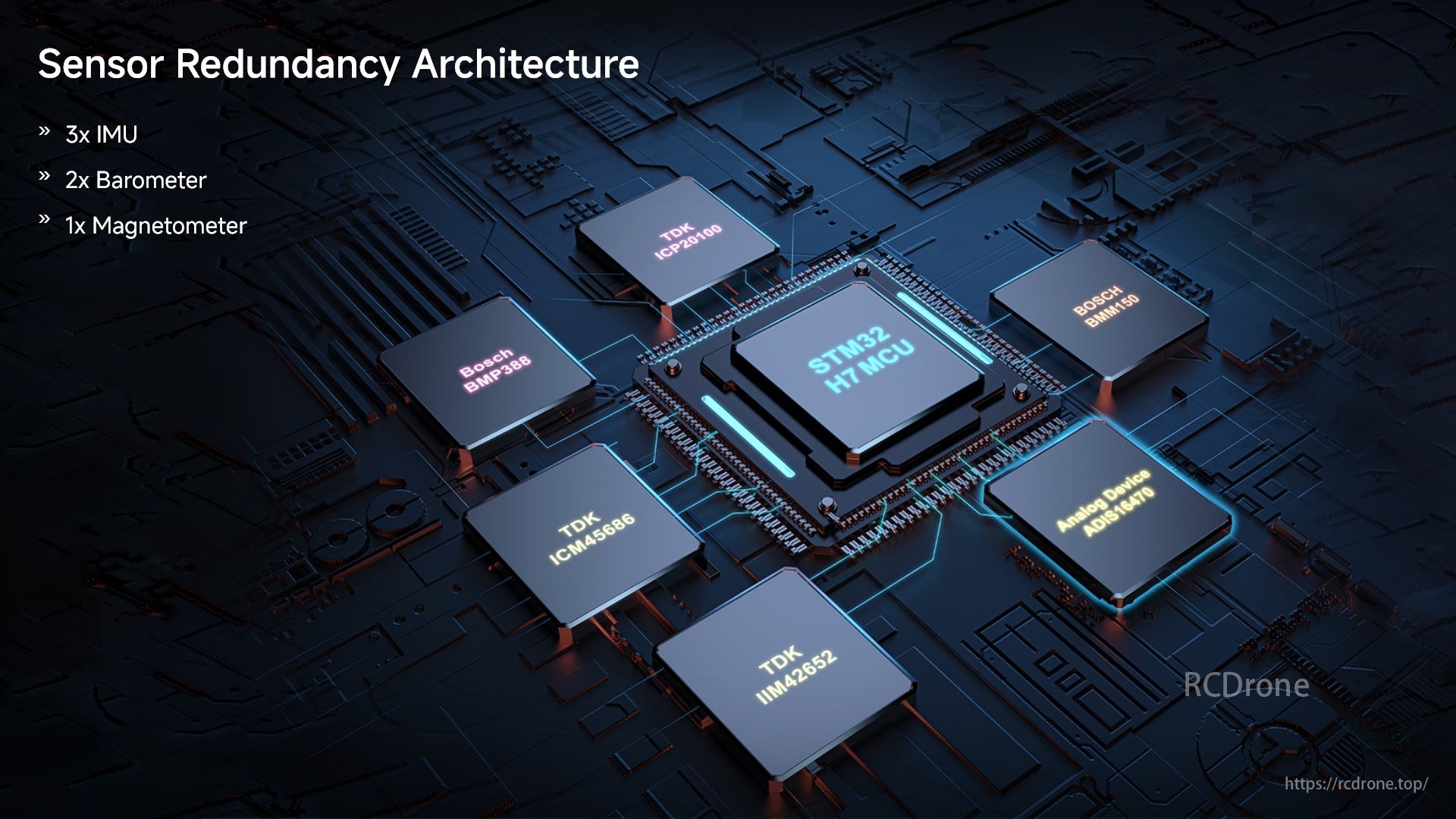
Die Sensorredundanzarchitektur umfasst 3x IMU, 2x Barometer und 1x Magnetometer und verfügt über Komponenten wie STM32 H7 MCU, TDK ICs, Bosch BMP388 und Analog Devices ADIS16470.
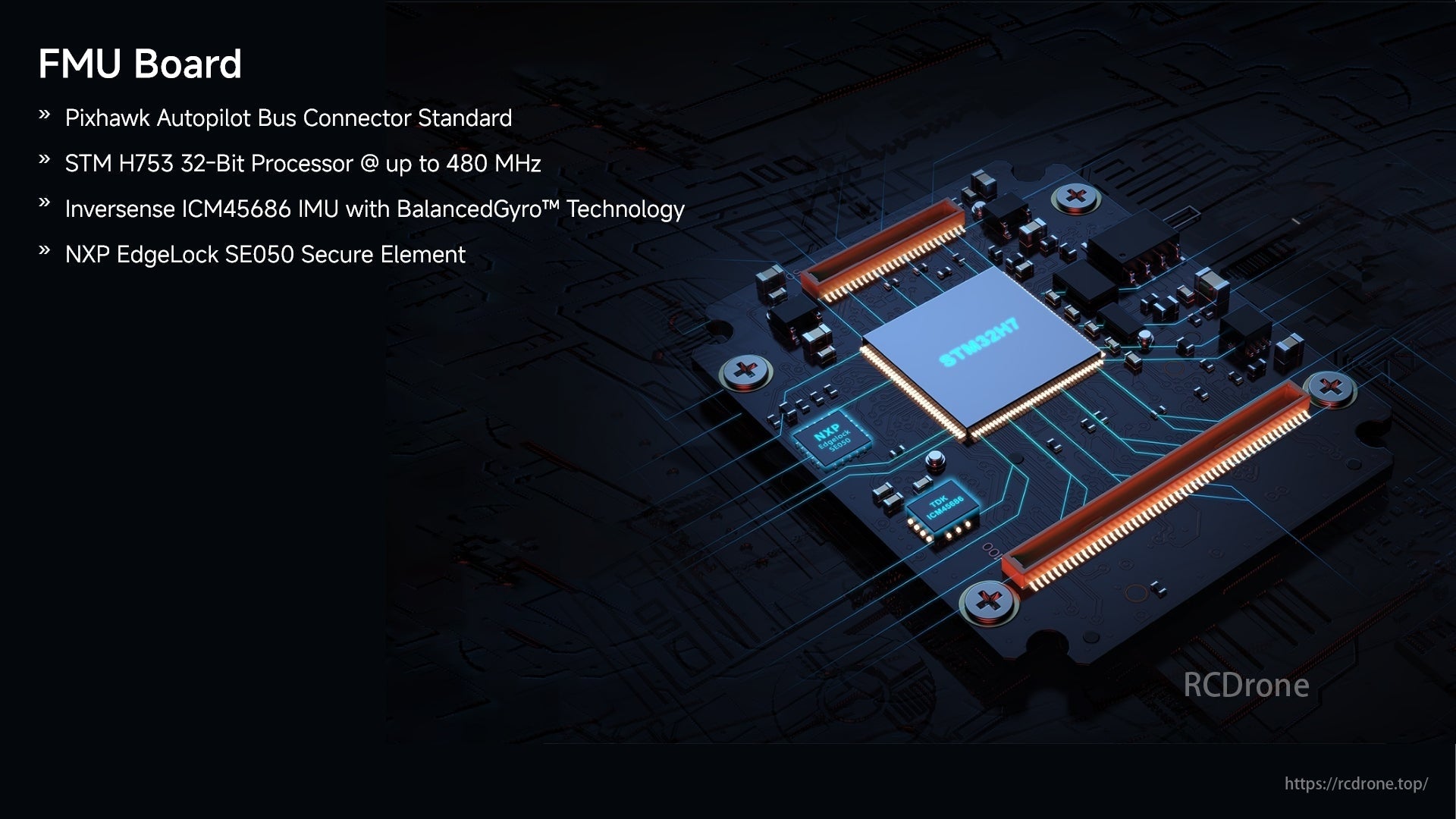
Die FMU-Platine verfügt über den Pixhawk Autopilot Bus Connector Standard, einen STM H753 32-Bit-Prozessor mit bis zu 480 MHz, eine Inversense ICM45686 IMU mit BalancedGyro-Technologie und ein NXP EdgeLock SE050 Secure Element.
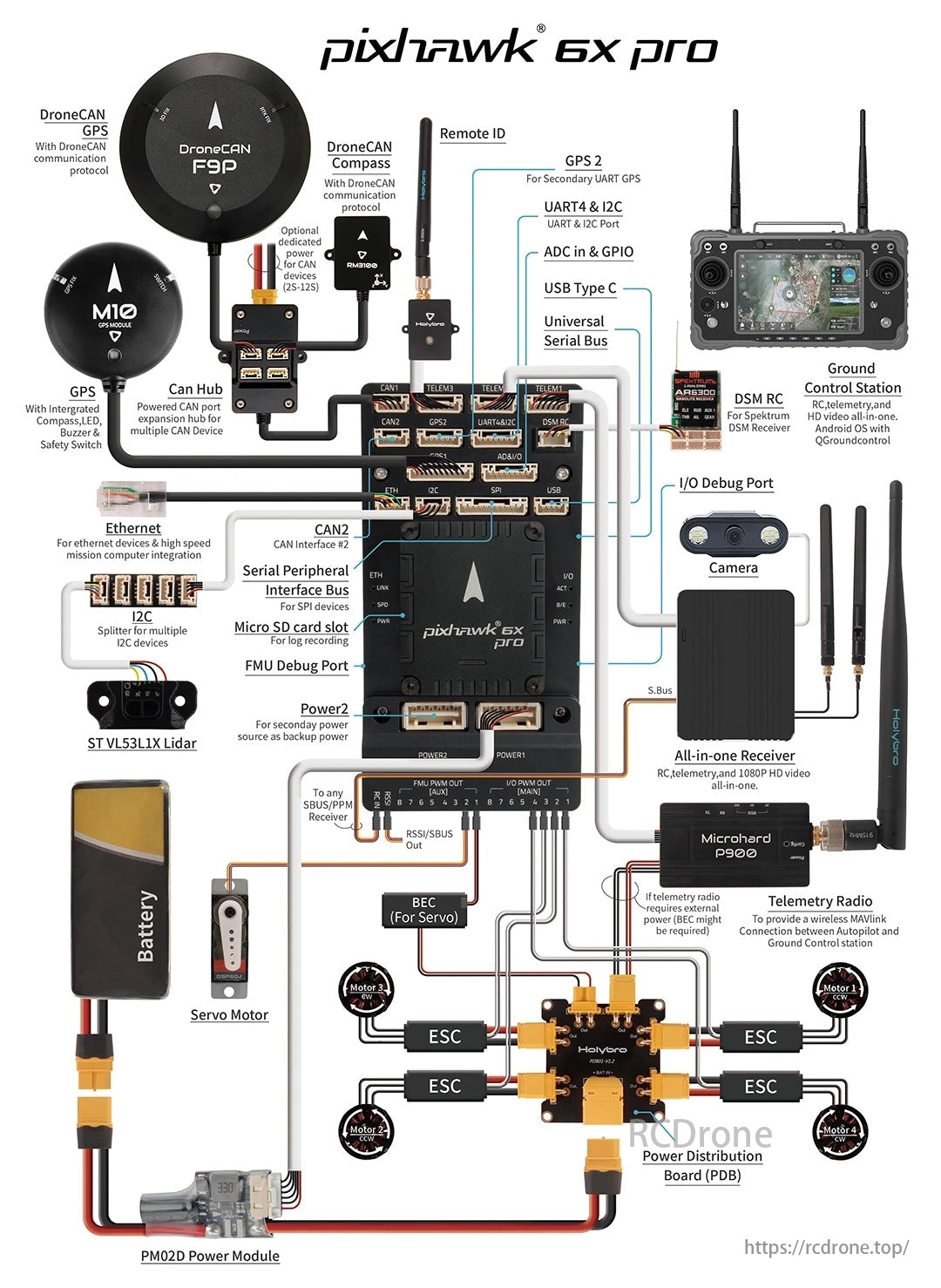
Das Pixhawk 6X Pro-Diagramm zeigt die Verbindungen für das Autopilotsystem einer Drohne, einschließlich GPS-Modulen, Kompass, Bodenkontrollstation, Kamera, Telemetriefunk, ESCs, Motoren und Stromverteilungsplatine. Für die Kommunikation zwischen den Komponenten werden verschiedene Schnittstellen wie CAN, I2C, UART und USB verwendet.
Related Collections